As I am working on a proposal for an exhibition space in Milan, I would do as my final project for the Fab Academy a conceptual model that will show how I conceive that exhibition space and how different configurations of it can be set.
For having different configurations of the space it was very important to know the different systems that already exist. I based my work on the stenographic techniques used in the theatres but in my case the scene is meant to be seen from many points of view, this makes the observer being participant of it.
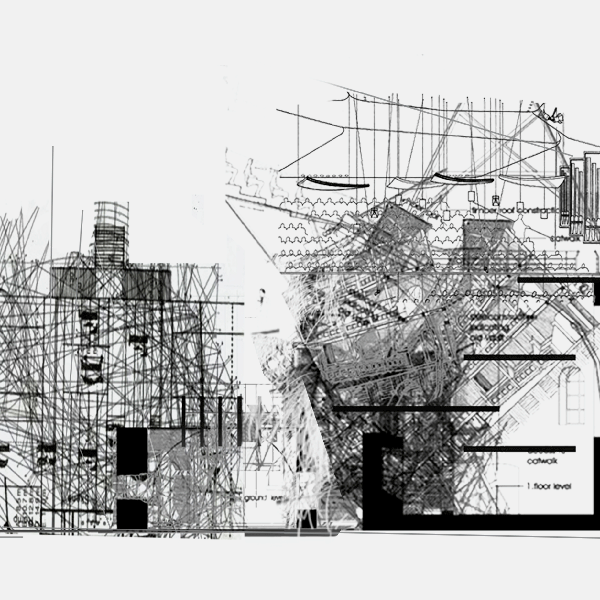
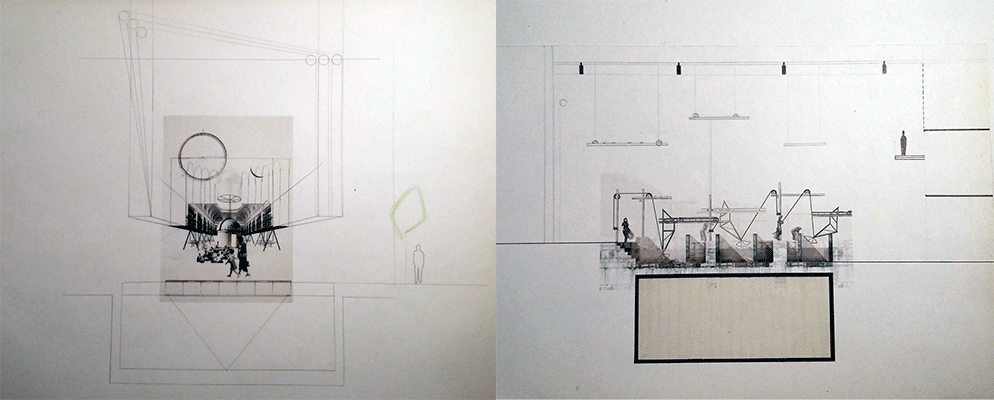
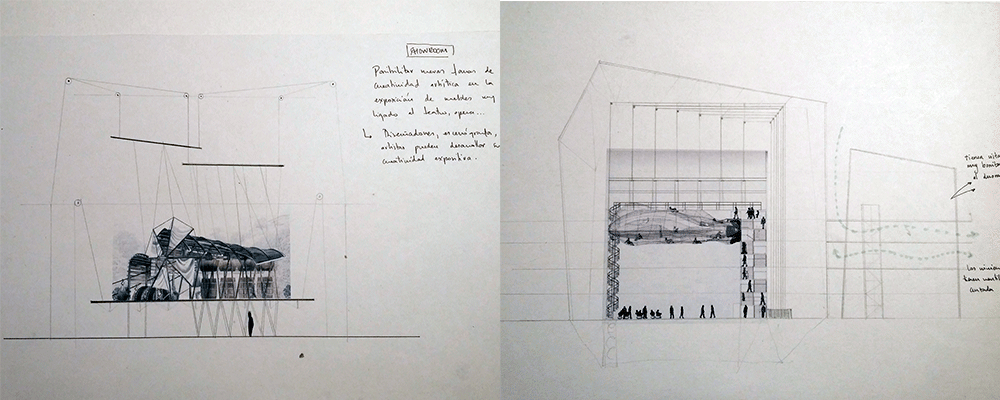
These conceptual photomontages show how I imagined the different possibilities for the space:
INPUT
As I wanted the observer to be a participant of that scenography I thought about creating a mobile territory in which the space changes with the movement of the observer, a choreography between the object and the people. For this the scene had to be connected to some motors that activates the plot with a presence sensor.
I reached the conclusion to use the step response sensor, this sensor detect the presence of the people by measuring voltage changes and activates an output, in my case a motor.
