
This week mark the beginning of the two week long group project where we should make a machine with at-least have 2 axis of motion. As we have a big group of participants, Franc divided us into 2 teams, Team 1 and Team 2, and I am in the later.
We sat together and after a few brain storming sessions decided on a 3 axis machine which prints icing for cakes. Puneeth, who is also our team leader, is the one with mechanical design experience and he contributed by designing the Linear slide for our machine.
As we don’t have any suppliers readily accessible for getting the hardware like the smooth rods, threaded rods, belts etc. So I along with others went to the near by flea market for sourcing components like rods, drive belts motors etc. We were successful in scavenging many.
So as we got an idea of the components available for building we started the work on the designs as we got the reference. The sliders were designed by Puneeth and the mechanism for the movement of the end-effector by Yadu. We have decided to have the body made out of acrylic so I got the right measurements for cavities and columns with the appropriate tolerance.
Controller Board
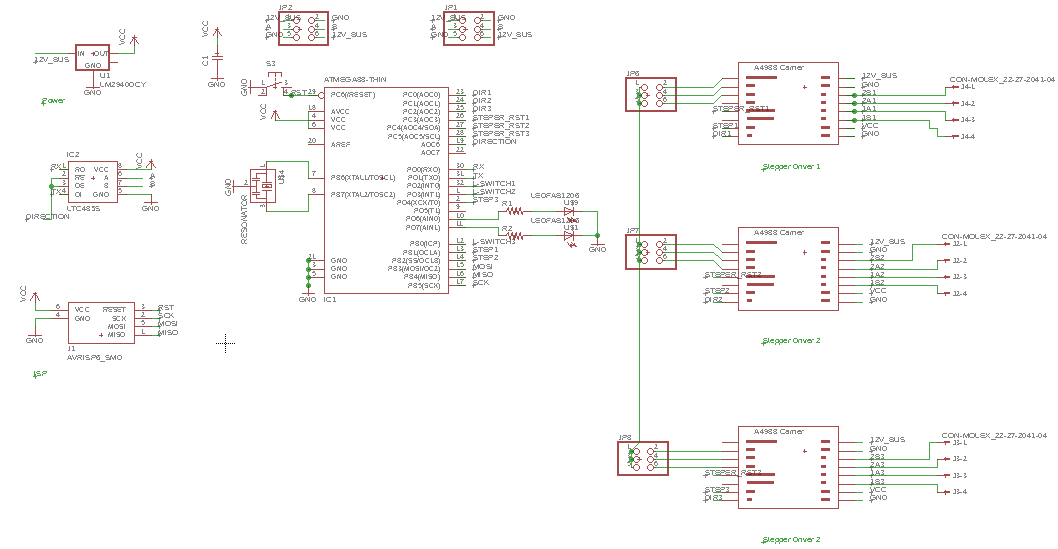
Due to the non availability of the gestalt board in our lab, we planned to design our own controller board. The plan is to have pololu as stepper controller and the an ATmega for the rest.
The stepper controller is planned to be Pololu board. The microcontroller will be a Atmega 328p. The board is designed for controlling 3 motors. It has provisions for having 3 limit switches and an RS485 connector. We tried to mill it using modella which was not successful. After milling out the board only we came to know that we missed out some connections and its very hard to get the 2 sided board alignment correctly.

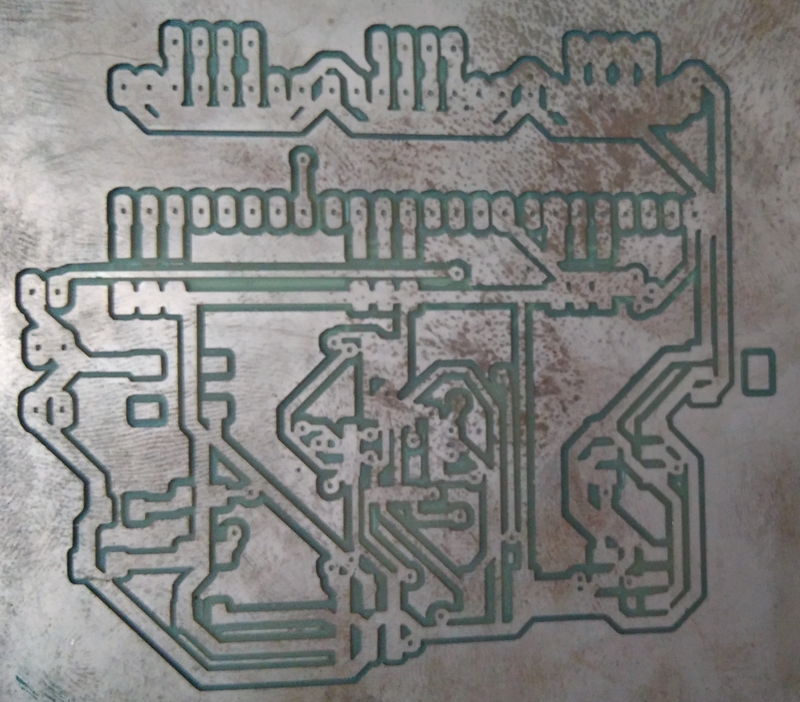
Because of the limited time we had to abandon the development midway. I plan to keep the designs anyway and finish it in the future.
Planning
I was also responsible for the smooth operations of the development. I coordinated the development and assisted in designing, making and assembling the endeffector. We had time and resource deficiency which we managed to overcome. You can see the documentation of our team here.