WEEK 5
3D SCANNING AND PRINTING
WEEK ASSIGNMENT
Design and 3D print object that could not be made subtractively
3D scan an object
For this week assignment I tried to use different kind of scanning technologies with the aim of finding its differences and the possibilities of each one. I also tried 2 types of 3D printing one using a Multimaker 3D printer with PLA and other using a Digitalwax wax 3D printer.
You can download the files HERE
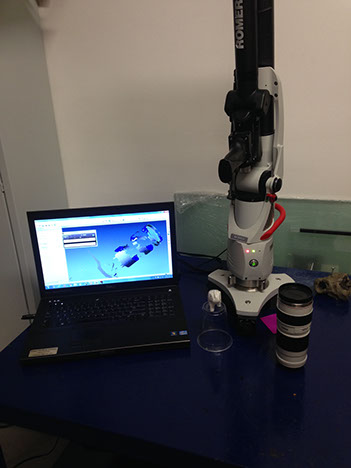
For the 3D scanning assignment I used 3 different methods, my first attempt to scan something was done with a Romer arm, it has a great definition because it generates a cloud of points which detects small details with great accuracy, however I had some problems with the object I wanted to scan due its shiny surface, that makes almost impossible to scan the object therefore, it is important to use some kind of special coating.
THE PROCESS

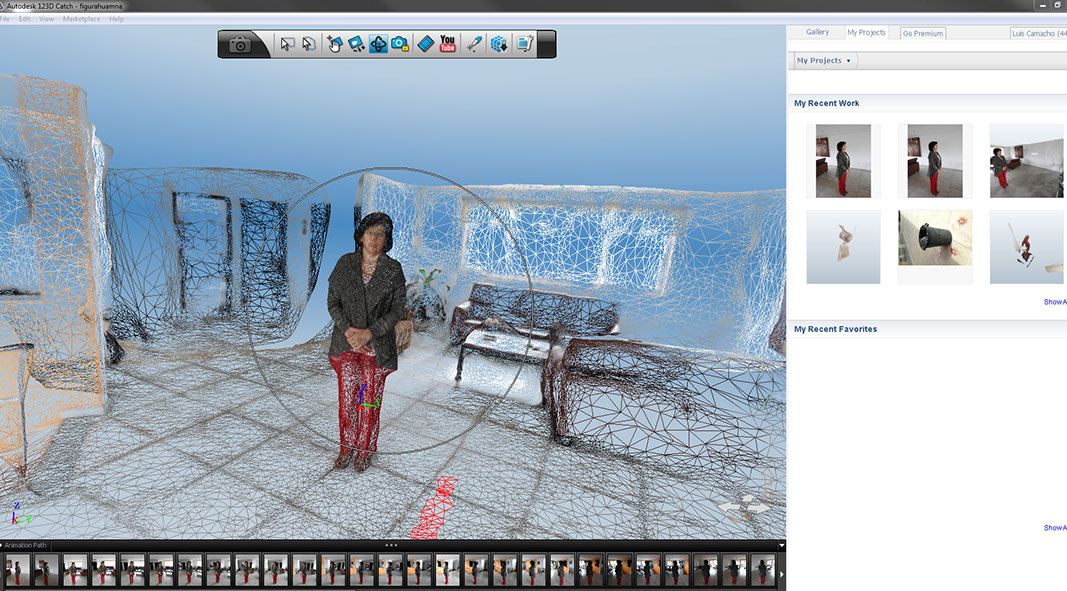
123 Catch was very easy to use, however, I would recommend some things:
-Be careful with the environmental lighting because it can affect the quality of the scanning due this system works joining the taken pictures and creating meshes based on the shadows of the images.
-For small objects draw a path on a sheet of paper and put it under the object you want to scan, this path will help 123 Catch to join the pictures properly
-For big objects don't try to hide the background it is important for the software process of joining the pictures, you can erase it when the process is completed.

