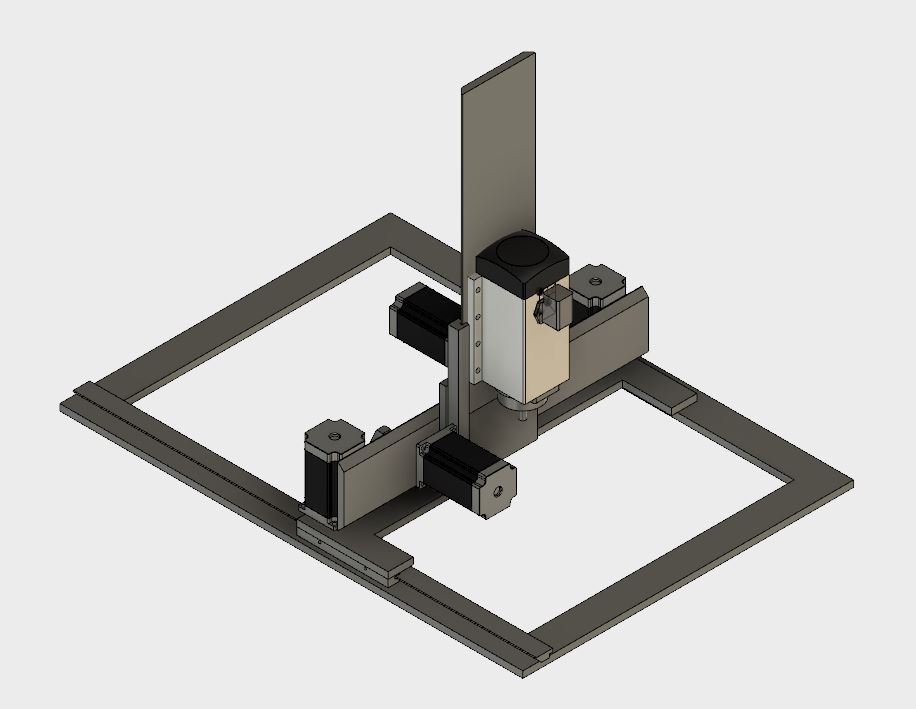
- Build (parts of?) the motion system in MDF, move it by hand
- Make the motion system in Alu and POM
- Test the motors
- Mount the motors, run them manually (7 June: Video of motors driving the motion system.)
- Test the spindle at fixed speed from the VFD
- Mount the spindle
- Mount limit switches
- Make the wiring harness and route the cables
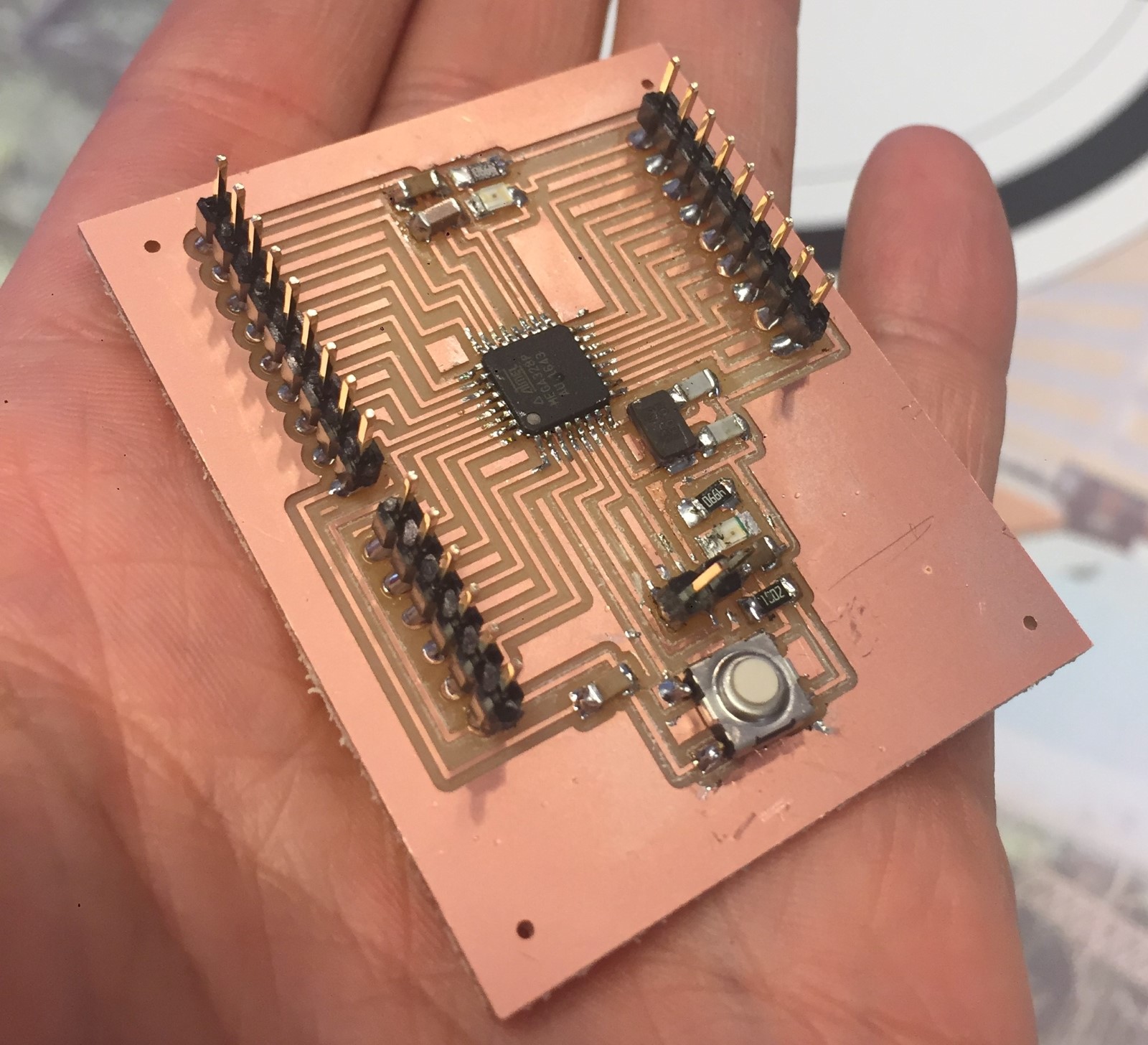
