

Week 8 - Eembedded programming
![]()
![]()
![]()
Assignment
and programming environments as possible
![]()
![]()
With programming iam not very familar with. I had electrical engineering while studying, but that is very long ago. For this topic of the electronics development, as well as the programming, I really have to start at zero.
The main task of embedded programming is the microprocessor you will use or you want to deliver a package.
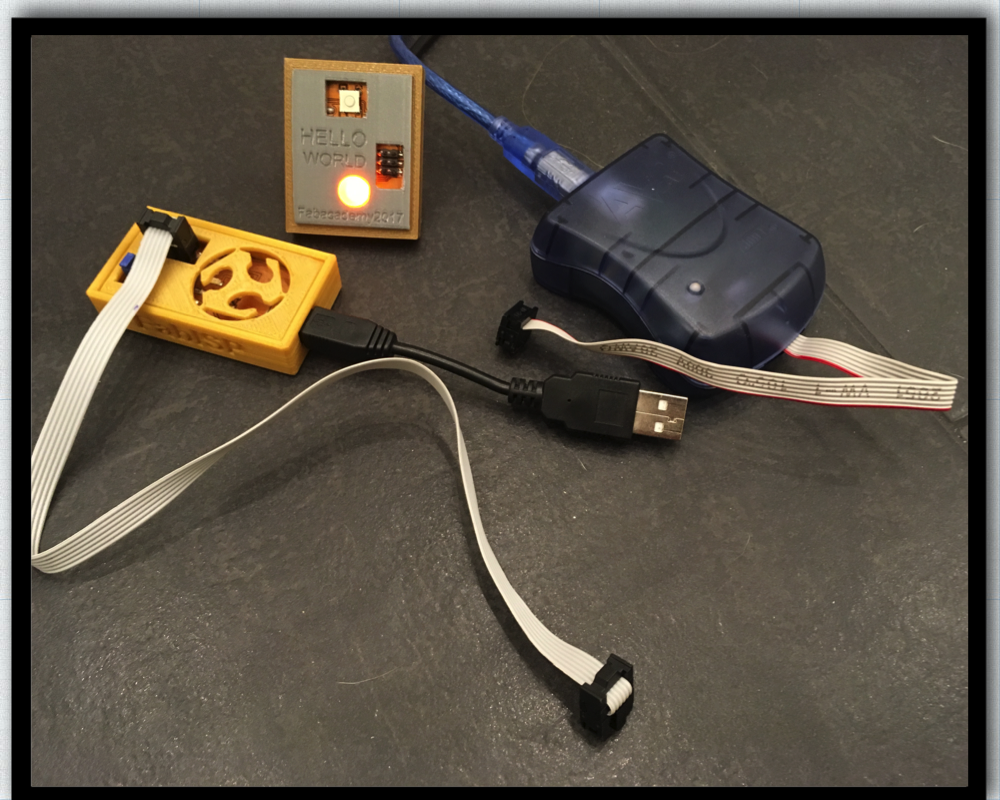
My board design is based on the fabacadamy's 6th electronics design explanations two weeks ago from Fabacademy Tutorial website. I added a LED and an 20MHz resonator to my board.
Now I have to program my board through my programmer, which we have made in the 4th week.
![]()
What information I have put together from the ATtiny44 Datasheet:
ATtiny44 Datasheet:
Overview
The Atmel ATtiny24/44/84 is a low-power CMOS 8-bit microcontroller based on the AVR enhanced RISC architecture. By executing powerful instructions in a single clock cycle, the Atmel ATtiny24/44/84 achieves throughputs approaching 1MIPS per MHz allowing the system designer to optimize power consumption versus processing speed.
![]()
including: C Compilers, Macro Assemblers, Program Debugger/Simulators and Evaluation kits.
The device is manufactured using Atmel´s high desity non-volatile memory-technology. The on-chip
ISP Flash allows the program memory to be re-programmed in-system through an SPI serial interface, by a conventional non-volatile memory programmer or by an on-chip boot code running on the AVR core.
