Final Project.
This is the space where i put my ideas about my final project.
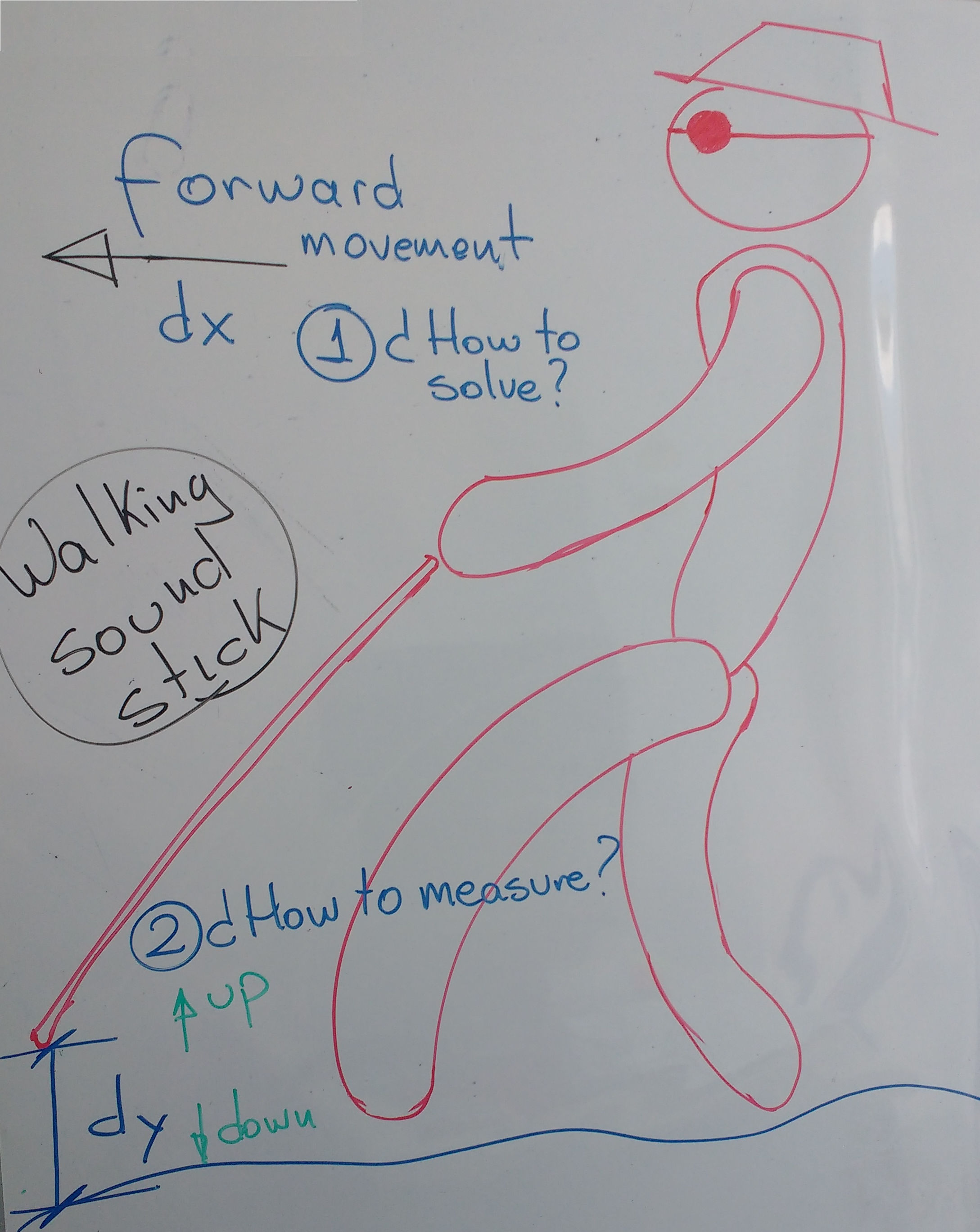
The walking sound stick.
THE LIFE OF THE BLIND BARD
Because Homer performed and sang he is called a bard. He is thought to have been blind, and so is known as the blind bard, just as Shakespeare, calling on the same tradition, is known as the bard of Avon.
The name "Homer," which is an unusual one for the time, is thought to mean either "blind" or "captive". If "blind," it may have to do more with the portrayal of the Odyssean blind bard called Phemios than the poem's composer.
Interaction with the environment
Blind people may have difficulty interacting with their environment. Because it can be difficult to perceive where one is and move from one place to another, the movement may become restricted, leading to little contact with the surrounding world. While other senses can be improved, this can be offset by a tendency to over-protection.
"Is it very difficult for a blind man's day to day?"
