Week 11 - Machine building week 2
My contribution to this weeks group assignment:
1. Making the FTDI 485 cable -> Gestalt adapter
2. Coding the robot movement sequences
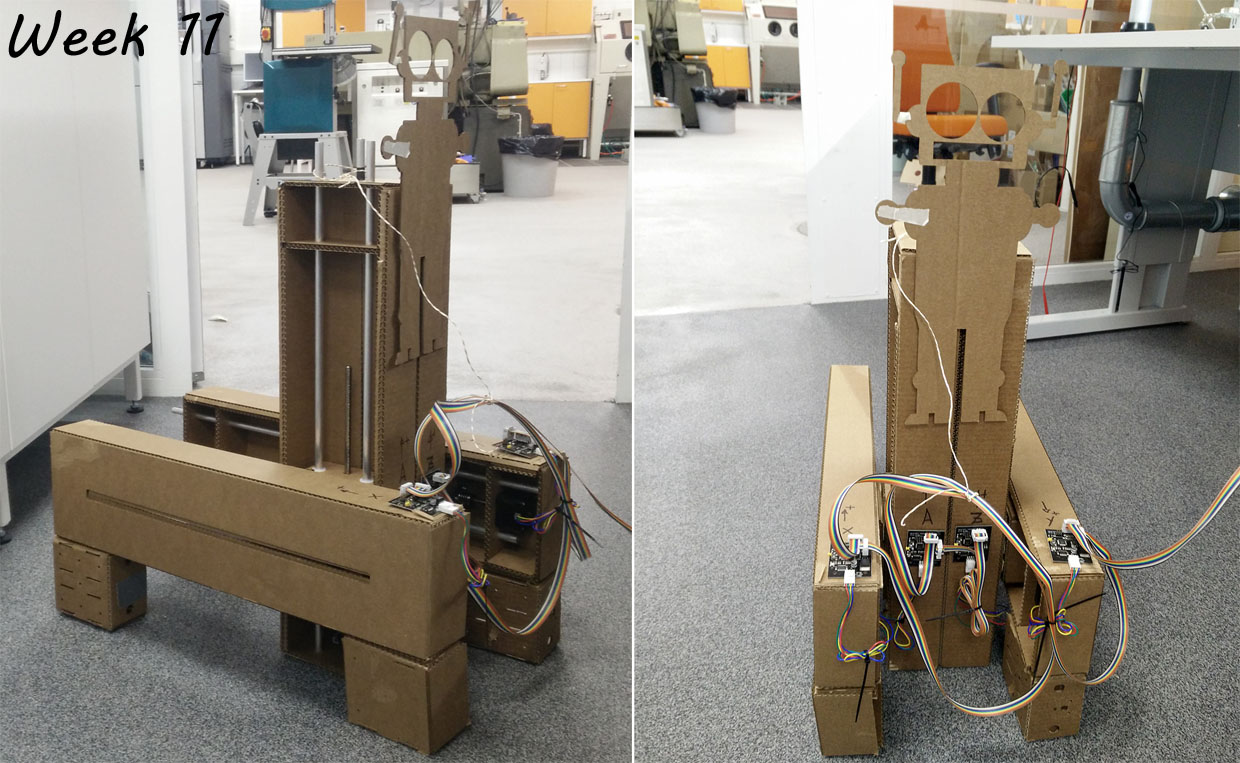
This weeks mission was to make the week 9 machine automated. We used Gestald nodes and steppermotors with all necessary parts build into the card board stages. The group page explains the general process. My page descripes what was my part on the groups efford.
