Process
Here you will be able to see some of the process and research I did for my final project.
You can find the first ideas and references for the final project in week1
Some months ago I contacted Özgur Atmaca who did some research on this same matter (see here), and has helped me a lot to have a clear direction on what might be achievable and what might not.
In week8 there are some trials I did with hobby servos and some of tests I did with the Dynamixel AX-12A. See video below:
pass:fab
Also in week17 I talked a little bit more about the expectations of my project, and how I planned my work to do so. I have done several trials with the motors AX-12A, with OpenCM9.04 board, and then with FABUSB2AX I built myself. Below you could see some trials with the board, and the system of pulleys and coils I designed.
pass: fab
I tried to power all the servos at once but had some problems due to the high amperage demand. Therefore I had to buy a 3AMP power supply. In the video below you can see how just a few of the motors were activated when using a 1AMP transformer.
pass: fab
Instead, if the motors were used one after the other the amperage was reduced
pass: fab
Below some first trials with the Python code I did, before to mount and install all the pulleys, just to make sure everything worked as I expected.
pass: fab
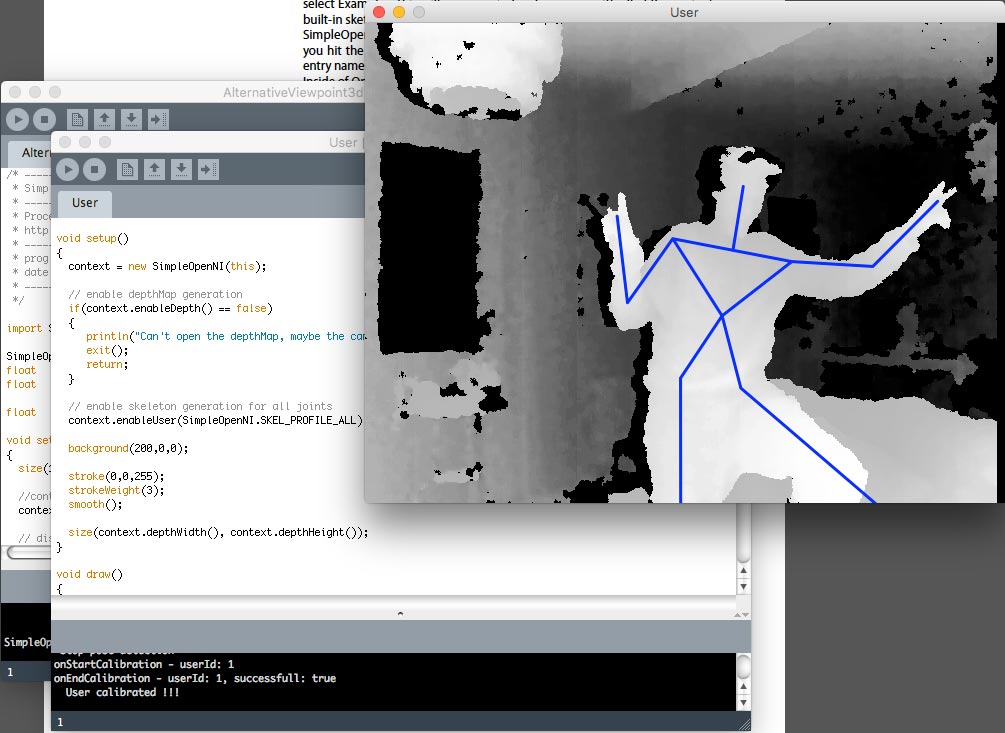
I also have been looking at Make things see to learn how to communicate and transmit data from Kinect to the servos. Sadly I wasn't able to get to a proper solution, to conect my motors to it, but I will continue investigating to do so.