Embedded Networking and Communications :
Networking is sharing
Assignment for this week
- Design and build a wired and/or wireless network connecting at least two processors
- Link to this week’s home work page
----------------------------------------------------------------------------------------------------------------------------------
What I have done?
Specific material and softwares used during this assignment
- Material :
- 1 DHT11 temperature and humidity sensor
- 1 blue led
- 1 servo motor SG-5010
- 1 arduino Uno board without microcontroller as FTDI cable only
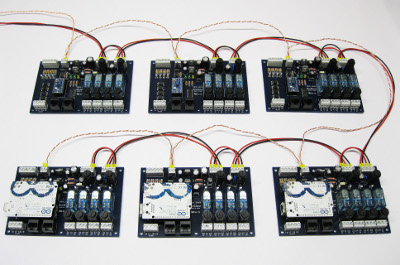
- 1 custom board for my final project (Greenhouse)
- 1 Hello board
- Breadboard and ATmega328
- 1 TinyIsp
- Jumper wires, lots of them
- Software :
- Arduino IDE
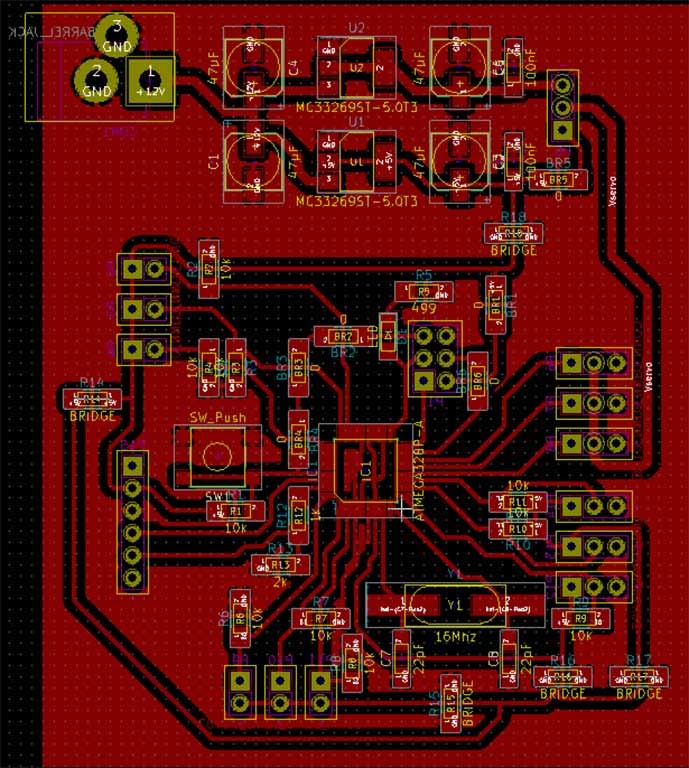
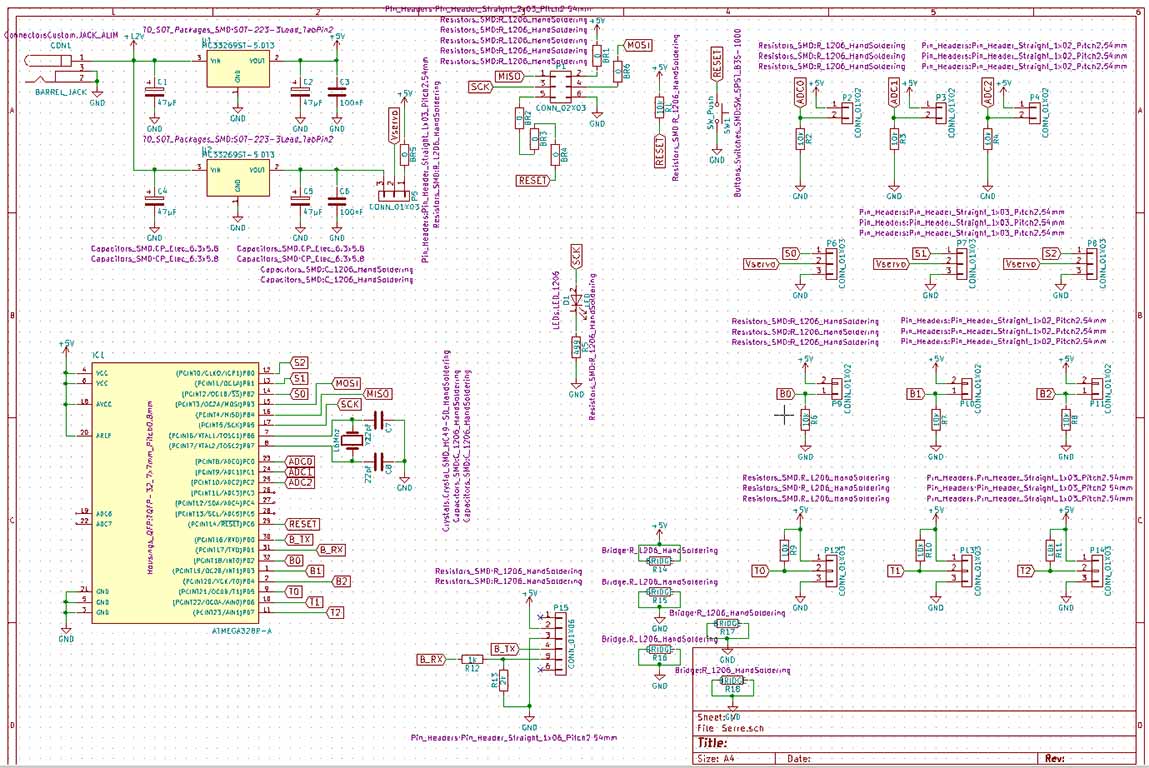
- KiCad
- Zadig to install the USB driver for the tinyISP
- 1 DHT11 temperature and humidity sensor
- 1 blue led
- 1 servo motor SG-5010
- 1 arduino Uno board without microcontroller as FTDI cable only