"It's not difficult, it's hopeless. Take it with patience. In supermarkets, for example, I do not see the prices or the products and in the big ones I get lost. I have to ask people to buy. In many everyday situations you depend on others to lend a hand.
- Are you encountering many obstacles regularly?
- In many cases blind people do not carry the cane, people do not realize that they do not see and when they put obstacles if they want, they stumble.
There was two principal questions to solve:
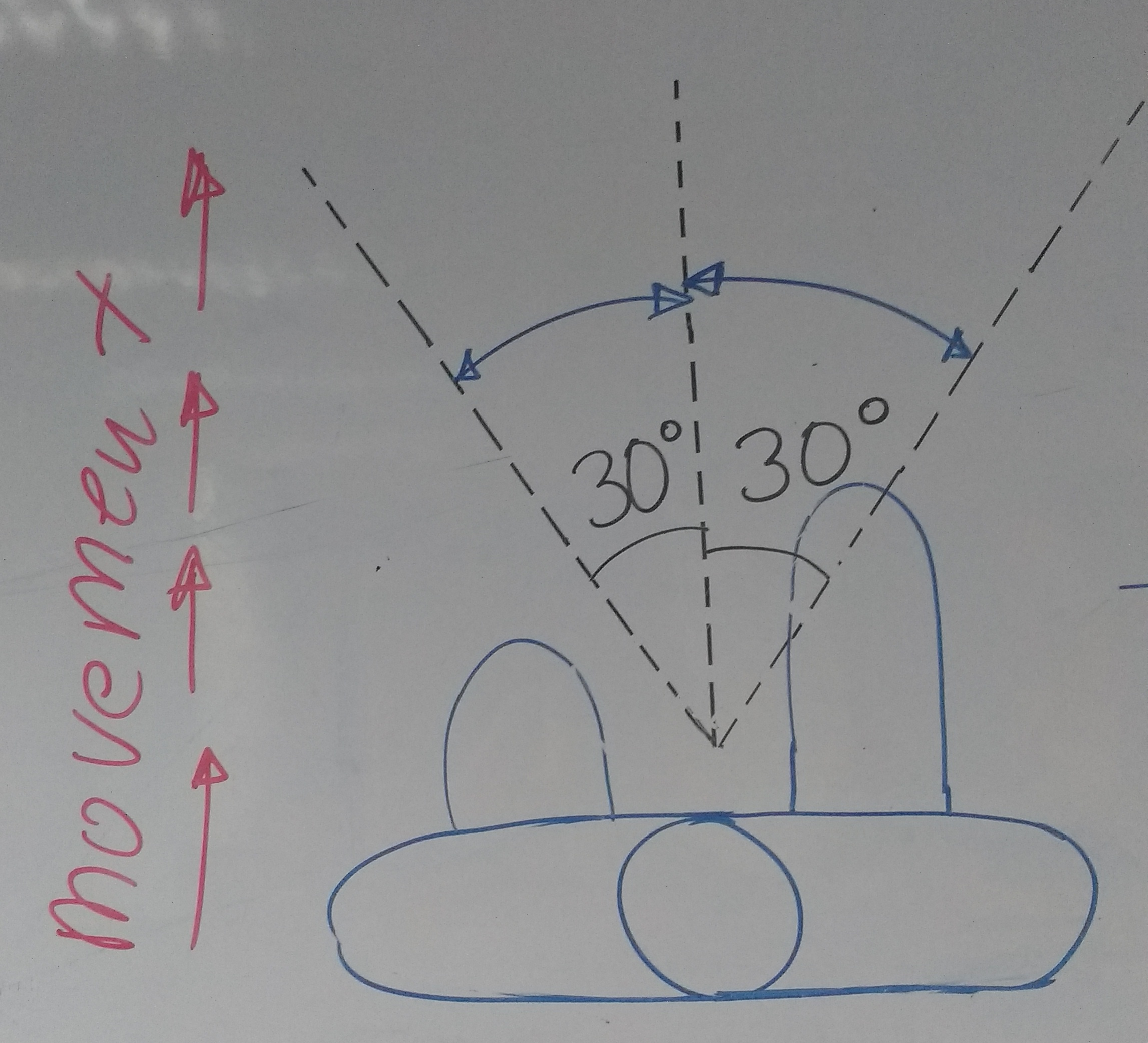
1. The blind people makes a sweep over the floor seeking an obstable or any object. This movement is represented by an angle moving the stick or cane about 30º degrees in both directions. This sweep is on a plane that i call XY plane.
The walking sound stick.
2. Other action makes by the blind people is in Z plane and consists to move up and down the cane to solve if there is a depresion or a hole in the floor or something like a stair step.