OUTPUT
The next step was to see how the scenographic techniques worked in the theatres and the different types of motors used. The motors used vary depending on the things that are going to be hanged from them and how you want to move them. There are two types of engines:
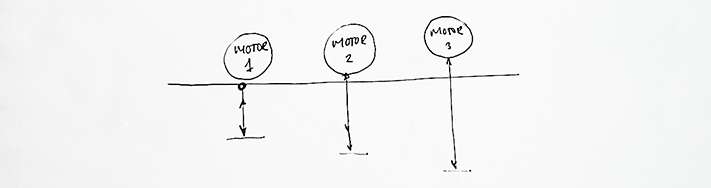
Punctual hoist motor:
Lifting platforms: Lifting platforms make it possible to move the stage floor in vertical direction both up and down. They are used for changing the stage floor or for moving parts of the stage set to another position. They are always at the same height and they can be activated at the same time with one motor through a pulley system

Posibilities with both types of hoisting engines:
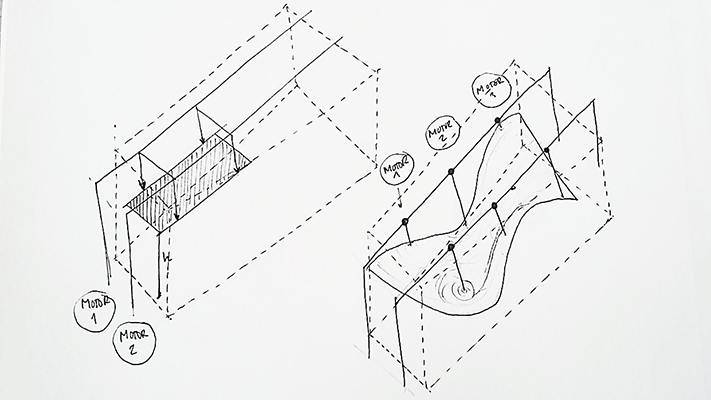
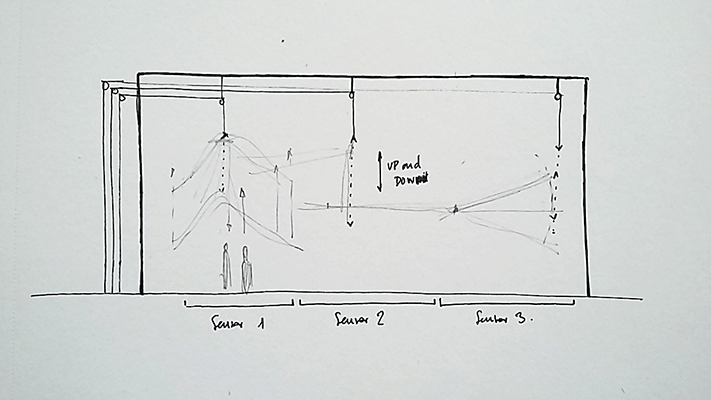
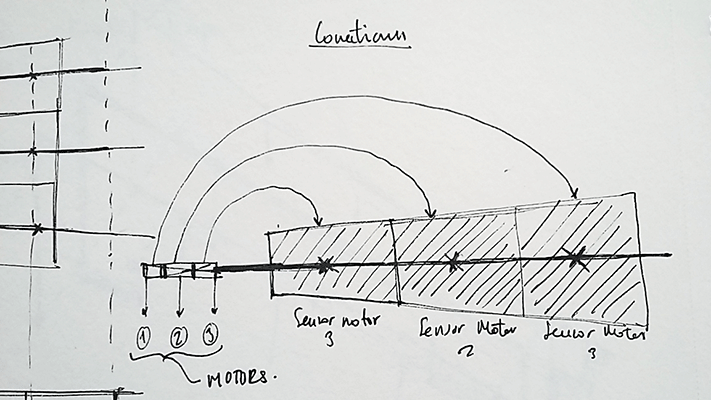
I decided to used punctual hoist motor because it let more freedom of movement when creating different spaces and doesn’t force things to be at the same height In the next drawing you can see how affects the type of system to the space.
Once I knew how I wanted my motors to be I had to see which motors fitted best with my prototype in order to construct it. I studied the different motors that Neil showed us in lesson 13 “Output devices” and what became clear after having studied them was:
Servo motors: The servos do not rotate freely as a standard motor, but the angle of rotation is limited to 180 degrees back and forth. As this kind of engines has a limited rotation did not serve me for my project.
DC motors: (direct current) has two wires, one power or positive and the other ground or negative, are continuously rotating motors. When connected to the electric motor will start turning until that power is removed. Most DC motors operate at a high rpm. I discarded the possibility of using this type of motor because I could not controlled the position.
Stepper motors: A stepper motor is essentially a servomotor which uses a different method of motorization. These motors use multiple electromagnets arranged around a central gear to define its position . Each rotation of an electromagnet is called a "step " and therefore the motor can rotate precise angles predefined step through a full 360 degree rotation .
As I wanted to controlled the movements (the steps) of my motor I decided to use the stepper motor as the hoist system of my project.
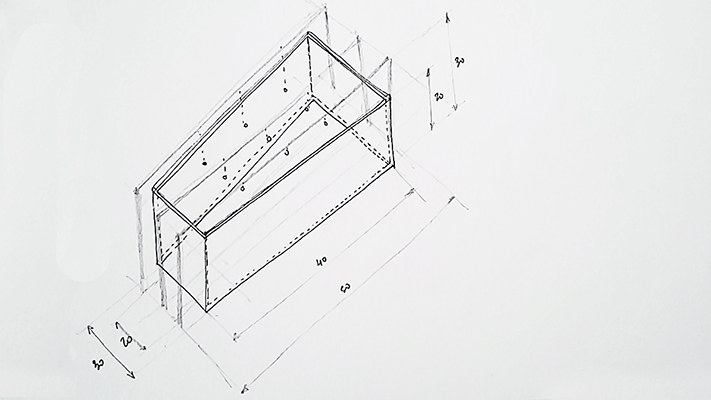
STRUCTURE
I thought of doing the structure with the Laser cut machine. As I used the machine for cutting wood and I haven’t done anything with acrylic I decided to do the structure in this material, this way I know how to work with it in the Laser cut machine. I decided using this material also thinking on the aesthetic of the final result, I thought it would be more attractive the model.
ELECTRONICS
The electronic part will be very simple. It will consist of four different boards connected by I2C. The master one will be the sensor board that will receive changes from the sensors and will send the data to the slave boards (motor ones) and depending on the this data the motor boards will activate or deactivate the motors.