- 1 custom board for my final project (Greenhouse)
- 1 Hello board
- Breadboard and ATmega328
- 1 TinyIsp
- Jumper wires, lots of them
- Software :
- Arduino IDE
- KiCad
- Zadig to install the USB driver for the tinyISP
I will make a small network between my HelloBoard and my Greenhouse Board (again, Big thanks to Benoit for his help and patience!)
The goald is to read my DHT11 on one board and then display it via the other board
If I can, I will try with a bluethooth transmitter also
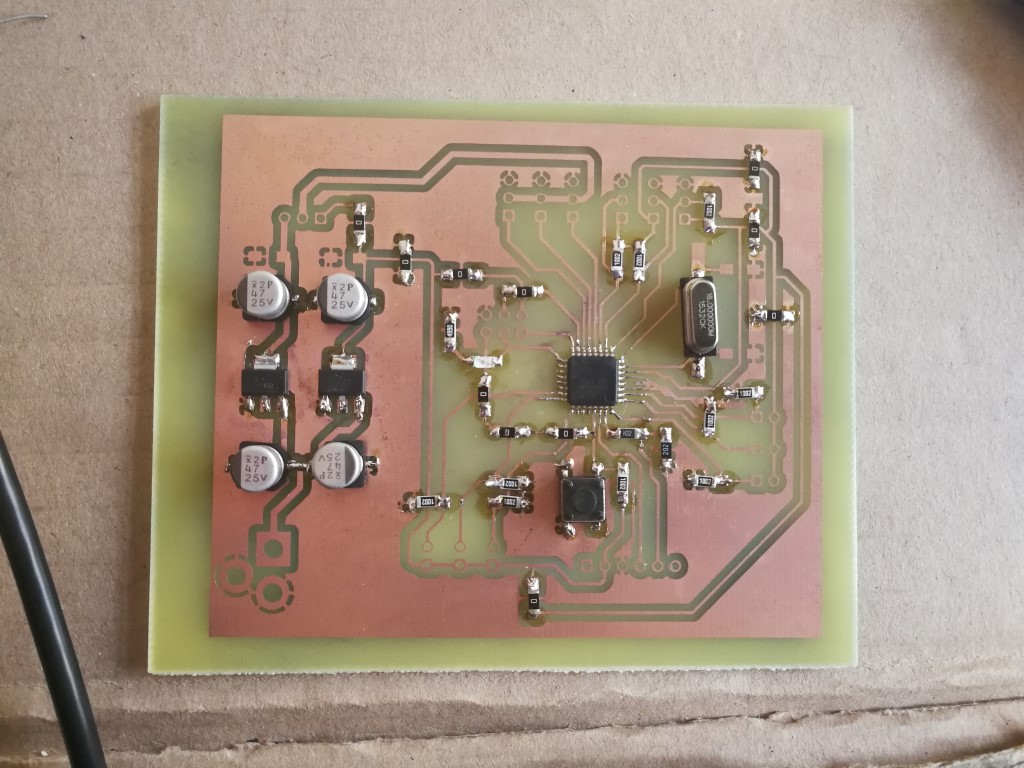
That board is the one I will use for my greenhouse (final project) so I can finished this assigment and goind forward for my final project

Sensors and motor
For this week,I will use only as the goal here is netorking : 1 motor, 1 Potentiometer the goal here is netorking
- DHT11 basic temperature-humidity sensor
- 1 servo motor SG-5010
- 1 potentiometer
- 1 blue led
Preparing of the boards
It's the first time I'm using my Greenhouse board so I will need to burn the bootloader.