![]()
![]()
Pin configuration Explanations from the Datasheet (page 60-65 in the Datasheet):
Possible PWM (Pulse Width Modulation) is on PA5,PA6 and PA7 and PB2. PWM you need for Informationtransfer and often to regulate the conversion of energy into technical systems.
![]()
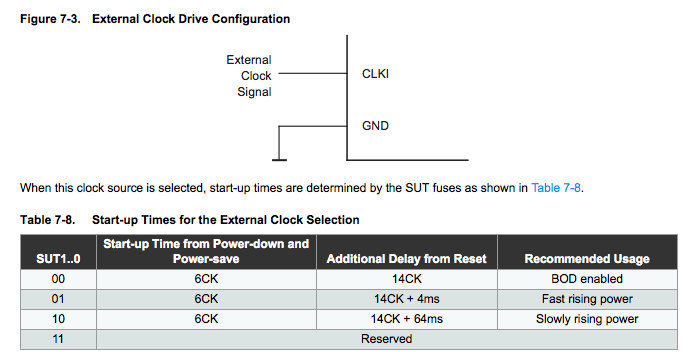
External Clock
To drive the device from an external clock source, CLKI should be driven as shown in Figure 7-3. To run the device on an external clock, the CKSEL fuses must be programmed to “0000”.
![]()
Thinks I like to know more:
How to Reset?

![]()
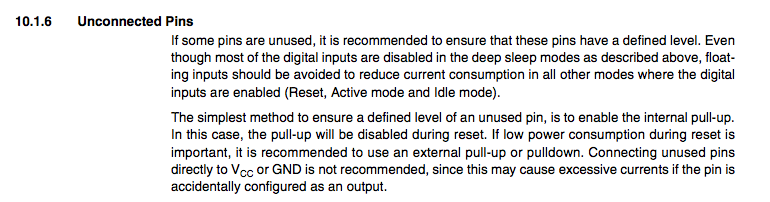
What happen with unconnected pins?
![]()
What does MISO, MOSI and SCK means?
On the following photo you can see the Pin Configuration of the ATiny24/44/84
My LED with a 330 Ω resistor is on Pin PA7 (blue underlined); the Button with the 10 kΩ Resistor is on Pin PA3 (red underlined).
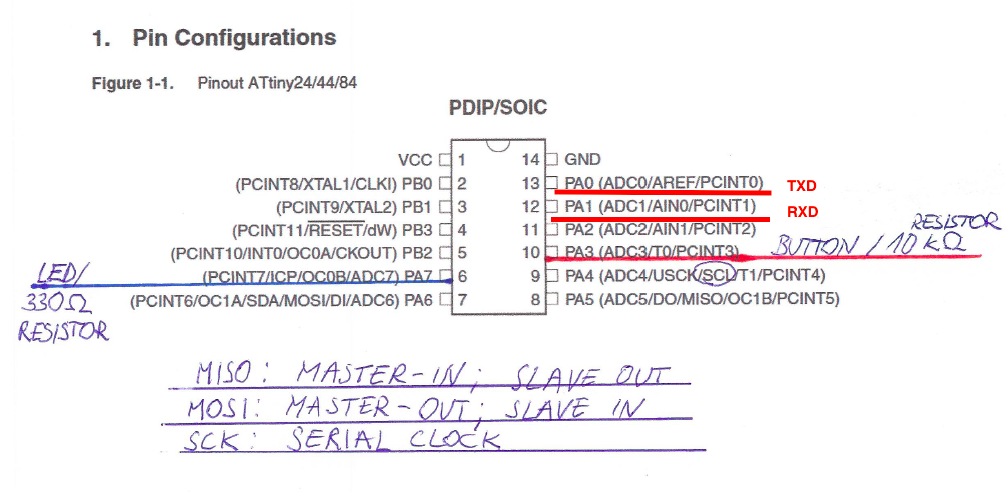
Furthermore, I describe on this sketch what the terms MISO, MOSI and SCK mean.
![]()
What problems I had ?
Sometimes my programmer from electronics production wasnt recognized by my computer. To solve this Problem, I pull the usb-cable out of my omputer and plug it in again. Furthermore my pc could not find the ftdi-cable at first. this problem I solved with the right driver for the ftdi-cable the prolific driver.
