
Group members
Jakob Nilsson
Hanne Eriksen
PArt 1: Mechanical design
In this weeks group project we decided to make a "pingpong" game. The FabLab has large windows out to the streets, so we decided that we wanted to make something in the end would be interactive and fun for the people passing by. Since this week was just about making the mechanical part, we ended up dividing the task in the way that Jakob focused on the mechanical part, and I on the framing and layout layout of the game. Jakob with this engineering backround dived in on the project with great endavour, and ended up after 3 prototypes with a "shooter" that works (maybe too) well. We found out in the process that we would keep the concept of the game as easy as possible on the first run, and instead make some changes when we would automate it.
Hanne - Mechanical design week
Jakob - Mechanical design week
Game Concept
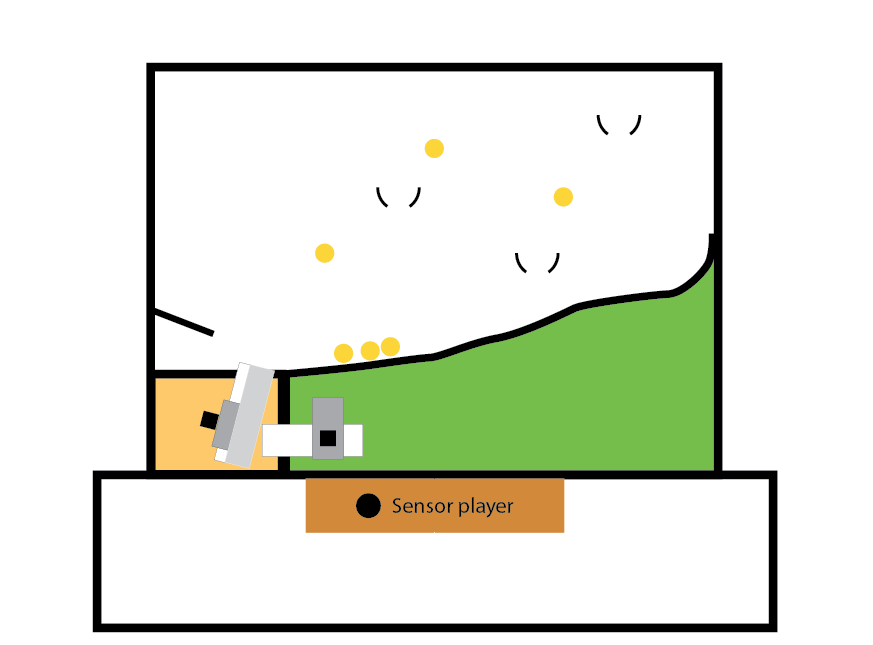
The concept of the game is to make an interactive pingpong/flipper game - that would stand in one of the lab's windows towards the street. The game consist of a shooter that is placed in the bottom left corner - and is connected to two motors. One motor rotates the shooter, and the other one "loads" the shooter. The game has 3 "targets", where the aim is to get the balls to pass through them. To make the game interactive, we would add some sensors that is turned out towards the window. That way, the "public" can activate the shooter fromt the outside, trying to hit the different targets.
Shooter
The shooter is made from 4 mm plywood on the lasercutter and powered by simple tension springs. We first built hand operated versions (shown on the left) to get a grip on tolerances and the forces involved. When we had a working concept we proceeded to add an automatic release mechanism that loads and launches the ball using one straight movement.