Nothing new under the sun, I will use my TinyISP and the arduino to do it. You have to select the following options and then push "burn bootloader"
- Board = arduino uno as my greenhouse board is based on this design
- Processor = ATmega 328
- Programmer = USBTinyISP
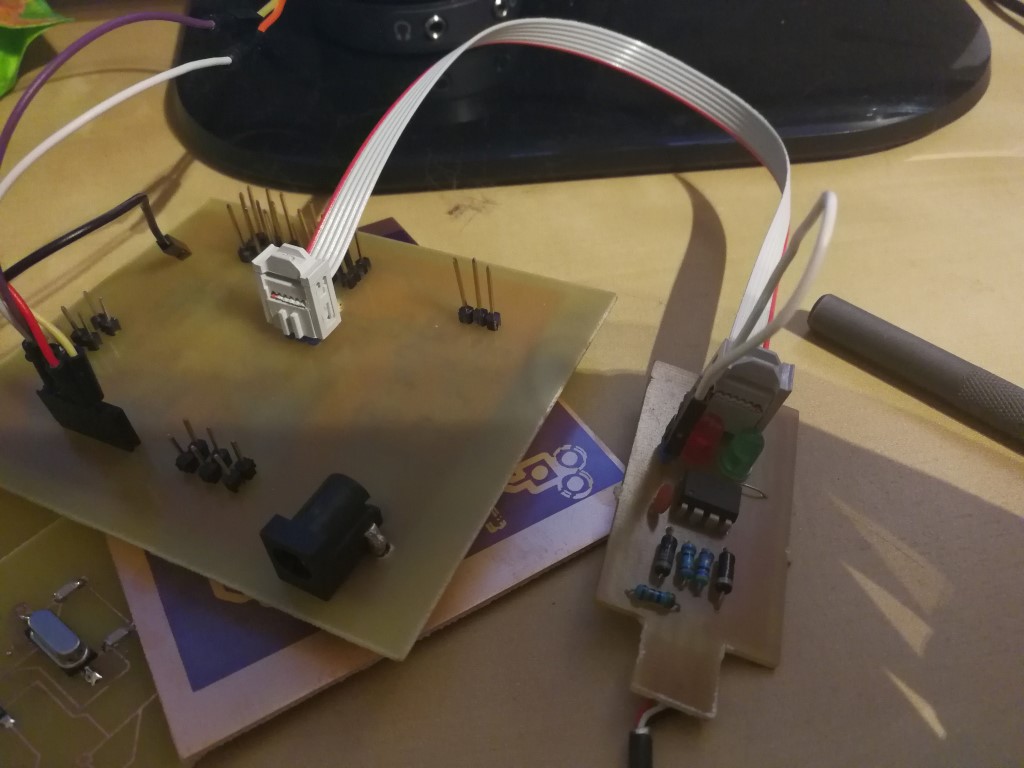
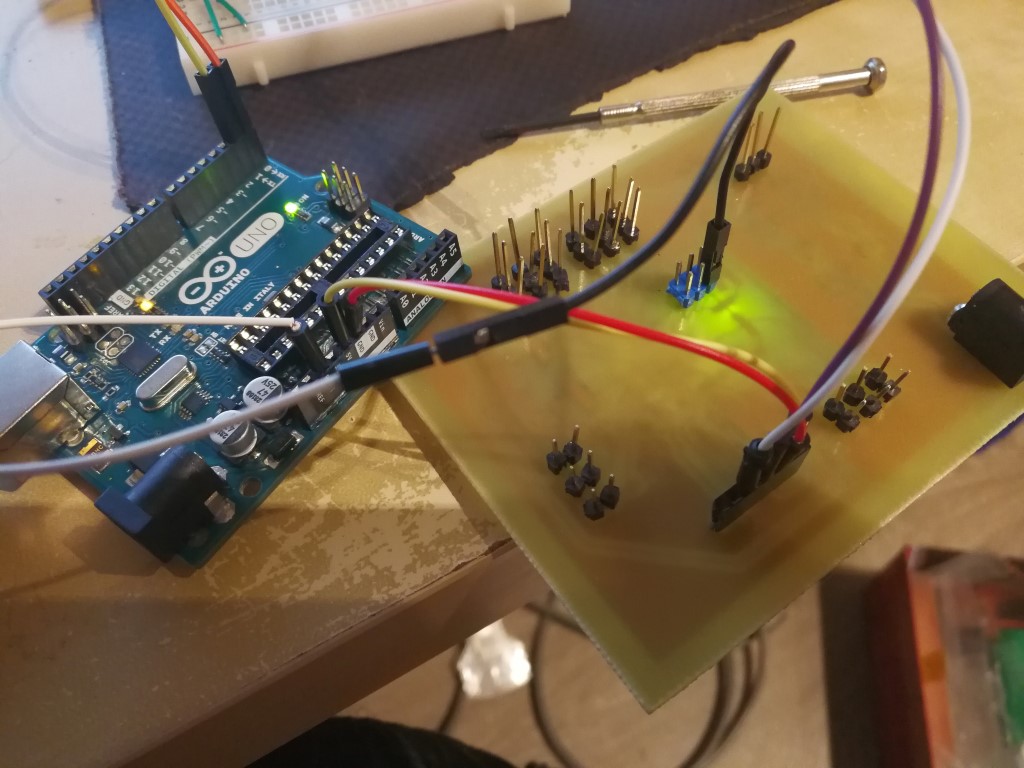
Once it's done, as I was missing an FTDI cable, I was forced to adapt, that's why I'm using part of an arduino board for the programming itself.