Foco2 by luisgestaltung on Sketchfab



7 - 7
<
>
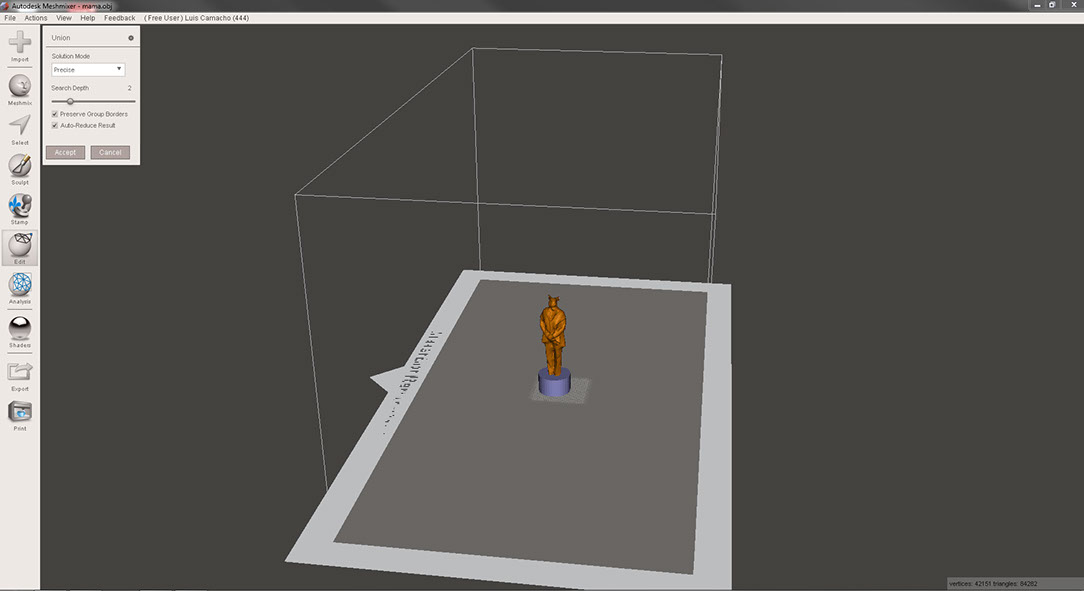
If you want to scan people it is important to ensure that the model won't move because that will ruin the process, for this scan I took around 50 pictures, then I erased the background in the 123D Catch software and exported the file in .obj format to Meshmaker to make some funny changes.
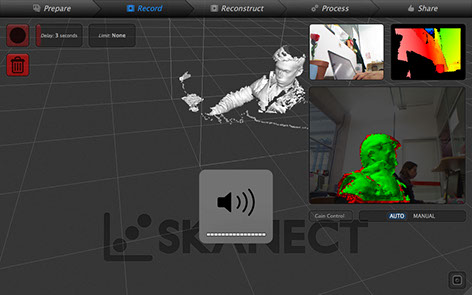
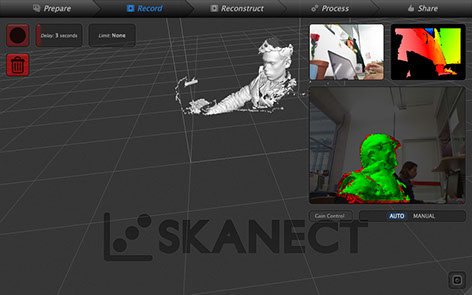
I also used the Skanect software connected to my kinect it is pretty similar to the Romer arm technology but with much less resolution, however, it