Machine design :
let's improve our machine!
Assignment for this week
- automate your machine and document the group project and your individual contribution
----------------------------------------------------------------------------------------------------------------------------------
What I have done?
Specific material and softwares used during this assignment
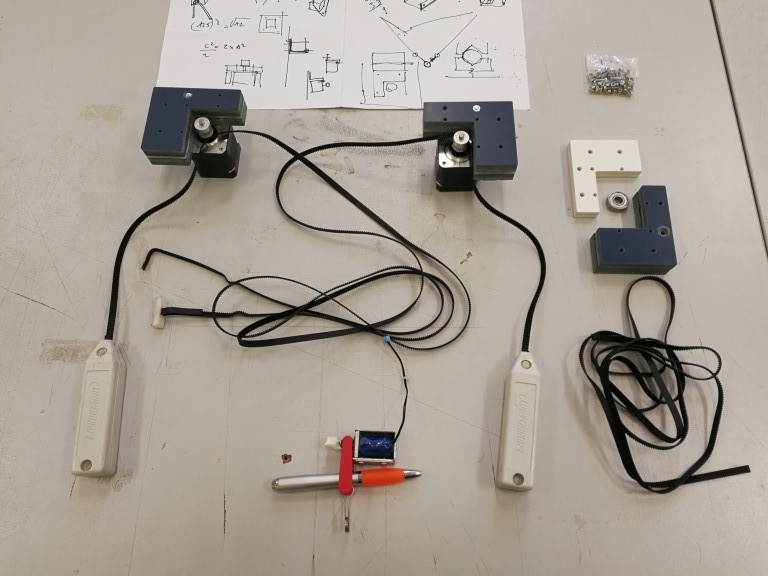
- Material :
- 1 arduino MEGA
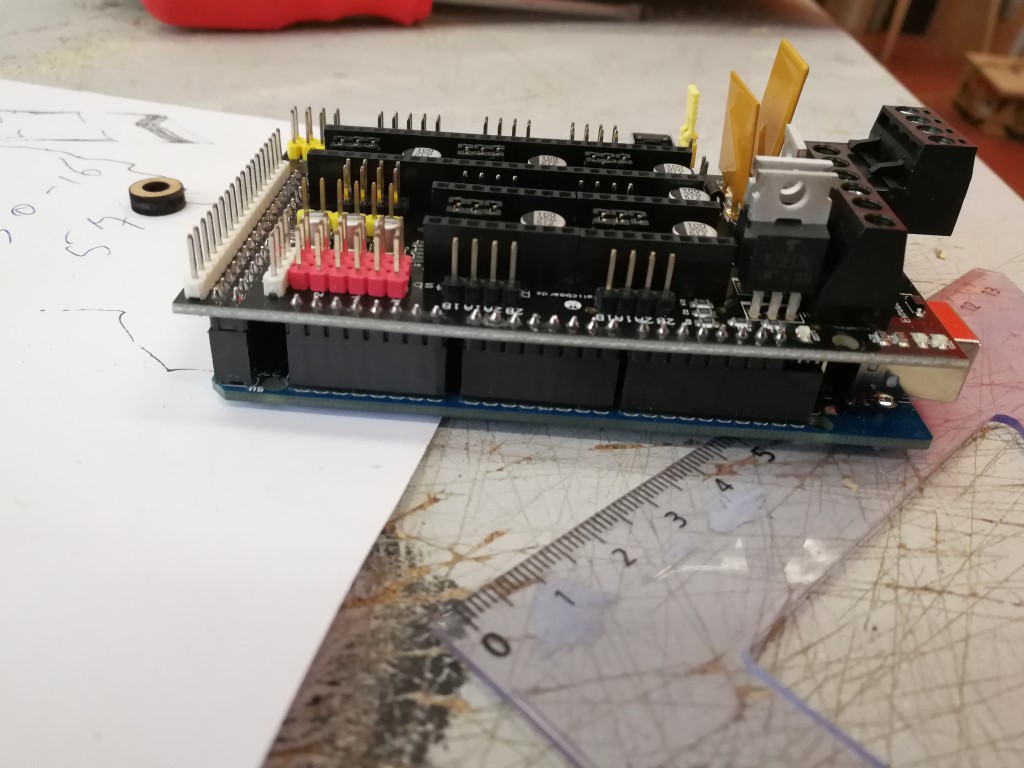
- 1 RAMPS 1.4
- 1 alimentation 230VAC to 12DC
- 2 Pololu a4988
- 2 counterweigh from windows blind
- 2 GT2 belts
- 2 NEMA17 moto with 20 tooth wheel
- 3d printed end effector
- Software :
- Arduino IDE
- Cura Slicer
- 1 arduino MEGA
- 1 RAMPS 1.4
- 1 alimentation 230VAC to 12DC
- 2 Pololu a4988
- 2 counterweigh from windows blind
- 2 GT2 belts
- 2 NEMA17 moto with 20 tooth wheel
- 3d printed end effector
- Software :
- Arduino IDE
- Cura Slicer
Improving the machine
After our tests, we can see that the machine can work but the current hardware is limiting us in both speed and precision.We need to improve :
- The motors
- the rope
- The end effector
- The conterweighs
- The electronic components
- The code
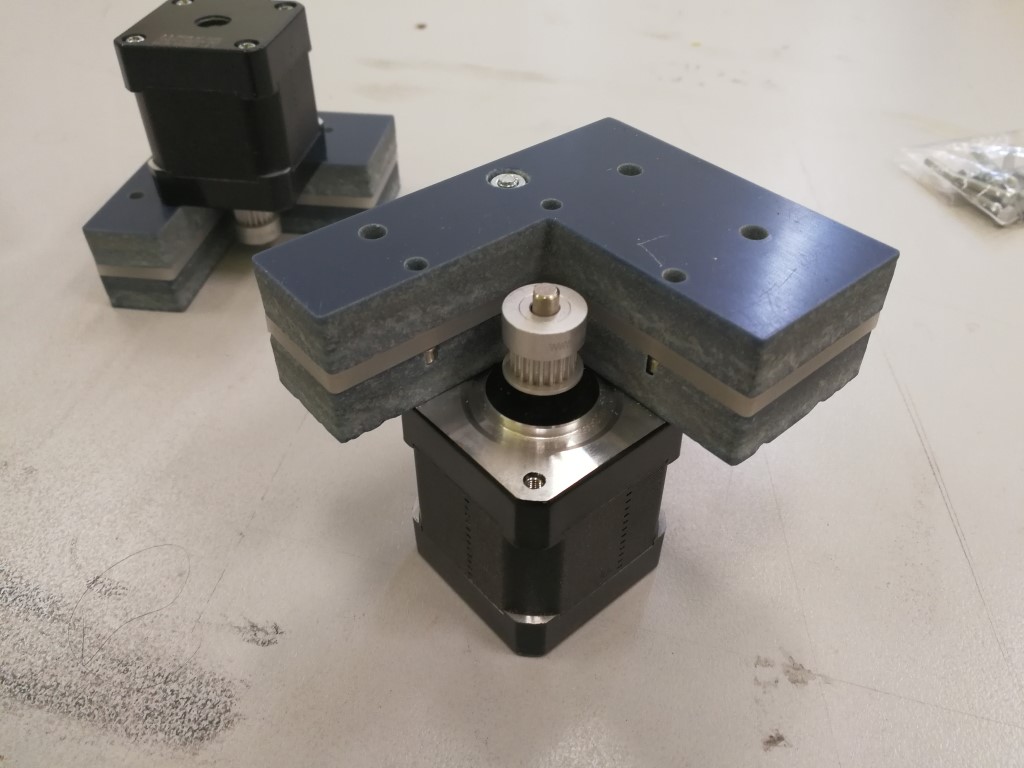
Improving the motors
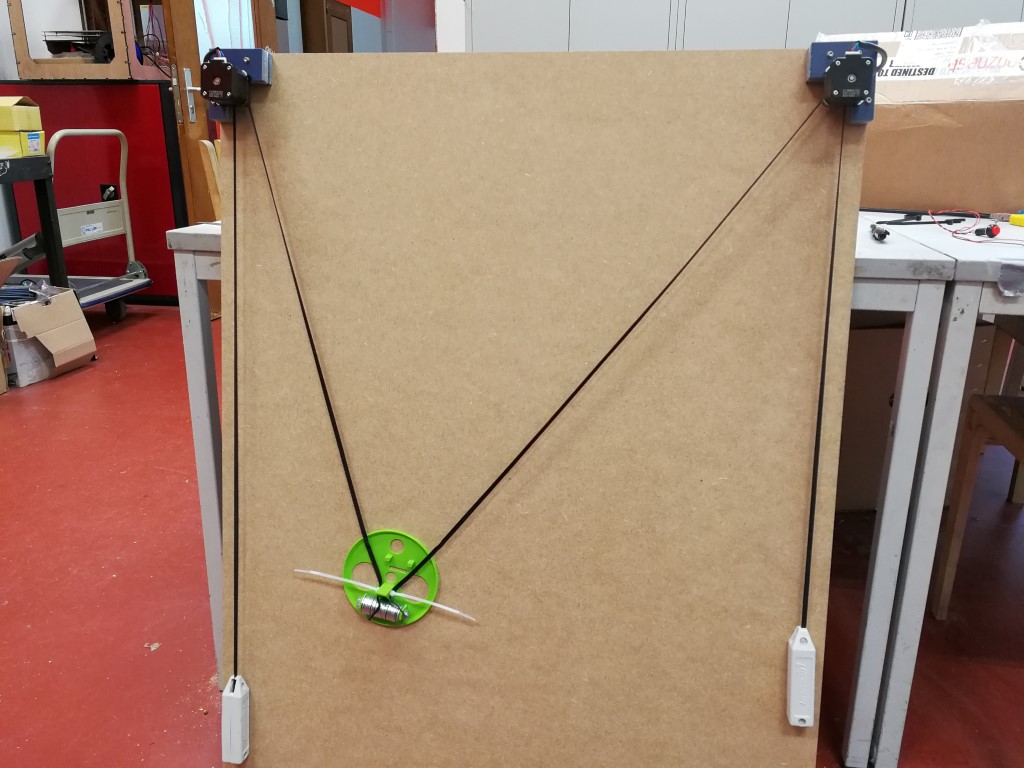
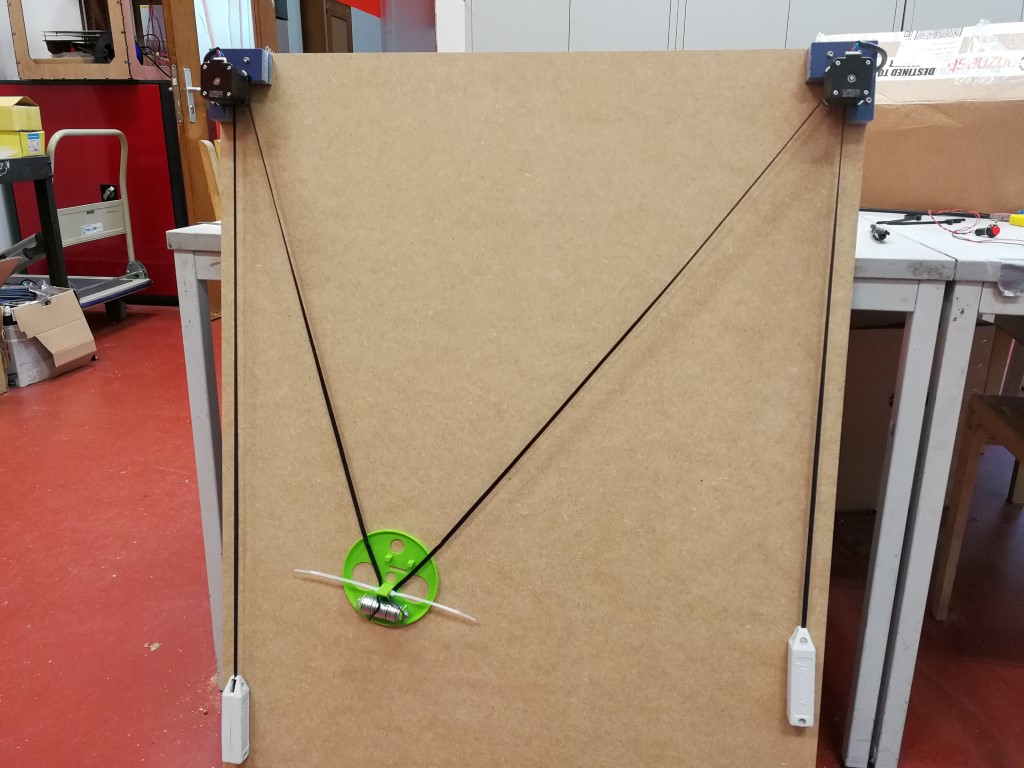
We have switch the motor in the kit for 2 Nema17 with 20 tooth wheel for GT2 belts.Each motor is now embedded in a piece of Hi-Macs (thanks David!) and then fixed in a smaller drawing board