I will use the arduino board as a relay in order to programm my Greenhouse board. In fact I just want the TX and RX connectors (ok, +5v and ground are quite nice also :) )
- RX (as I'm using a bluetooth connectivity in my final project, the TX and RX are reversed here!)
- TX (as I'm using a bluetooth connectivity in my final project, the TX and RX are reversed here!)
- +5v
- ground
The networking itself (UPDATED, see at the end of the exercise, It was done with my final project and 2 boards)
I will use my Greenhouse board and a breadboard (some issue with my hello board) with an Atmega328 to establish a bidirectional communication (via serial) between the boards :- The Greenhouse board will have the DTH11 and the servo motor. It will send to the breadboard the value from the DTH11 and receive a value for the motor
- The breadboard will receive the value from the DTH11 and send value for the servo motor via the potentiometer
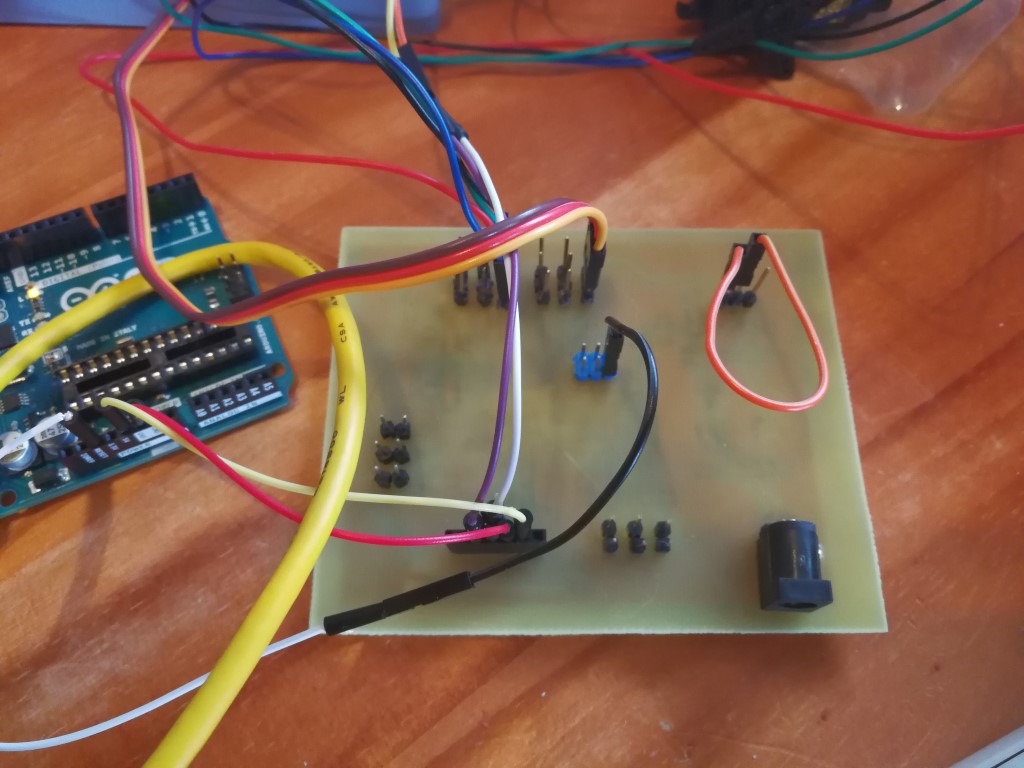
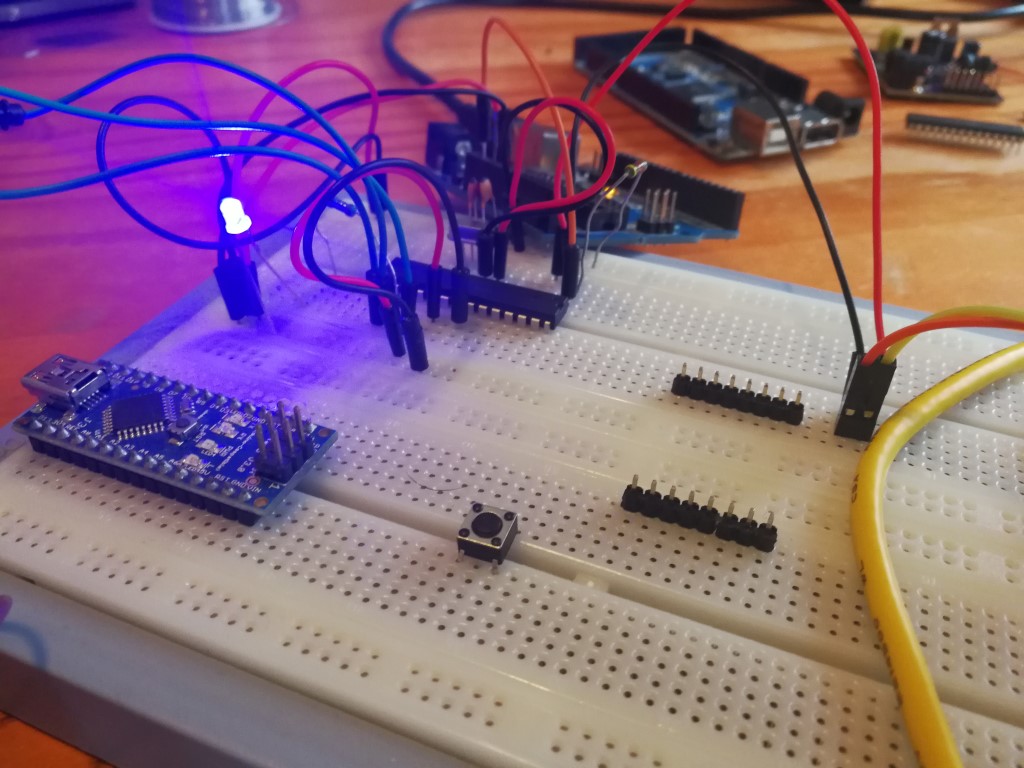
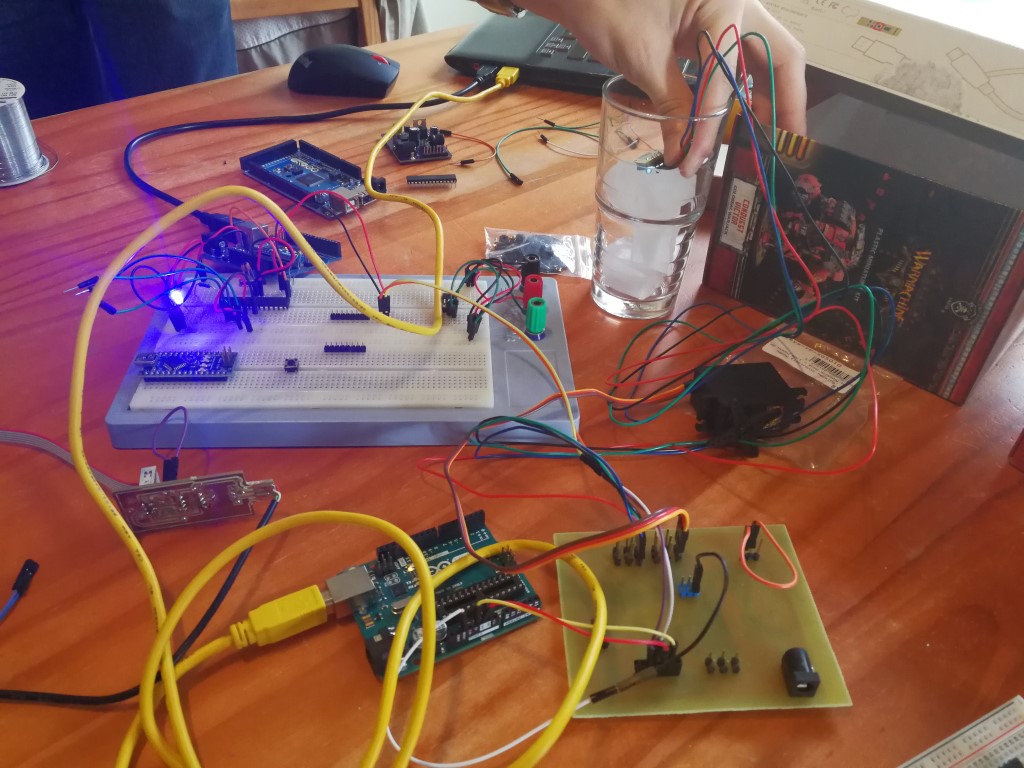
As you can see, I will use icecube to lower the temperature for the DTH11 (the blue led is the indicator : the brigher the hotter) and the potentiometer will send position values to the servo motor. The code for each board are below
Greenhouse board code
#include <DHT.h>
#include <DHT_U.h>
#include <Servo.h>
#define DHTTYPE DHT11
#define DHT0PIN 5
#define DHT1PIN 6