![]()
![]()
Software I used:
AVR DUDE is a command line tool with Functions include:
![]()
I ordered a cable a COM-FOUR PL2303HX USB zu TTL RS232 COM cabel-Modul Konverter to read the serial signal USB to TTL cable for 7 € from Amazon.

![]()
![]()
Programming the board:
![]()
The main.c for LED-Blinking example:
//main.c AtTiny44 Program
#include <avr/io.h>
#include <util/delay.h>
#define F_CPU 16000000
#define BUTTON_PRESSED (PINA & (1<<PA3)) // check for button press
#define LED_ON PORTA |= (1 << PA7) // turn LED on code
#define LED_OFF PORTA &= ~(1<< PA7) // turn LED off code
typedef unsigned char BYTE;
typedef unsigned short WORD;
void signal(){
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
LED_ON;
_delay_ms(500);
LED_OFF;
_delay_ms(500);
}
int main (void) {
// declare PA0 as output pin. This is where the motor and LED is connected
DDRA = (1 << PA7);
DDRA |= (1 << DDA3); // using A3 as button input
PORTA |= (1 << PA3); // pull-up resistor
// main loop
while (1) {
if (!BUTTON_PRESSED){
signal(0);
}
}
return 1;
}
![]()
![]()
Video 2:
![]()
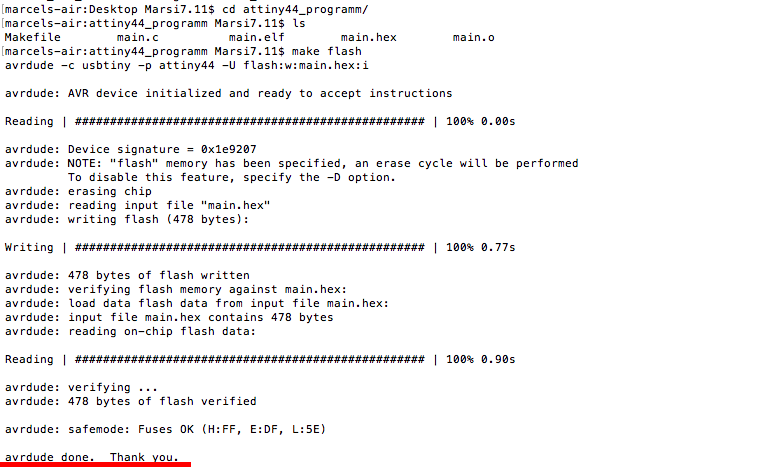
Go over the terminal into the directory in which the program file (Makefile and main.c you find in the download section) and the make file lies and type "make flash":
![]()
If at the end of the process "avrdude done. Thank you" (as marked as red appears), everything has been properly flashed on the chip
![]()
![]()
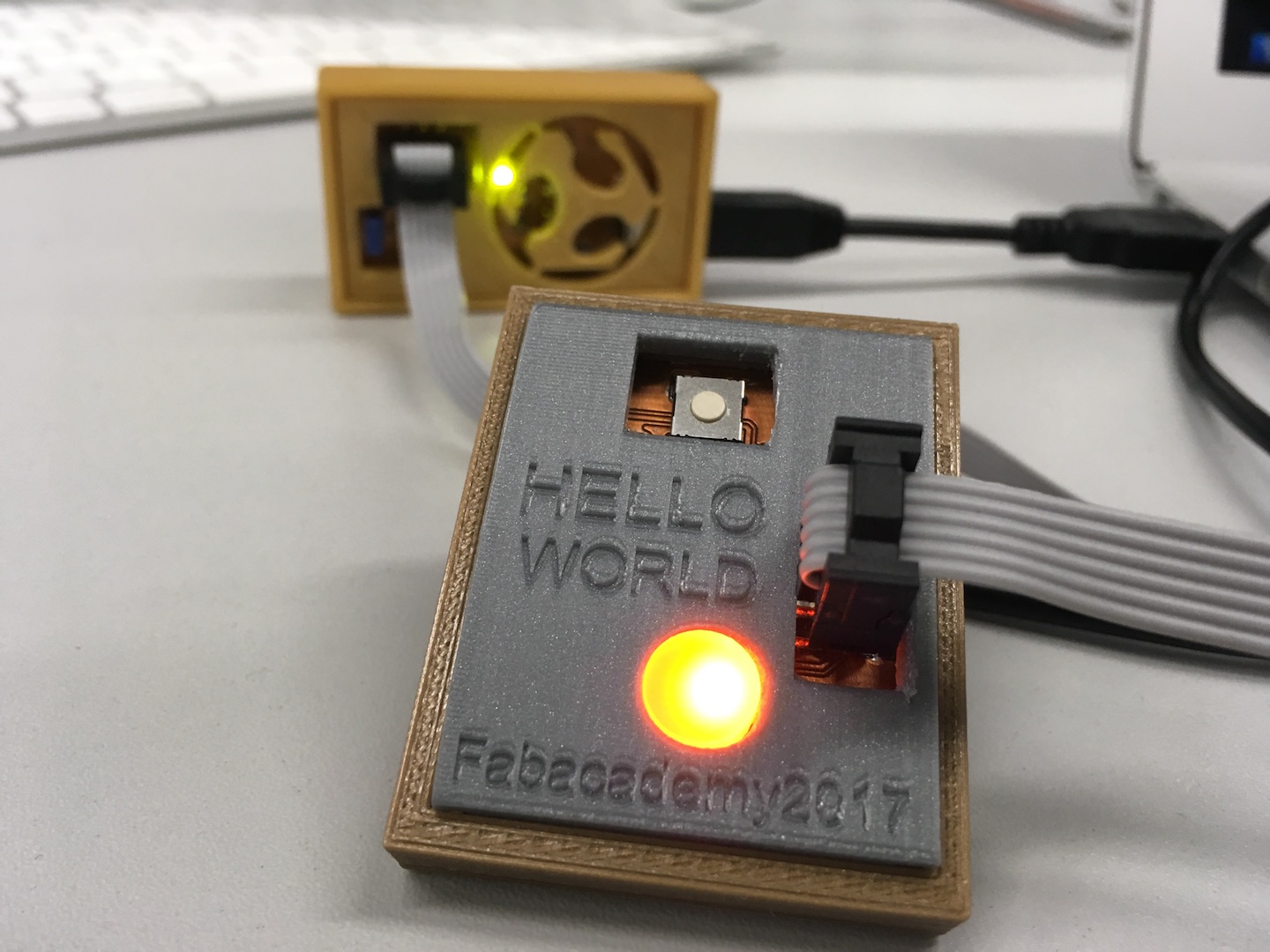
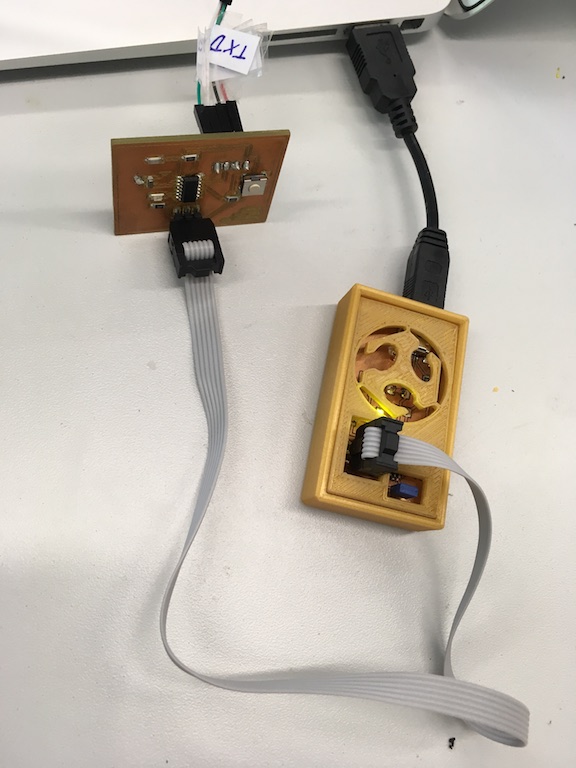
On the following photo you can see the self-made
fabISP for the first time in operation.