generates great outputs. It is important to keep control of the kinect otherwise the scan won't work, also the dimensions of the "virtual cage" must be as accurate as possible so the cloud of points spread properly in the space.

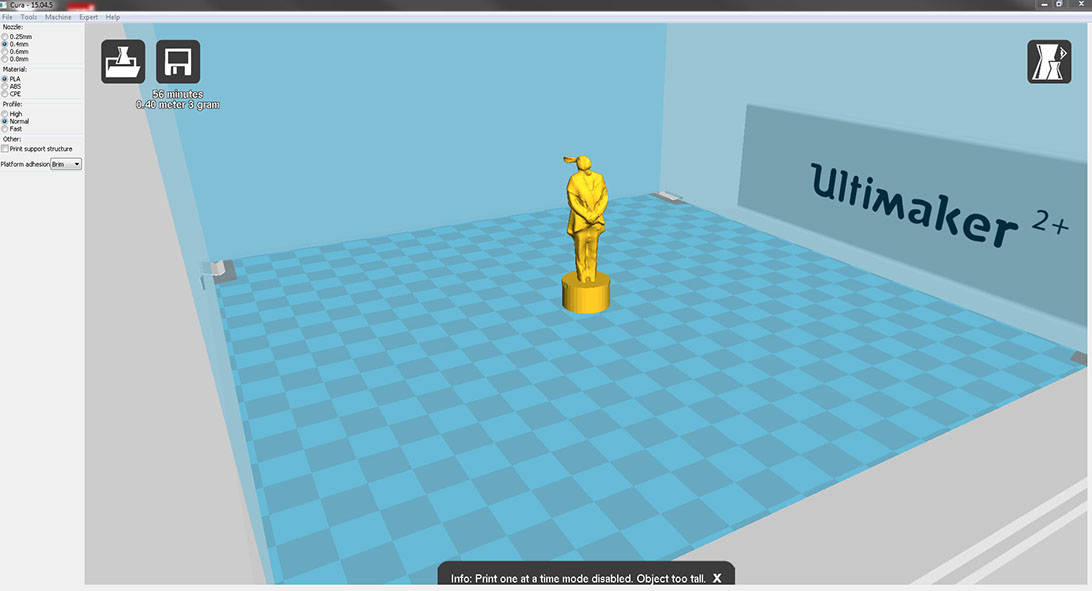
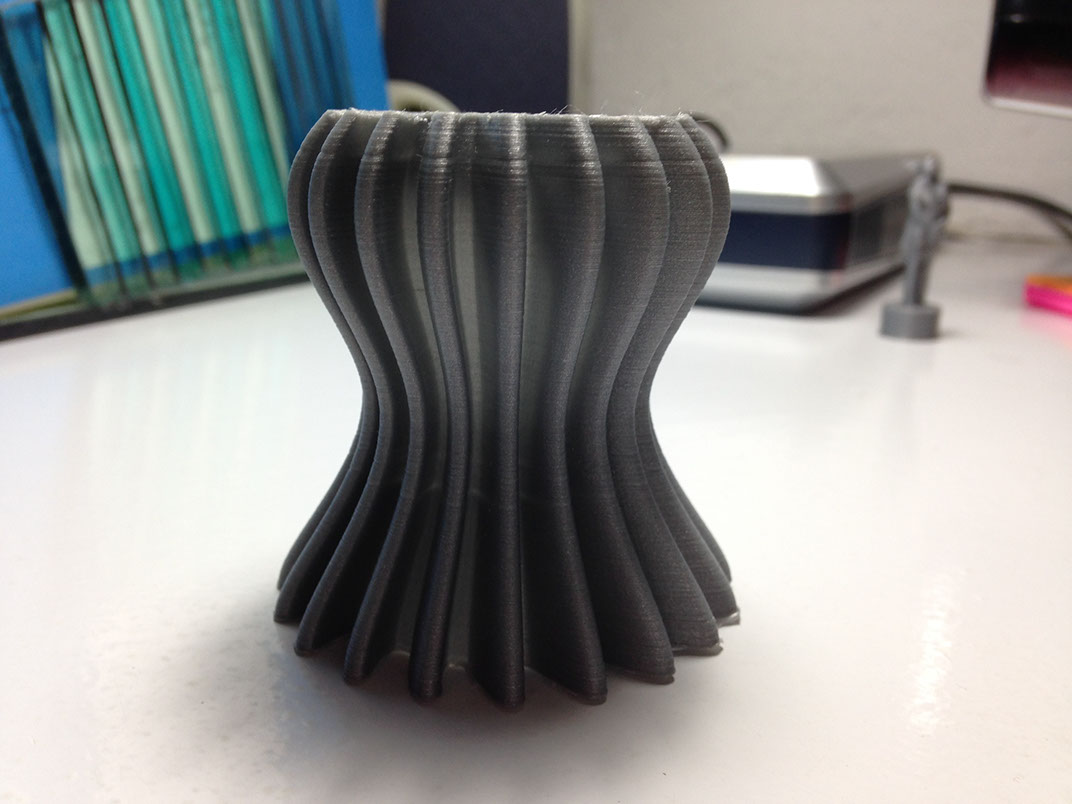
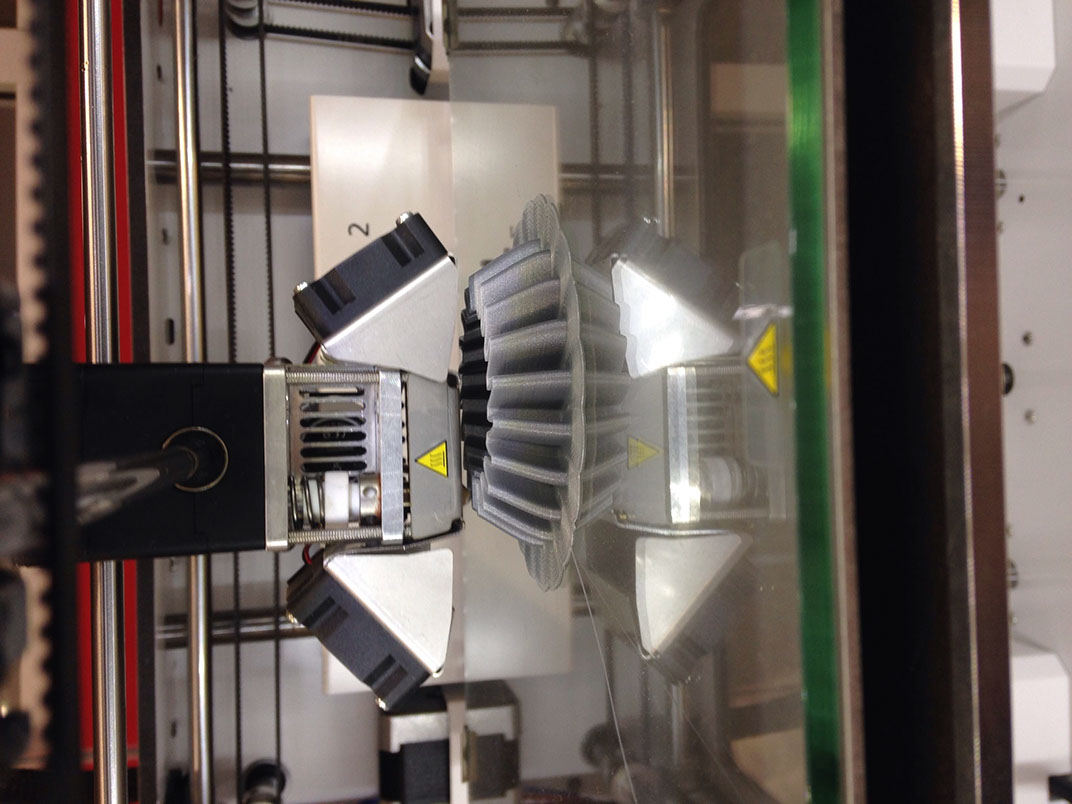
For the 3D printing I used a multimaker machine with PLA filament and a Digitalwax 008 3D printer. Both models were designed in Rhino. For the Multimaker 3D printer I used Cura software to create the G code it was a 4 hours process on a medium quality.