#define DHT2PIN 7
#define SERVO0PIN 10
#define SERVO1PIN 9
#define SERVO2PIN 8
#define PHOTO0PIN A0
#define PHOTO1PIN A1
#define PHOTO2PIN A2
#define BUTTON0PIN 2
#define BUTTON1PIN 3
#define BUTTON2PIN 4
Servo mservo;
DHT dht2(DHT2PIN, DHTTYPE);
String inputString = ""; // a string to hold incoming data
boolean stringComplete = false; // whether the string is complete
void setup() {
// initialize serial:
Serial.begin(9600);
mservo.attach(SERVO0PIN);
dht2.begin();
// reserve 200 bytes for the inputString:
inputString.reserve(200);
}
void loop() {
if (stringComplete) {
switch (inputString.charAt(0)) {
case 'S':
setServo(inputString);
break;
default:
break;
}
inputString = "";
stringComplete = false;
}
}
void setServo(String command) {
int pos = command.substring(1).toInt();
mservo.write(pos);
delay(1000);
}
float oldH;
float oldT;
void readDHT() {
float h = dht2.readHumidity();
float t = dht2.readTemperature();
if (isnan(h) || isnan(t)) {
}
else {
if (h != oldH) {
Serial.print("H");
Serial.println(h);
oldH = h;
}
if (t != oldT) {
Serial.print("T");
Serial.println(t);
oldT = t;
}
}
}
void serialEvent() {
while (Serial.available()) {
// get the new byte:
char inChar = (char)Serial.read();
// add it to the inputString:
inputString += inChar;
// if the incoming character is a newline, set a flag
// so the main loop can do something about it:
if (inChar == '\n') {
stringComplete = true;
}
}
}
The Breadboard code