![]()
![]()
![]()
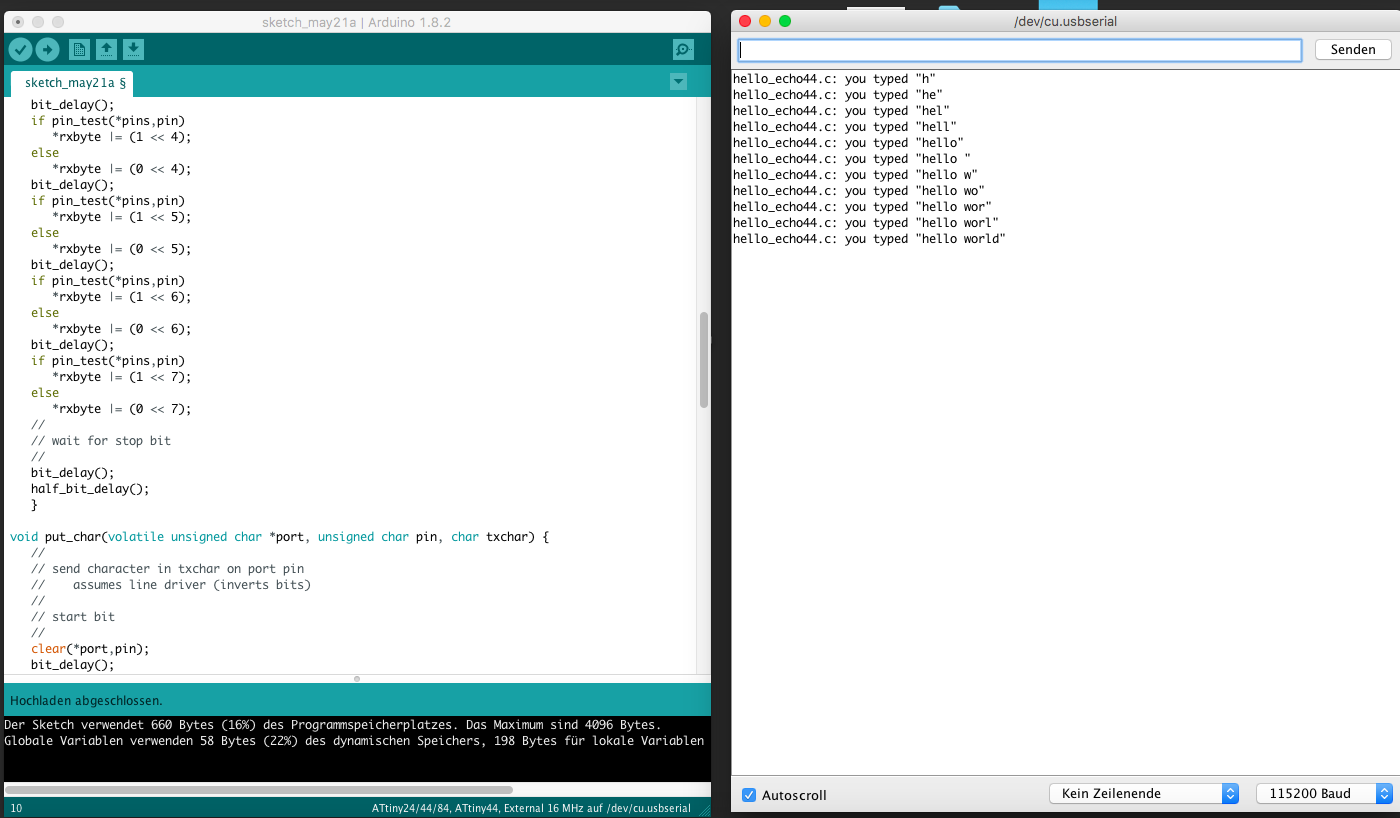
Programming hello-ftdi board
hello_echo44.c 115200 baud FTDI character echo
![]()
![]()
![]()
![]()
![]()
![]()
Modified sketch for hello_echo44.c 115200 baud FTDI character echo
//
#include <stdio.h>
#include <avr/io.h>
#include <util/delay.h>
#include <avr/pgmspace.h>
#define output(directions,pin) (directions |= pin) // set port direction for output
#define set(port,pin) (port |= pin) // set port pin
#define clear(port,pin) (port &= (~pin)) // clear port pin
#define pin_test(pins,pin) (pins & pin) // test for port pin
#define bit_test(byte,bit) (byte & (1 << bit)) // test for bit set
#define bit_delay_time 8.5 // bit delay for 9600 with overhead
#define bit_delay() _delay_us(bit_delay_time) // RS232 bit delay
#define half_bit_delay() _delay_us(bit_delay_time/2) // RS232 half bit delay
#define char_delay() _delay_ms(10) // char delay
#define serial_port PORTA
#define serial_direction DDRA
#define serial_pins PINA
#define serial_pin_in (1 << PA0)
#define serial_pin_out (1 << PA1)
#define max_buffer 25
void get_char(volatile unsigned char *pins, unsigned char pin, char *rxbyte) {
//
// read character into rxbyte on pins pin
// assumes line driver (inverts bits)
//
*rxbyte = 0;
while (pin_test(*pins,pin))
//
// wait for start bit
//
;
//
// delay to middle of first data bit
//
half_bit_delay();
bit_delay();
//
// unrolled loop to read data bits
//
if pin_test(*pins,pin)
*rxbyte |= (1 << 0);
else
*rxbyte |= (0 << 0);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 1);
else
*rxbyte |= (0 << 1);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 2);
else
*rxbyte |= (0 << 2);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 3);
else
*rxbyte |= (0 << 3);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 4);
else
*rxbyte |= (0 << 4);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 5);
else
*rxbyte |= (0 << 5);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 6);
else
*rxbyte |= (0 << 6);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 7);
else
*rxbyte |= (0 << 7);
//
// wait for stop bit
//
bit_delay();
half_bit_delay();
}
void put_char(volatile unsigned char *port, unsigned char pin, char txchar) {
//
// send character in txchar on port pin
// assumes line driver (inverts bits)
//
// start bit
//
clear(*port,pin);
bit_delay();
//
