Mechanical Design/Machine Design/a>

I involved in the design and construction of the machine fabLAB ESAN ( MACHINE_DESIGN )

I could use MatLab to generate the points, duplicating one data in the python script to compensate for using two x-axis stages
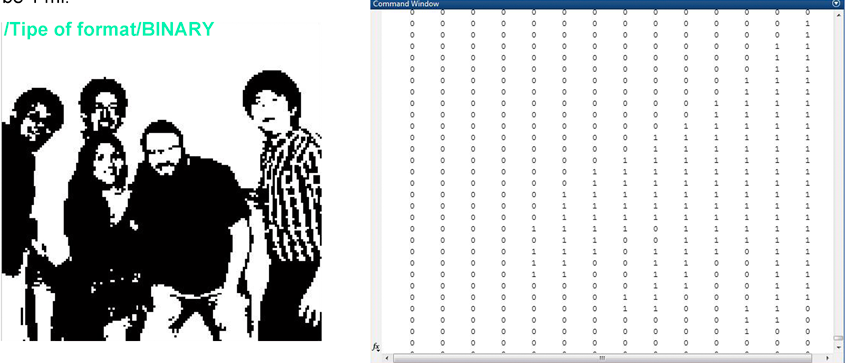
After having the image in black and white, the code transform the image into bynary format so we have all points black and white thet generate the image, in our case the size of the image is grayscale into 100px X 100px and we have a total of 4634 graphing oints and the resolution of the machine will be 1ml

As a result of this, I got a sort of pixel-art reproduction of the image based on the points sent to it. But we still needed to get a proper effector to paint. We first tried one of the spare carboard pieces we had to insert a sharpie in it and pasted it into the machine using masking tape, it would draw a little, but we needed a better way.
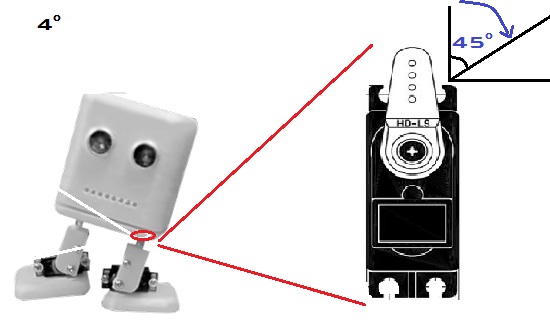
About my final project, I use
-Micro Servo
-Weight: 9 g
-Dimension: 22.2 x 11.8 x 31 mm approx.
-Stall torque: 1.8 kgf·cm
-Operating speed: 0.1 s/60 degree
-Operating voltage: 4.8 V (~5V)
-Dead band width: 10 μs
-Temperature range: 0 ºC – 55 ºC
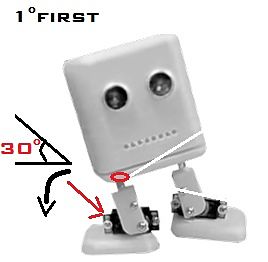
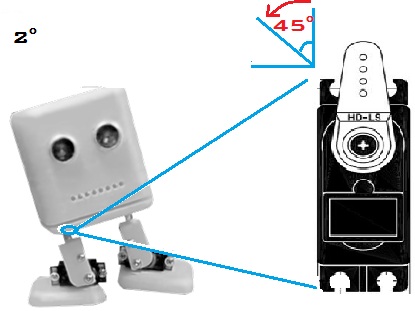
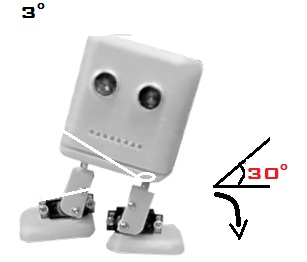
for moving the robot I used four servo motors, and the sequence of operation makes the robot walk, below show the sequence and approximate angles of inclination, the program code and use are in the documentation of the final project
-Micro Servo
-Weight: 9 g
-Dimension: 22.2 x 11.8 x 31 mm approx.
-Stall torque: 1.8 kgf·cm
-Operating speed: 0.1 s/60 degree
-Operating voltage: 4.8 V (~5V)
-Dead band width: 10 μs
-Temperature range: 0 ºC – 55 ºC