#define GPIN 2
#define RPIN 11
String inputString = ""; // a string to hold incoming data
boolean stringComplete = false; // whether the string is complete
int prevVal;
void setup() {
// initialize serial:
Serial.begin(9600);
// reserve 200 bytes for the inputString:
inputString.reserve(1);
pinMode(GPIN, OUTPUT);
pinMode(RPIN, OUTPUT);
digitalWrite(RPIN, LOW);
digitalWrite(GPIN, LOW);
prevVal = 0;
}
void loop() {
// print the string when a newline arrives:
//Serial.println("test");
if (stringComplete) {
Serial.println(inputString);
switch(inputString.charAt(0)){
case 'H':
break;
case 'T':
ledTemp(inputString);
break;
}
// clear the string:
inputString = "";
stringComplete = false;
}
int val;
val = analogRead(A0);
if(val != prevVal) {
prevVal = val;
val = map(val, 0, 1023, 0, 180);
Serial.print("S");
Serial.println(val);
}
}
void ledTemp(String s) {
int temp = s.substring(1).toInt();
analogWrite(RPIN, map(temp, 20, 40, 0, 1023));
}
void serialEvent() {
while (Serial.available()) {
// get the new byte:
char inChar = (char)Serial.read();
inputString += inChar;
if (inChar == '\n') {
stringComplete = true;
}
}
}
Proof in videos
Greenhouse board to Breadboard Greenhouse board to BreadboardUPDATED, Networking with 2 homemade boards
I have made a serial communication network with my hello board from week6 and my final project board.
The goal is when I press on the button on my Hello Board, the door opens.