- Make my controller run GRBL (ordered 16Mhz crystal if 20Mhz compilation seems complicated.)
- Make my connection shield. (Satshakit version: .brd .sch)
- Make three more stepper drivers. Plan B: Borrow commercial stepper drivers
- Wire up all electronics and test with computer controlled motion
- Spindle PWM to RPM control via the VFD Plan B: If this is too time consuming, finish it later.
- Make a shipping case and fit everything
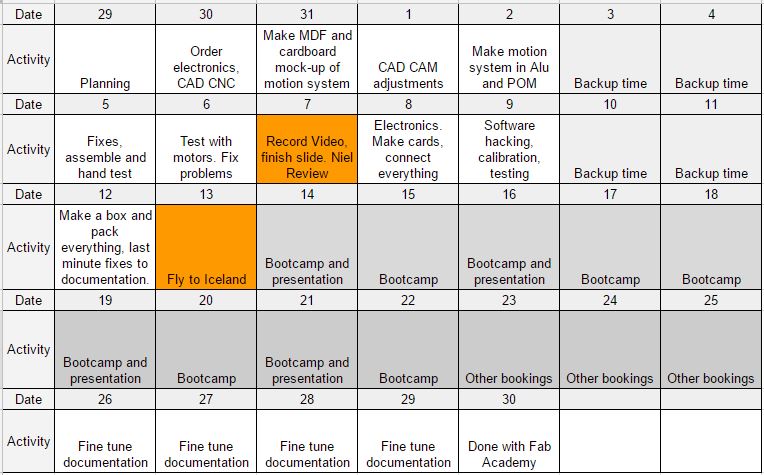
- Go to Iceland, use it in bootcamps!