Improving the rope
We are now using two GT2 belts from a delta 3d printer made by ourself and now cannibalized for this projectImproving the end effector
We were using different end effector for our tests and it still need improvement, especially if we want to add a step motor to move up and down the pen.For now, we are testing this one

Improving the conterweighs
After the cans, we tried the conterweighs from our window blinds and it's was working pretty well! We can open them to adjust the weighImproving the electronic components
We have changed a lot from our initial setup. The base is now a Ramps 1.4 with an arduino MEGA and 2 Pololu a4988 configured for 1/16th microstep. To power all of this, we are using a alimentation 230VAC to 12VDC This setup allows us now to be much more precise and to reach a greater approximation value for our drawing

Improving the code
This is of course the trickiest part. Thanks to Denis, we have now a solid piece of code to start but a lot of things need to be changed (new electronics, size,...)For this part, a friend of mine, Benoit Sobrie, help us a lot, thanks again!
For now :
- we convert X,Y coordinate to A,B belt length.
- Write the letter F and A.
- Use RAMPS as controler.
/*
* V0 : Benoit Sobrie
* - Convert X,Y coordinate to A,B belt length.
* - Can draw lines with provided (absolute) coordinates.
* - Write the letter F and A.
* - Use RAMPS as controler.
*/
#define A_STEP_PIN 54 // X
#define A_DIR_PIN 55
#define A_ENABLE_PIN 38
#define B_STEP_PIN 60 // Y
#define B_DIR_PIN 61
#define B_ENABLE_PIN 56
#define STEP_DELAY 500 // Motor speed
#define STEP_ENDDELAY 500 // Motor speed
//Distance between stepper motor shafts
#define W 728
#define DIR_REVERSE_A
//#define DIR_REVERSE_B
#define STEPS_PER_mm_A 80 //80 with 1/16 microstep, GT2 belt and 20 tooth
#define STEPS_PER_mm_B 80 //80 with 1/16 microstep, GT2 belt and 20 tooth
#define DEBUG
#ifdef DEBUG
#define DEBUG_PRINTLN(x) Serial.println (x);
#define DEBUG_PRINT(x) Serial.print (x);
#else
#define DEBUG_PRINTLN(x)
#define DEBUG_PRINT(x)
#endif
#ifdef DEBUGSTEPPER
#define DEBUGSTEPPER_PRINTLN(x) Serial.println (x);
#define DEBUGSTEPPER_PRINT(x) Serial.print (x);
#else
#define DEBUGSTEPPER_PRINTLN(x)
#define DEBUGSTEPPER_PRINT(x)
#endif
bool start = true;
float xpen0=100.f;
float ypen0=100.f;
typedef struct point
{
float x;
float y;
} point;
void setup() {
Serial.begin(115200);
SetupStepper();
}
void SetupStepper() {
DEBUG_PRINT("# Stepper A : (E:")
DEBUG_PRINT(A_ENABLE_PIN)
DEBUG_PRINT(",S:")
DEBUG_PRINT(A_STEP_PIN)
DEBUG_PRINT(",D:")
DEBUG_PRINT(A_DIR_PIN)
DEBUG_PRINTLN(")")
pinMode(A_ENABLE_PIN,OUTPUT); // Enable
pinMode(A_STEP_PIN,OUTPUT); // Step
pinMode(A_DIR_PIN,OUTPUT); // Dir
digitalWrite(A_ENABLE_PIN,HIGH); // Set !Enable high
DEBUG_PRINT("# Stepper B : (E:")
DEBUG_PRINT(B_ENABLE_PIN)