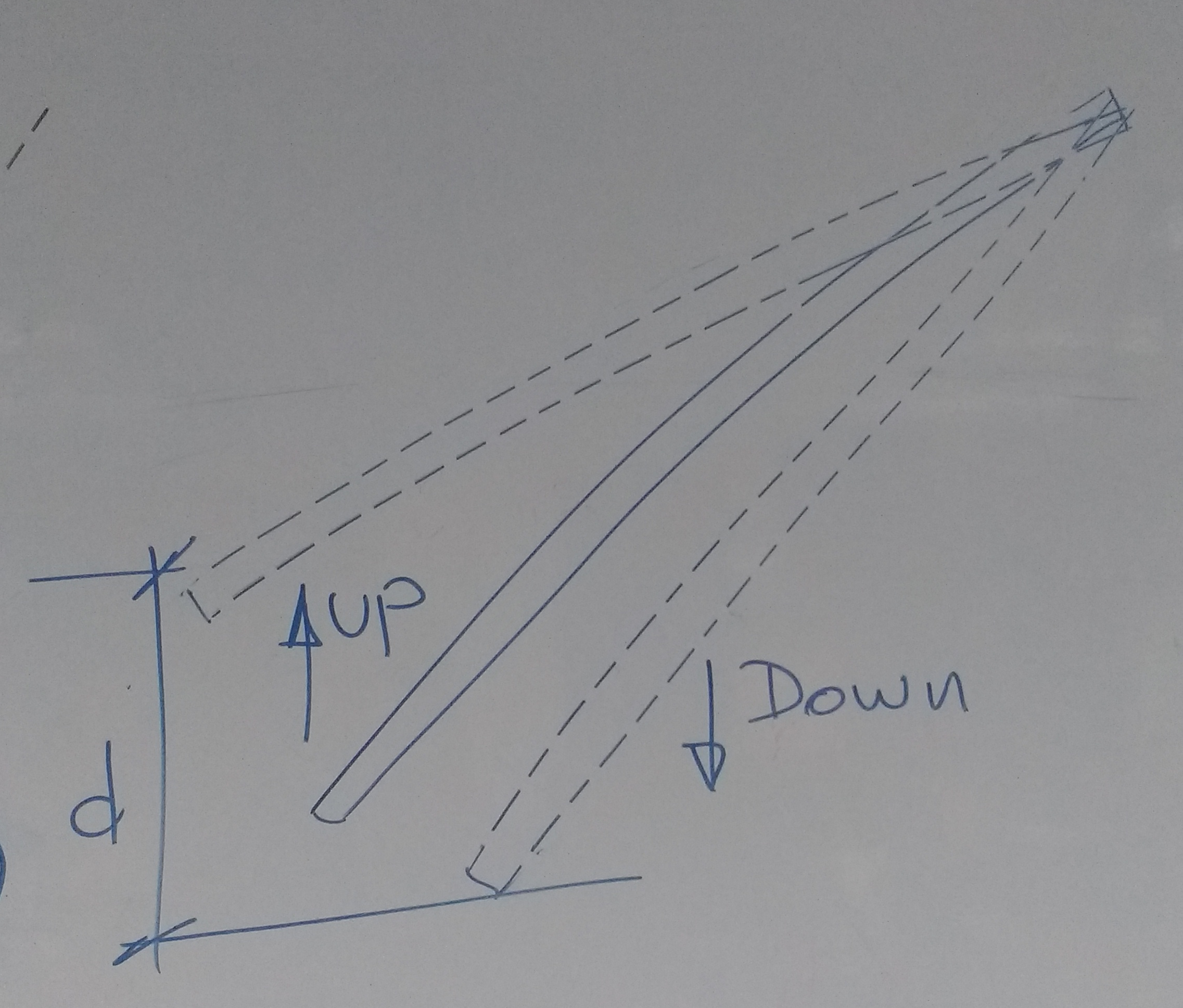
So I need a plain to solve these problems.
For the first problem, i think that the distance of measure or detect it is in order to 10 cm to more so I plain to use to solve this problem with an ultrasonic sensor at the final part of the cane. When an obstacle is detected a sound indicates the proximity by a sound in a train pulses.
Now for the second problem in thought that I need a IR emitter and sensor to get the distance in Z axis for the final part of the cane and the floor surface. So when a distance, in order to 10 cm or less, that wil be calibrated, is more than an specific the sensor will activate a vibrator motor like in a cell phone to indicate a depression in the floor.
So, I need to redraw an Atmel 328P to get a board to control these functions, by the small space in the stick. Im working in to th design of this and the next week I will show the 3D model.
The full expanation of the final project is here.
Best regards