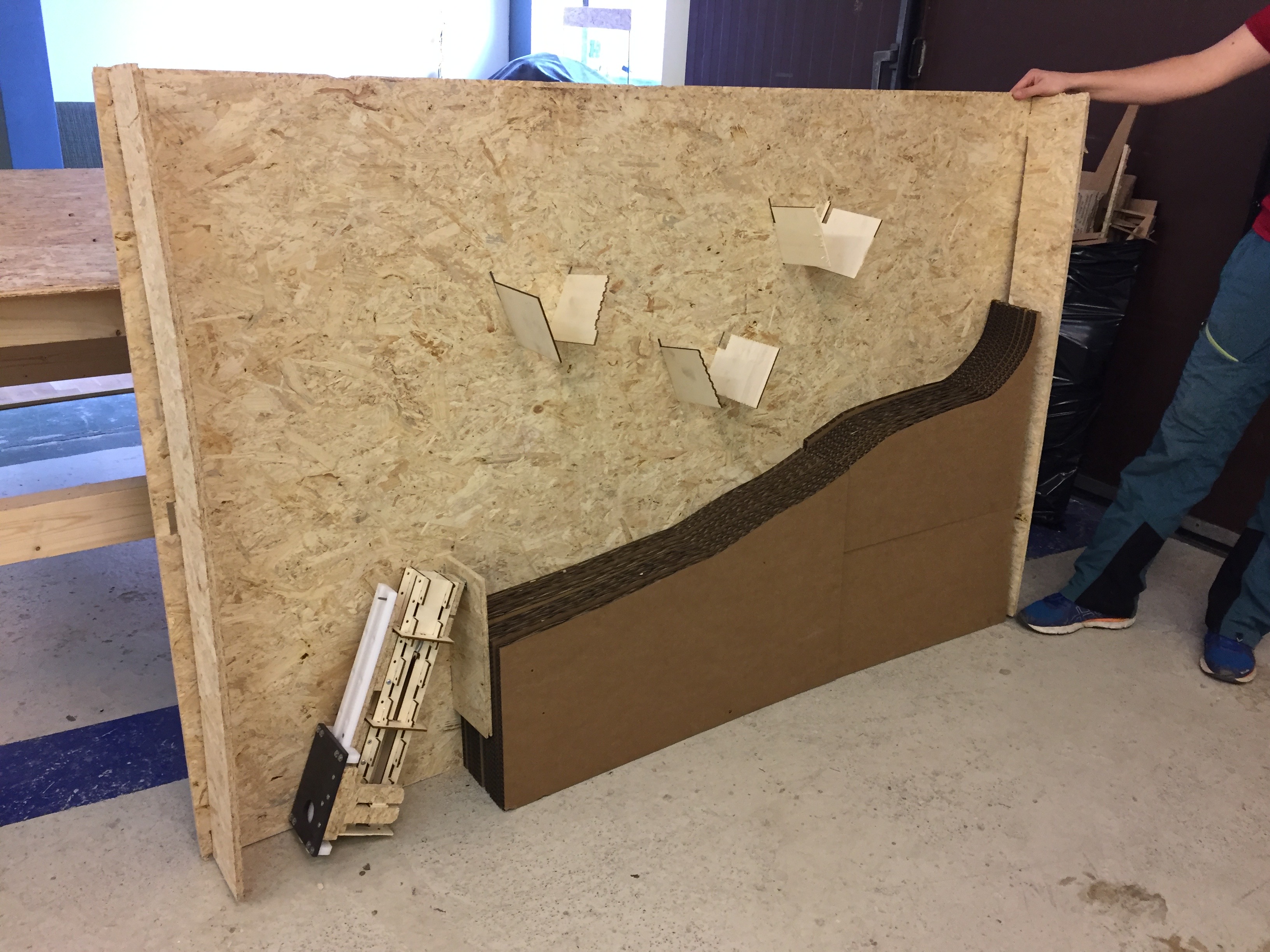
The frame
The frame is made in the full scale of the window. And it is meant to stand towards the window - making the window the "front wall", so the balls will be contained inside the frame.
The frame is made of OSB and milled on the CNC with a 3mm endmill. We luckily managed to fit in all the pieces needed for all the parts in one sheet of materials. The "slope" that leads the balls back to the shooter was made on the lasercutter with double layered cardboard.
Group project
PArt 2: machine design
On the second week of the group project, the task was to add output devices to the project and "make it do something". For us, this meant that we would be adding 2 steppermotors to the game we were already making.
Hanne - Machine design week
Jakob - Machine design week
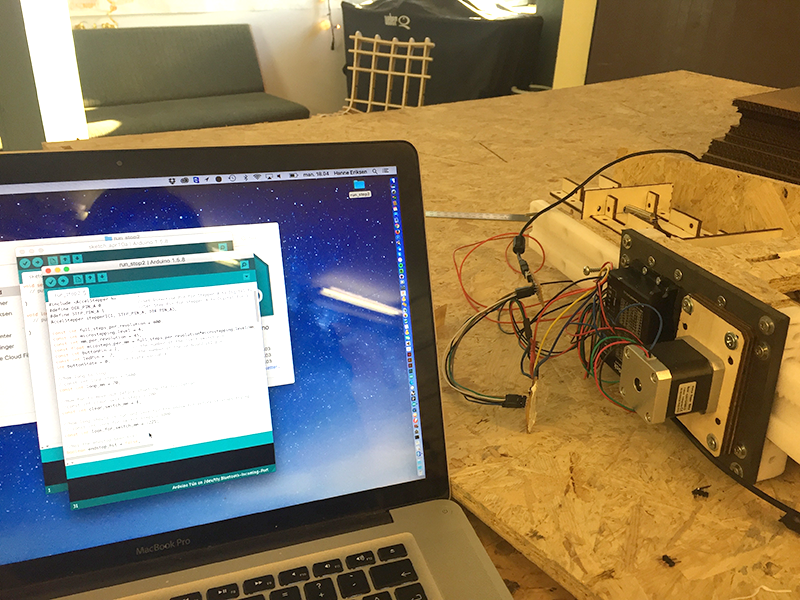
Connecting and programming the motors
The motors was first connected with the Microstepper and to an Arduino, to make get it up and running and testing the code. We then went over to program the FabISP by using the HelloEcho board we made in the previous weeks by doing these steps.