Greenhouse board improved code
#include <DHT.h>
#include <Servo.h>
#define DHTTYPE DHT11
#define DHT0PIN 7
#define DHT1PIN 6
#define DHT2PIN 5
#define SERVO0PIN 10
#define SERVO1PIN 9
#define SERVO2PIN 8
#define PHOTO0PIN A0
#define PHOTO1PIN A1
#define PHOTO2PIN A2
#define BUTTON0PIN 2
#define BUTTON1PIN 3
#define BUTTON2PIN 4
#define TIMER_PERIOD 200
#define SERVOANGLEOPEN 10
#define SERVOANGLECLOSE 160
#define SERVOANGLEDEFAULT 90
int Temp = 30;
int Hyst = 1;
DHT dht0(DHT0PIN, DHTTYPE);
DHT dht1(DHT1PIN, DHTTYPE);
DHT dht2(DHT2PIN, DHTTYPE);
DHT dht[] = {dht0, dht1, dht2};
Servo s0;
Servo s1;
Servo s2;
Servo s[] = {s0, s1, s2};
int sPin[] = {SERVO0PIN, SERVO1PIN, SERVO2PIN};
int sValues[] = {SERVOANGLEDEFAULT, SERVOANGLEDEFAULT, SERVOANGLEDEFAULT};
float te[] = {0, 0, 0};
float hu[] = {0, 0, 0};
char photoPin[] = {PHOTO0PIN, PHOTO1PIN, PHOTO2PIN};
char buttonPin[] = {BUTTON0PIN, BUTTON1PIN, BUTTON2PIN};
int interruptCounter = 0;
String inputString = "";
boolean stringComplete = false;
void setup() {
setupDHT();
//setupServo();
setupButton();
inputString.reserve(200);
Serial.begin(9600);
}
void setupDHT() {
dht0.begin();
dht1.begin();
dht2.begin();
}
/* void setupServo() {
s0.attach(SERVO0PIN);
s1.attach(SERVO1PIN);
s2.attach(SERVO2PIN);
}*/
void setupButton() {
pinMode(BUTTON0PIN, INPUT);
pinMode(BUTTON1PIN, INPUT);
pinMode(BUTTON2PIN, INPUT);
}
void loop() {
delay(10);
// put your main code here, to run repeatedly:
if (stringComplete) {
processSerial(inputString);
inputString = "";
stringComplete = false;
}
interruptCounter++;
if (interruptCounter > TIMER_PERIOD) {
interruptCounter = 0;
for(int i = 0; i < 3 ; i++ ) {
float t = readTemp(i);
float h = readHumid(i);
if (!isnan(h) && !isnan(t)) {
hu[i] = h;
te[i] = t;
}
}
}
/* for(int z = 0; z < 3; z++) {
checkTemp(z);
}*/
}
//Hysteresis. At 31° => Open door. At 29° => Close door
void checkTemp(int moduleNumber) {
if(te[moduleNumber] >= Temp + Hyst) { // Changer signe
if(readServoAngle(moduleNumber) != SERVOANGLEOPEN) {
moveServo(moduleNumber, SERVOANGLEOPEN);
}
}
else {
if(te[moduleNumber] <= Temp - Hyst) {
if(readServoAngle(moduleNumber) != SERVOANGLECLOSE) {
moveServo(moduleNumber, SERVOANGLECLOSE);
}
}
}
}
void processSerial(String serialString) {
switch (serialString.charAt(0)) {
case 'M':
processModuleCommand(serialString);
break;
default:
break;
}
}
void processModuleCommand(String serialString) {
int moduleNumber = serialString.substring(1).toInt();
String command = getNextPart(serialString,':');
switch (command.charAt(0)) {
case 'S':
sendModuleStatus(moduleNumber);
break;
case 'D':
handleDoor(moduleNumber, command);
break;
case 'P':
moveServoCommand(moduleNumber, command);
break;
default:
break;
}
}
/*
* M0: => Selection Module (M : Module; 0,1,2 : Module 0,1,2)
*
* S => Status : M0>D1/T20/H90/L95/S120/B1 (D : Door 1Open/0Closed, T : Temp, H: Humidity, L: Luminosity, S: Servo °, B : Button 1Open/0Closed)
* D1 => Open Door
* D0 => Close Door
*/
void sendModuleStatus(int moduleNumber) {
int l = readLuminosity(moduleNumber);
int sa = readServoAngle(moduleNumber);
int b = readButton(moduleNumber);
Serial.print("M");
Serial.print(moduleNumber);
Serial.print(">T");
Serial.print(te[moduleNumber]);
Serial.print("/H");
Serial.print(hu[moduleNumber]);
Serial.print("/L");
Serial.print(l);
Serial.print("/S");
Serial.print(sa);
Serial.print("/B");
Serial.println(b);
}
float readTemp(int moduleNumber) {
return dht[moduleNumber].readTemperature();
}
float readHumid(int moduleNumber) {
return dht[moduleNumber].readHumidity();
}
int readLuminosity(int moduleNumber) {
int sVal = analogRead(photoPin[moduleNumber]);
int percent = sVal * (100 / 1023);
return sVal;
}
int readServoAngle(int moduleNumber) {
return sValues[moduleNumber];
}
int readButton(int moduleNumber) {
return digitalRead(buttonPin[moduleNumber]);
}
void handleDoor(int moduleNumber, String command) {
int oc = command.substring(1).toInt();
if(oc < 1) {
moveServo(moduleNumber, SERVOANGLECLOSE);
}
else {
moveServo(moduleNumber, SERVOANGLEOPEN);
}
}
void moveServoCommand(int moduleNumber, String command) {
int angle = command.substring(1).toInt();
moveServo(moduleNumber, angle);
}
void moveServo(int moduleNumber, int angle) {
sValues[moduleNumber] = angle;
s[moduleNumber].attach(sPin[moduleNumber]);
s[moduleNumber].write(angle);
delay(1000);
s[moduleNumber].detach();
}
//Cut the string at the specified length and return the right side.