// unrolled loop to write data bits
//
if bit_test(txchar,0)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,1)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,2)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,3)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,4)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,5)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,6)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,7)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
//
// stop bit
//
set(*port,pin);
bit_delay();
//
// char delay
//
bit_delay();
}
void put_string(volatile unsigned char *port, unsigned char pin, char *str) {
//
// print a null-terminated string
//
static int index;
index = 0;
do {
put_char(port, pin, str[index]);
++index;
} while (str[index] != 0);
}
int main(void) {
//
// main
//
static char chr;
static char buffer[max_buffer] = {0};
static int index;
//
// set clock divider to /1
//
CLKPR = (1 << CLKPCE);
CLKPR = (0 << CLKPS3) | (0 << CLKPS2) | (0 << CLKPS1) | (0 << CLKPS0);
//
// initialize output pins
//
set(serial_port, serial_pin_out);
output(serial_direction, serial_pin_out);
//
// main loop
//
index = 0;
while (1) {
get_char(&serial_pins, serial_pin_in, &chr);
put_string(&serial_port, serial_pin_out, "hello_echo44.c: you typed \"");
buffer[index++] = chr;
if (index == (max_buffer-1))
index = 0;
put_string(&serial_port, serial_pin_out, buffer);
put_char(&serial_port, serial_pin_out, '\"');
put_char(&serial_port, serial_pin_out, 10); // new line
}
}
![]()
![]()
To also check the FTDI cable or a serial interface with a print function I have created in week 14 another fabkit, whereby I read the serialprint of a simple text with a baud rate of 57600 via the software Coolterm. If you want to learn more about coolterm and also what driver you need check my Week 13 - input devices.
![]()
![]()
![]()
Sketch for serialprint a text:
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
Serial.begin(57600);
}
// the loop function runs over and over again forever
void loop() {
Serial.print("Hallo Welt!\n");
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
Serial.print("I bims, der FabKit vong Marsi her! \n");
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
![]()
Download-Section:
hello_echo44.c
main.c (blink example)
Makefile attiny 44
Hello world case
coolterm software
![]()
![]()
![]()