- Present to the Fab lab network
- Dust protection for the glide rails
- Tune the motion system
- Complete and fine tune my manual jogging interface
- Build a Z-height probing spot
- If it is heavier than 20kg, lighten it for cheaper shipping
- Add dust extraction
- Make easy to use mounts for different stocks
- Adapt the shipping case to be a dust and noise enclosure.
After the presentation or bonus tasks:
Plan B for saving time on stepper driver production
If I run into troubles with my home-made stepper driver or just lack the time to make three more then I'll borrow commercial stepper drivers and replace them with fabbed ones later.
UPDATE: I activated Plan B. I use my own stepper driver for the X-axis and three makeblock stepper drivers for the other axis.
-
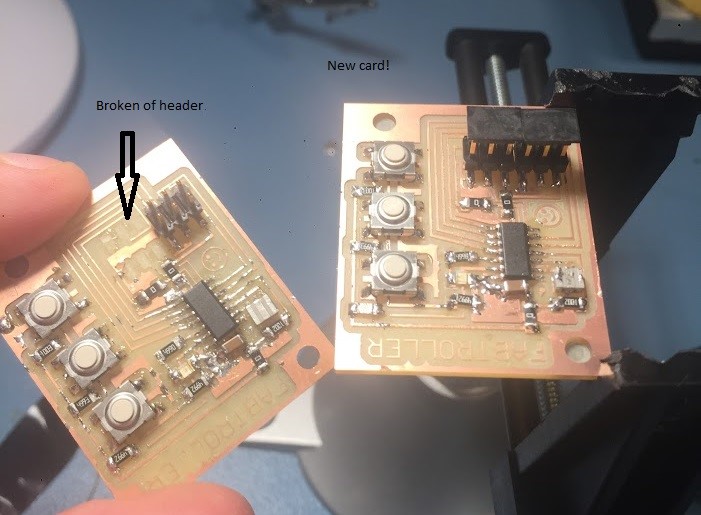
Does my Stepper driver work as intended? Before making more. Do I still have time to make more before the end of the course?
Answer: It seems to work ok, but I would like to do some updates to the design before I make more of them. See my Output devices week10 page for a list of my future updates. - Can I run GRBL on my satshakit v2?
Answer: Yes, no problems at all after I changed to a 16 Mhz crystal - Does my spindle, PSU and motors work?
Answer: Yes!
- 2D elements?
- Circuit board milling
- Motion system milling
- Case milling
- Idea: Viny cut markings for axis directions, safety text etc?
- 3D elements?
- Moulds for electroics enclosure
- Chamfer on glide rails
- 3d printed cable holders and "poke-protection" for the 220V incoming power.
- Electronics?
- Controller based on updated Satshakit
- Stepper drivers based on updated Satstep6600
- Jogging and serial communication card
- Connections shield
- Input switches
- Wiring harness
- Addative techniques?
- Composite electronics enclosure
- 3d printed cable holders and "poke-protection" for the 220V incoming power.
- Subtractive techniques?
- Milling the motion system and case.
- My work can be replicated and built on by using my files?
- The manufacturing processes used are documented?
- The raw materials and purchased components are listed in a bill of materials with prices?
- Machining time and machines use is presented?
- It is clear what work was done beforehand by others?
- The CNC plaform accepts digital commands from my computer and moves when I want it to?
- I can fit it inside a box that I can send as checked in luggage? (Width+Length+Heigh = less than 1580mm.)
- Weights below 20-23 kg? (So that I can check it in without paying extra in most airlines. Less than 23kg = most airlines, less than 20 kg = all airlines.)
Have I in my final project shown that I can design and make::
Have I documented my work so that:
Is the integration of the subcomponents successful so that:
Bonus Goal:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}