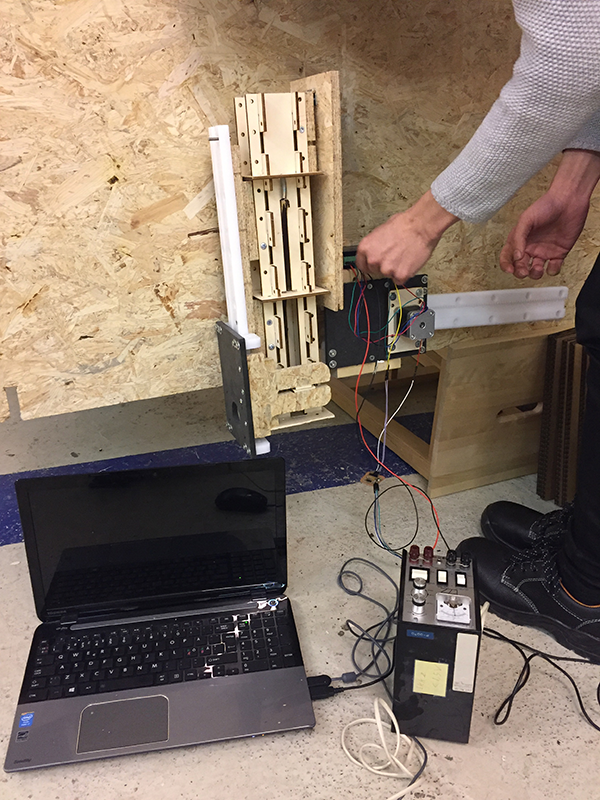
Attaching the motors to the mechanical parts
To make the motors move and operate the shooter we used linear axis made from POM and Valchromat machined on "Hank" a fab lab made CNC milling machine which is part of the fabricateable machines project. Here is a video for the axis being milled.
Programming the motors
To tell the machine which position is "home" we used limit switches.
Programming roadmap:
1. Move carefully towards home switch.
2. When switch is found:
Stop and reverse a short bit to clear the switch.
3. Start back and forth movement.
4. Repeat pendulum movement forever.
Last touches
When the motors were in place and more or less working the way we wanted it to, we found out that we had to do some minor touches the structure of the frame. The shooter had ended up becoming a bit longer than the initial plan, resulting it to not be able to rotate as far as we needed/wanted to load the shooter. This was resolved by adding a piece of materials at the top of the vertical piece. That way we could fasten the shooter at a higher point while still touching the horisontal axis. Hanne also accidentally managed to break her FabISP when programming it, so we ended up having to programme both motors with the one we had left.

Final game
The final game ended up more or less the way we had planned. Although we decided to not cover up the "Shooter", since this in fact is the most interesting part of the machinge. We are also left to cover up the area around the shooter, so the balls would go back into the "barrell" instead of outside it.
Further development opportunities

Files
Code
Arduino code, horizontal-aming axis. Requires this stepper library.
Arduino code, firing mechanism. Requires this stepper library.
Launcher
Fusion360 file ping pong ball launcher
Step file assembly of the ball launcher
DXF-cutsheet to make the launcher
PDF-cutsheet to make the launcher
Electronics
Board (Not made, hacked from the hello echo card)
Traces (Not made, hacked from the hello echo card)
Schematic PNG image
Schematic PDF document
Board EAGLE file
Schematic EAGLE file
Axis
Ø5mm ID, 9 tooth pinion STL for 3D printing
2D and 3D of rack and pinion 3DM for Rhino
3D of rack and pinion STEP file
GITHUB Source repo for the rack and pinion
Materials and components
Materials
OSB sheet 1200x2400mm
Double layered cardboard
4mm plywood
Nuts and bolts
Electronics
Arduino
FabISP
HelloEcho
Steppermotors (Nema17) x2
Makeblock stepperdriver x2
Endstops x2
Linear axis made from POM and Valchromat x2