DEBUG_PRINT(",S:")
DEBUG_PRINT(B_STEP_PIN)
DEBUG_PRINT(",D:")
DEBUG_PRINT(B_DIR_PIN)
DEBUG_PRINTLN(")")
pinMode(B_ENABLE_PIN,OUTPUT); // Enable
pinMode(B_STEP_PIN,OUTPUT); // Step
pinMode(B_DIR_PIN,OUTPUT); // Dir
digitalWrite(B_ENABLE_PIN,HIGH); // Set !Enable high
}
void loop() {
DEBUG_PRINTLN("# Ready waiting Serial input")
if(Serial.read() != -1){
letterF(xpen0,ypen0);
traceligne(xpen0,ypen0+100,xpen0+100,ypen0+100);
letterA(xpen0+100,ypen0+100);
traceligne(xpen0+150,ypen0+100, xpen0,ypen0);
}
start = false;
}
void letterF(float x0,float y0) {
traceligne(x0,y0,x0+50,y0);
traceligne(x0+50,y0,x0,y0);
traceligne(x0,y0,x0,y0+50);
traceligne(x0,y0+50,x0+50,y0+50);
traceligne(x0+50,y0+50,x0,y0+50);
traceligne(x0,y0+50,x0,y0+100);
}
void letterA(float x0,float y0) {
traceligne(x0,y0,x0+12.5,y0-50);
traceligne(x0+12.5,y0-50,x0+37.5,y0-50);
traceligne(x0+37.5,y0-50,x0+25,y0-100);
traceligne(x0+25,y0-100,x0+12.5,y0-50);
traceligne(x0+12.5,y0-50,x0+37.5,y0-50);
traceligne(x0+37.5,y0-50,x0+50,y0);
}
void traceligne(float x0, float y0, float x1, float y1) {
point origin;
point destination;
point originAB;
point destinationAB;
DEBUG_PRINT("# TraceLigne : (")
DEBUG_PRINT(x0)
DEBUG_PRINT(",")
DEBUG_PRINT(y0)
DEBUG_PRINT(")(");
DEBUG_PRINT(x1)
DEBUG_PRINT(",")
DEBUG_PRINT(y1)
DEBUG_PRINTLN(")");
origin.x = x0;
origin.y = y0;
destination.x = x1;
destination.y = y1;
originAB = convert2ABcoord(origin);
destinationAB = convert2ABcoord(destination);