For the wax 3D printer the softer used was NAUTA+ and it was a 5 hour process.
3D printing has a lot of issues some of them related to the geometry you whant to print, others related to the kind of material you will be using, also the type of 3D printer you will use is importatn to the kind of project you will be developing, for example I would not recommend using a makerbot for a project in which high resolution is crucial.



8 - 8
<
>
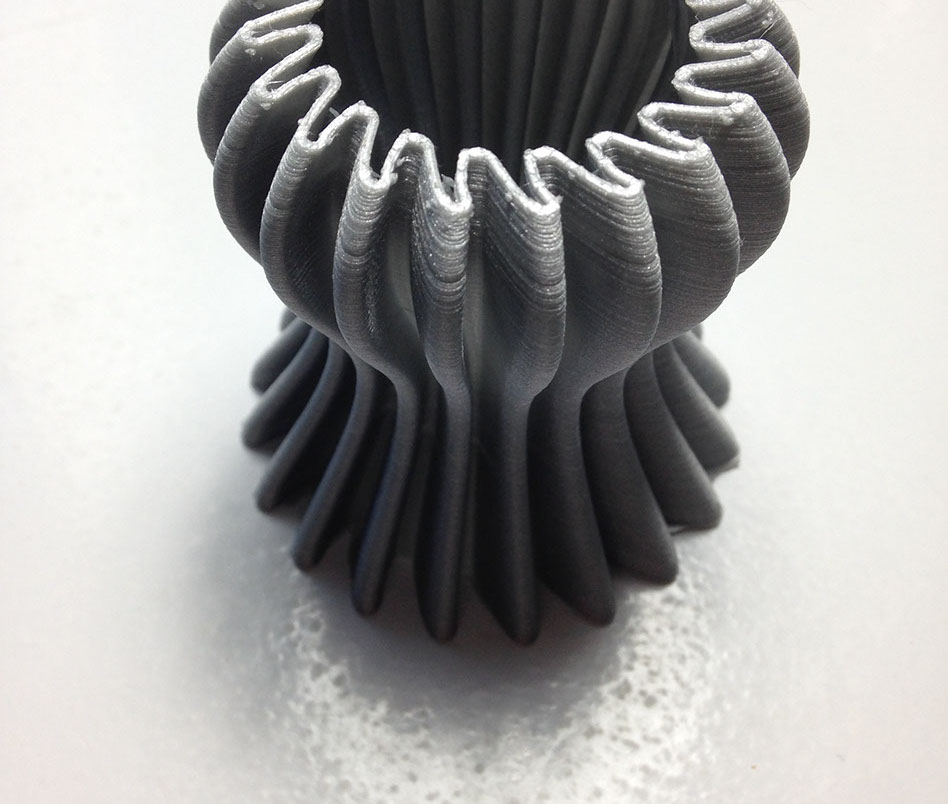
The design that I 3D printed can not be made subtractively because the folowing aspects:
-The curves direction
-The way the curves flow
-The depth of the grooves
-The position of the rounded edges
I used Rhino to model this piece, first I drew a circumference with a 5mm radius, then I drew one curve with a shape similar to a fin and then I copied and repeated this curve all around the circumference with the tool Polar array, once I got the desired pattern I changed to the front view and I drew a curve with the shape I wanted my first drawing to follow then I mirrored that curve and I used the tool flow along a curve, using as reference the curves I drew in the front view, and "voila" my 3D model was almost ready.
After having the surface ready I had to offset it to make it a solid.

