15. Mechanical design¶
The topic of this week is about Mechanical Design. We learned various kinds of mechanism of machines, acctuators, autometors and so on.This class and week17 (Machine Design), those are seriese of class for the main topic (and one of the important concept for next step of Fab Lab): Machine That Make. Class video is here.
Assignment¶
Group assignment
- design a machine that includes mechanism+actuation+automation
- build the mechanical parts and operate it manually
- document the group project and your individual contribution
The assignment in this week and two weeks later (week 17) is to make a machine in the group. We, students in Fab Lab Kamakura, build a Brush Painting Machine (BPM) to paint the two characters of the new era. And, we decided to use Japanese Bamboo for frames of the machine.
Our Group assignment page describe whole process of machine building.
- Fab Lab Kamakura, Group assignment page of mechanical design (week 15).
- Fab Lab Kamakura, Group assignment page of machine design (week 17).
Individual Contribution¶
My task for machine building is about Electronics and Programming. So, this week, I studied about Core XY, basic mechanism of the machine that we will make. Then, with using the 2018 Kamakura Stuident’s Core XY Plotter, I designed electronics parts with using Satshakit. Then, I downloaded Core XY program and checked whether everything would work.
Please also see my week 17 assignment, that describe CoreXY program, generating G-Code and Interface Application in details.
Check of Core XY mechanism¶
First, we checked the mechanism of Core XY. Core XY have two stepper motors and those work as follow:
- When two stepper motors rotate same direction, the end-effector move to X axis.
- When two stepper motors rotate opposite direction, the end-effector move to Y axis.
- When rotating one stepper motor, the end-effector move diagonally.
CoreXY Moc up for Mechanical Check from Yosuke Tsuchiya on Vimeo.
Check the circuit of Core XY with Breadboard.¶
Next step is to wiring stepper motors to control from micro-controller. The following is a schema design of Core XY that we can see it’s instructable page.

This schema use two Big EasyDrivers. But, our lab didn’t have them, so we used RepRap A4988 motor driver instead. Here is the wiring pattern of A4988.
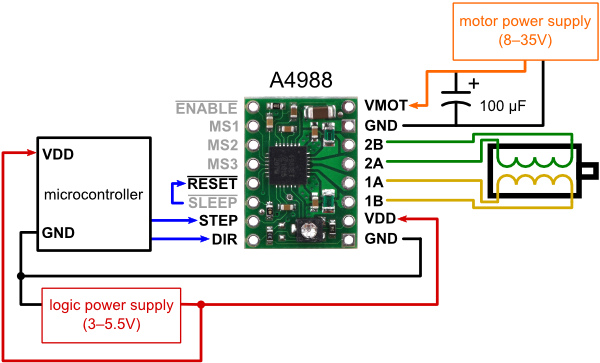
According to Mr.Jun Kawahara’s documentation page (of 2018 Kamakura student’s machine building work), Big Easy Drivers have three pull-up registers connected to MS1~MS3, and A4988 also should add some pull-up registers to MS1~MS3.
So, I added 10K pull-up registers to MS1~MS3. Wiring is completed with Arduino UNO..... But, that is too complicated.
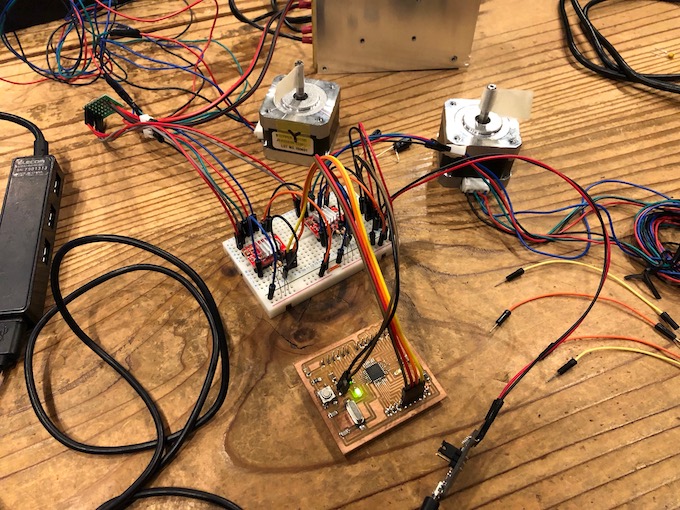
I am checking whether stepper motor works or not with using Satshakit (Arduino Compatible board).
It works well.
Program for Controlling with Satshakit¶
We connected satshakit and our motor drivers breadboard to Core XY machine that 2018 Kamakura students group made. Then, I downloaded Arduino Source Code to control Core XY machine from here.
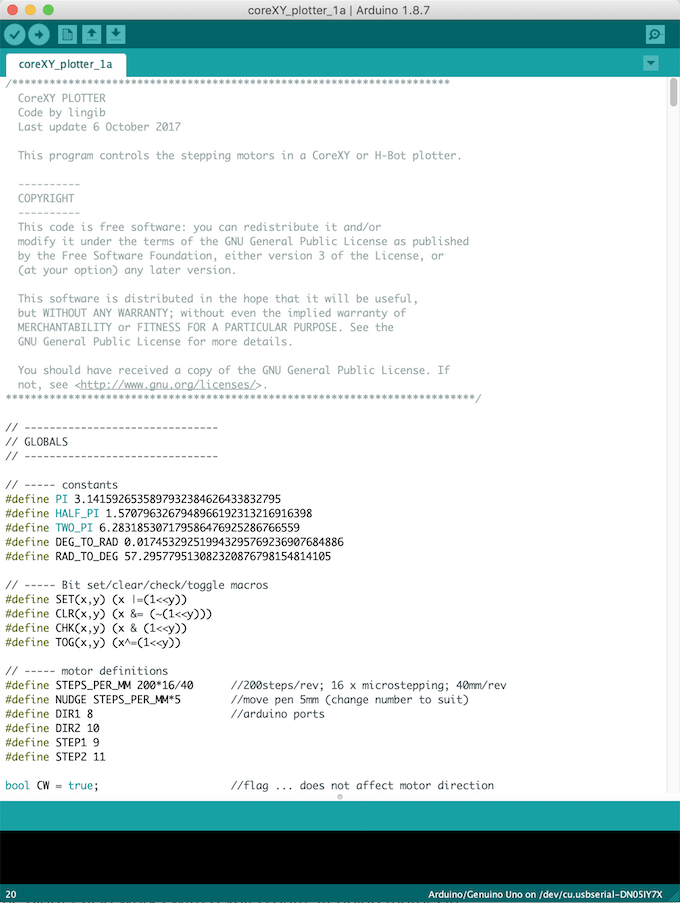
Upload this cord to Satsha kit, then trying whether stepper motor works or not.
That works well…
Next step¶
- Check basic function of Core XY Sample Code
- Studying G-Code for controlling the Machine
- Generating G-Code of Characters
- Interface Application for sending originally generated G-Code to the Machine
See also my Week 17 assignment page