moveAB(originAB,destinationAB);
}
void moveAB(point p0, point p1) {
DEBUG_PRINT("# Move AB : (")
DEBUG_PRINT(p0.x)
DEBUG_PRINT(",")
DEBUG_PRINT(p0.y)
DEBUG_PRINT(")(");
DEBUG_PRINT(p1.x)
DEBUG_PRINT(",")
DEBUG_PRINT(p1.y)
DEBUG_PRINTLN(")");
float dA = p1.x - p0.x;
float dB = p1.y - p0.y;
bool Adir = (dA >= 0) ? true : false;
bool Bdir = (dB >= 0) ? true : false;
unsigned long Astep = abs(dA) * STEPS_PER_mm_A;
unsigned long Bstep = abs(dB) * STEPS_PER_mm_B;
DEBUG_PRINT("# AB Steps : ")
DEBUG_PRINT(Astep)
DEBUG_PRINT(",")
DEBUG_PRINTLN(Bstep)
if(Astep == 0) StepB(Bdir, Bstep);
else {
if(Bstep == 0) StepA(Adir, Astep);
else {
float k = (float) Bstep / (float)Astep;
unsigned long AstepStatus = 0;
unsigned long BstepStatus = 0;
float cerror = 0;
float error = 0;
unsigned long nstep = 0;
if(k>=1) {
nstep = k;
error = k - nstep;
while(AstepStatus < Astep) {
StepA(Adir, 1);
cerror += error;
if(cerror >= 1) {
int missingsteps = cerror;
cerror -= missingsteps;
StepB(Bdir, nstep + missingsteps);
}
else {
StepB(Bdir, nstep);
}
AstepStatus ++;
}
}
else {
k = 1 / k;
nstep = k;
error = k - nstep;
while(BstepStatus < Bstep) {
StepB(Bdir, 1);
cerror += error;
if(cerror >= 1) {
int missingsteps = cerror;
cerror -= missingsteps;
StepA(Adir, nstep + missingsteps);
}
else {
StepA(Adir, nstep);
}
BstepStatus ++;
}
}
}
}
}
point convert2ABcoord(point coord) {
point res;
float px0 = pow(coord.x,2);
float py0 = pow(coord.y,2);