String getNextPart(String s, char separator) {
for(int i = 0; i < s.length(); i++) {
if(s[i] == separator) {
return s.substring(i+1);
}
}
return "";
}
void serialEvent() {
while (Serial.available()) {
// get the new byte:
char inChar = (char)Serial.read();
// add it to the inputString:
inputString += inChar;
// if the incoming character is a newline, set a flag
// so the main loop can do something about it:
if (inChar == '\n') {
Serial.println(inputString);
stringComplete = true;
}
}
}
The Hello Board code
#include <SoftwareSerial.h>
#define BUTTONPIN 8
#define LEDPIN 2
SoftwareSerial mySerial(0, 1); // RX, TX
boolean openclose = true;
int buttonState;
int lastButtonState = LOW;
unsigned long lastDebounceTime = 0;
unsigned long debounceDelay = 50;
void setup() {
// set the data rate for the SoftwareSerial port
mySerial.begin(9600);
pinMode(BUTTONPIN, INPUT);
pinMode(LEDPIN, OUTPUT);
digitalWrite(LEDPIN, LOW);
}
void loop() { // run over and over
int reading = digitalRead(BUTTONPIN);
if (reading != lastButtonState) {
lastDebounceTime = millis();
}
if ((millis() - lastDebounceTime) > debounceDelay) {
if (reading != buttonState) {
buttonState = reading;
if (buttonState == HIGH) {
setDoor();
}
}
}
lastButtonState = reading;
}
void setDoor() {
if(openclose) {
digitalWrite(LEDPIN, HIGH);
mySerial.write("M0:D0\n");
openclose = false;
}
else {
if(!openclose) {
digitalWrite(LEDPIN, LOW);
mySerial.write("M0:D1\n");
openclose = true;
}
}
}
It was a litlle complex when so few connectors available but it worked, see below!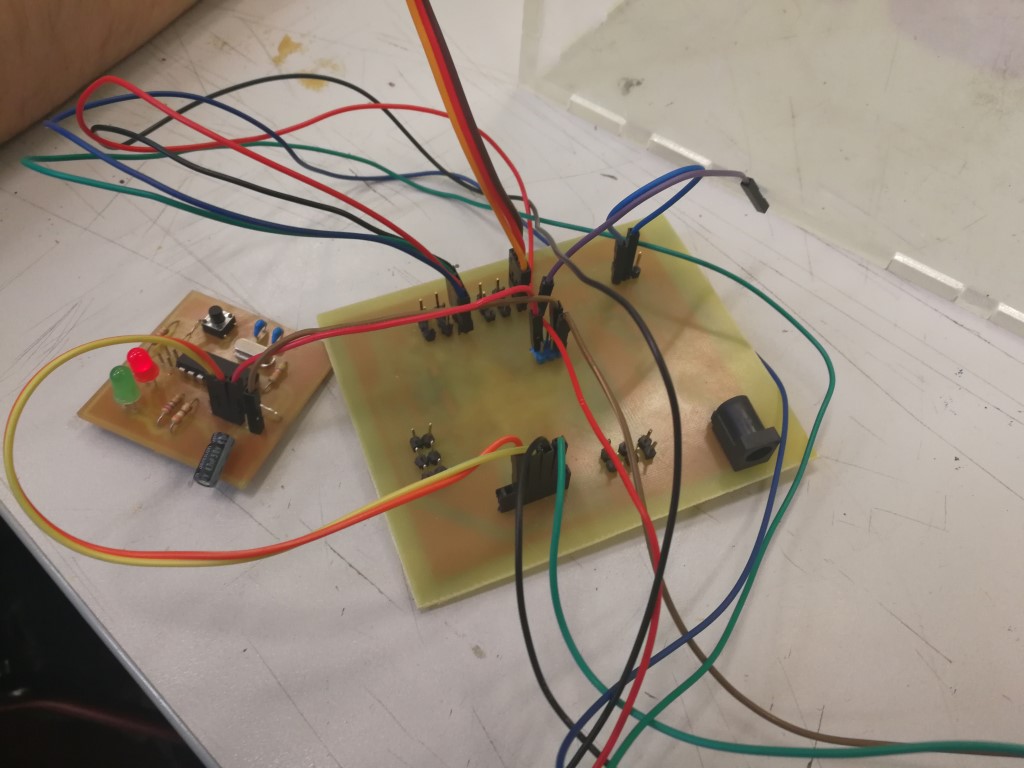
Summary :
This assignment was really nice and was a huge chunk of the electronic work I will have to make for my final project