09 - mechanical design
The group documentation for this week can be found here
The group documentation for the finished machine can be found here
During this week’s assignment we had to design and make a machine that we operate by hand and will later automate. This was a group assignment and I worked together with Blanca Rosas on this machine.
The concept for this machine was to build a machine that can either sort or pick and place LEGO bricks. We quickly decided to use Nadya Peek’s reconfigurable stages for this project and used those as the leading design for our machine.
This is my individual contribution to this week's assignment:
STEPS:
In short the steps we took where:
01 - concept and visualisation
02 - building the stages
03 - building structure around the stages to keep them in place
04 - making a gripper
05 - designing a bed
06 - final assembly
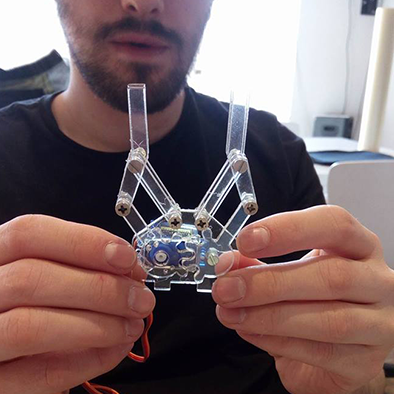
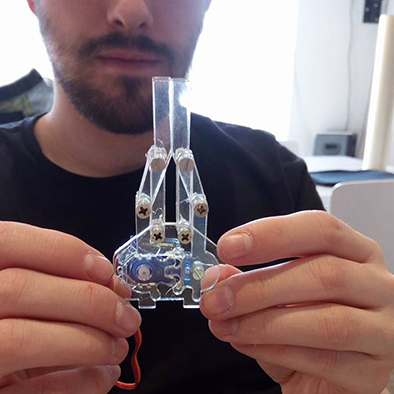
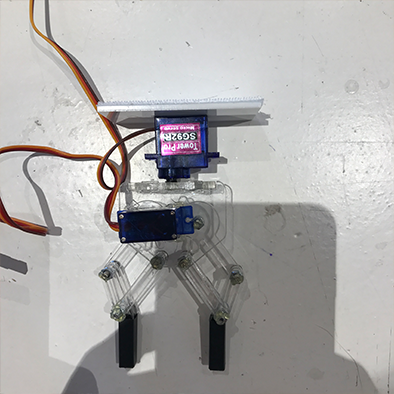
04 - making a gripper
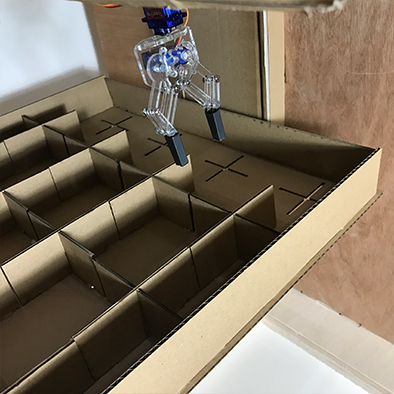
I worked on a mechanical gripper that can pick up bricks using a servo motor, I used this file from Thingiverse as the basic design. After laser cutting it out of 3mm acrylic I hacked some pieces together to make it more compact, make the servo fit better and I added shrink tubing around the end to give it a better grip.

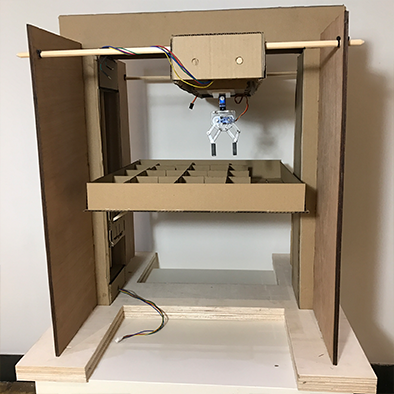
05 - designing a bed
I also designed and built the bed of the machine, because the machine needs to hold a wide variety of parts and we wanted it to be reconfigurable we designed a bed that allows various dividers to be placed to create either small or big pockets.
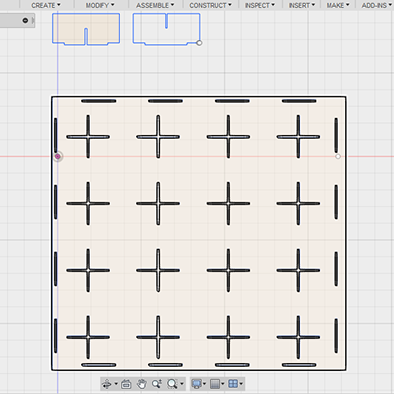

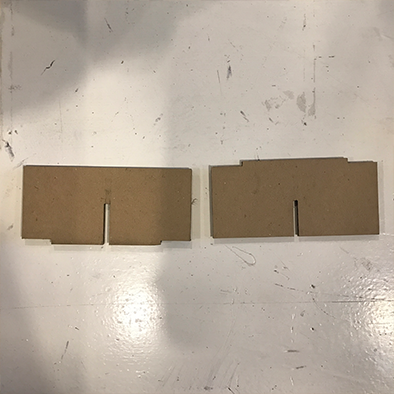
The bed rests on a wooden support that we drilled screws through to grip through the cardboard.


bed DXF

gripper DXF
base DXF