float pwx0 = pow((W-coord.x),2);
res.x = sqrt(px0 + py0);
res.y = sqrt(pwx0 + py0);
return res;
}
void StepA(bool dir, unsigned long nStep) {
#ifdef DIR_REVERSE_A
DEBUGSTEPPER_PRINTLN("# Stepper A : Reverse direction")
Step(!dir, A_DIR_PIN, A_ENABLE_PIN, A_STEP_PIN, nStep);
#else
DEBUGSTEPPER_PRINTLN("# Stepper A : Normal direction")
Step(dir, A_DIR_PIN, A_ENABLE_PIN, A_STEP_PIN, nStep);
#endif
}
void StepB(bool dir, unsigned long nStep) {
#ifdef DIR_REVERSE_B
DEBUGSTEPPER_PRINTLN("# Stepper B : Reverse direction")
Step(!dir, B_DIR_PIN, B_ENABLE_PIN, B_STEP_PIN, nStep);
#else
DEBUGSTEPPER_PRINTLN("# Stepper B : Normal direction")
Step(dir, B_DIR_PIN, B_ENABLE_PIN, B_STEP_PIN, nStep);
#endif
}
void Step(bool dir, int dirPin, int enablePin, int stepPin, unsigned long nStep) {
DEBUGSTEPPER_PRINT("# Stepper : (")
DEBUGSTEPPER_PRINT(dir)
DEBUGSTEPPER_PRINT(",")
DEBUGSTEPPER_PRINT(nStep)
DEBUGSTEPPER_PRINTLN(")")
digitalWrite(enablePin,LOW);
if(dir) {
digitalWrite(dirPin, LOW);
}
else {
digitalWrite(dirPin, HIGH);
}
for(unsigned long i=0; i < nStep; i++) {
digitalWrite(stepPin,HIGH); // Output high
delayMicroseconds(STEP_DELAY); //delay(STEP_DELAY); // Wait
digitalWrite(stepPin,LOW); // Output low
delayMicroseconds(STEP_ENDDELAY); //delay(STEP_ENDDELAY); // Wait
}
digitalWrite(enablePin,HIGH);
Summary :
This part was really fun, except the code who was really tricky. More informations about the next part can be found in our BXL group page