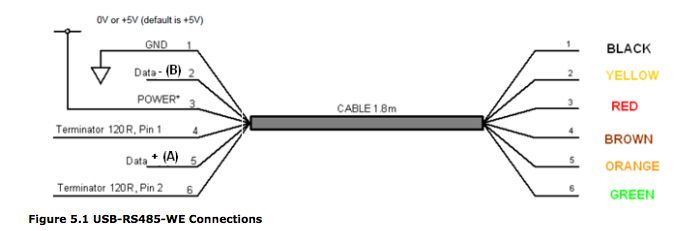
Making the FTDI-connector cable
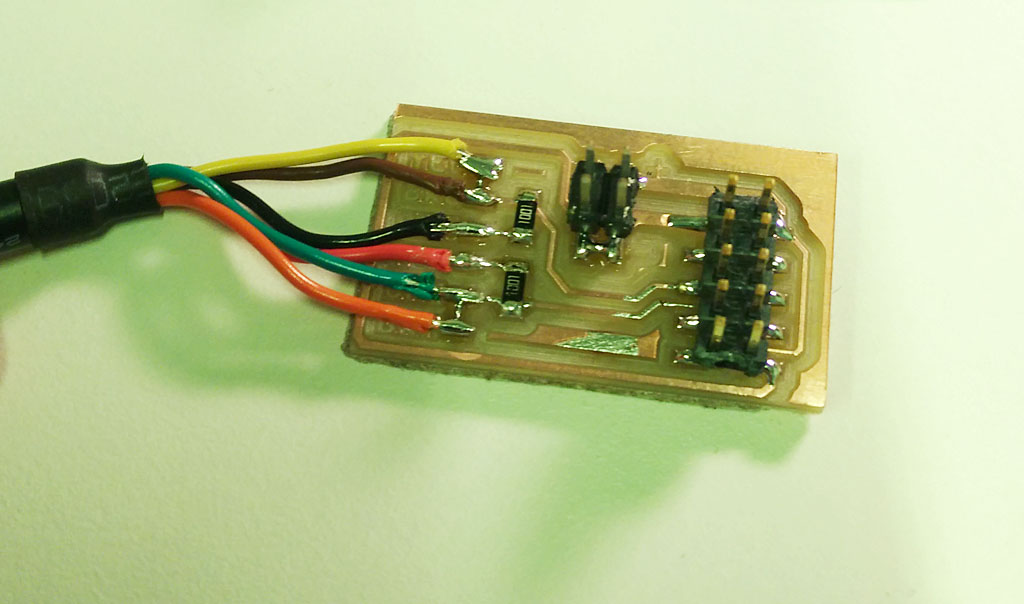
To connect the Gestalt nodes to computer and power sourse a FTDI-adapter had to made. I used the one Bas has designed. It can be found here: Adapter. The board was done with FabLab milling machine. The process is explained on week 4 page. I soldered the components and FTDI cable to the board. Here is the result.
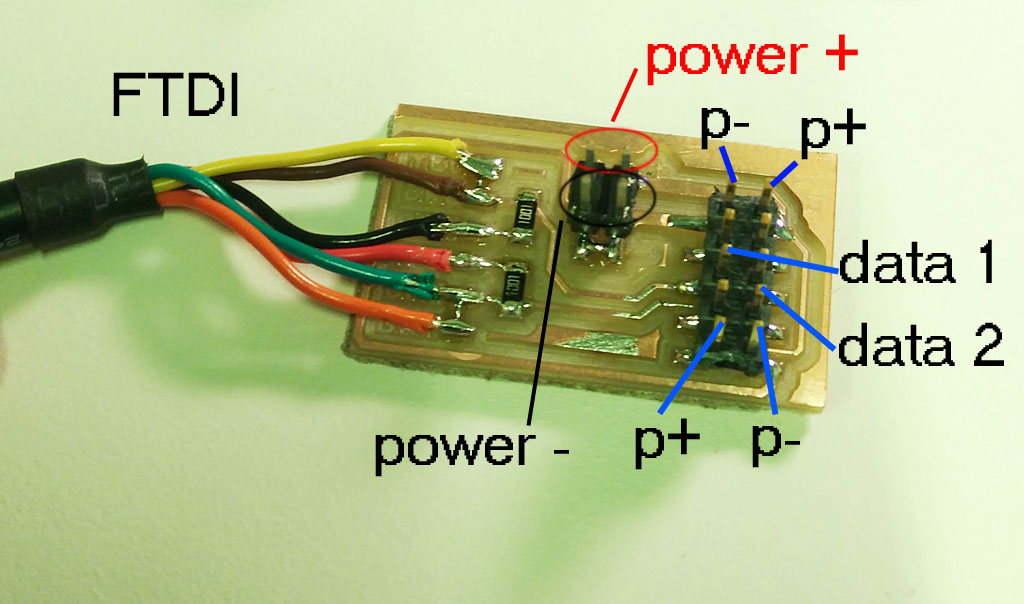
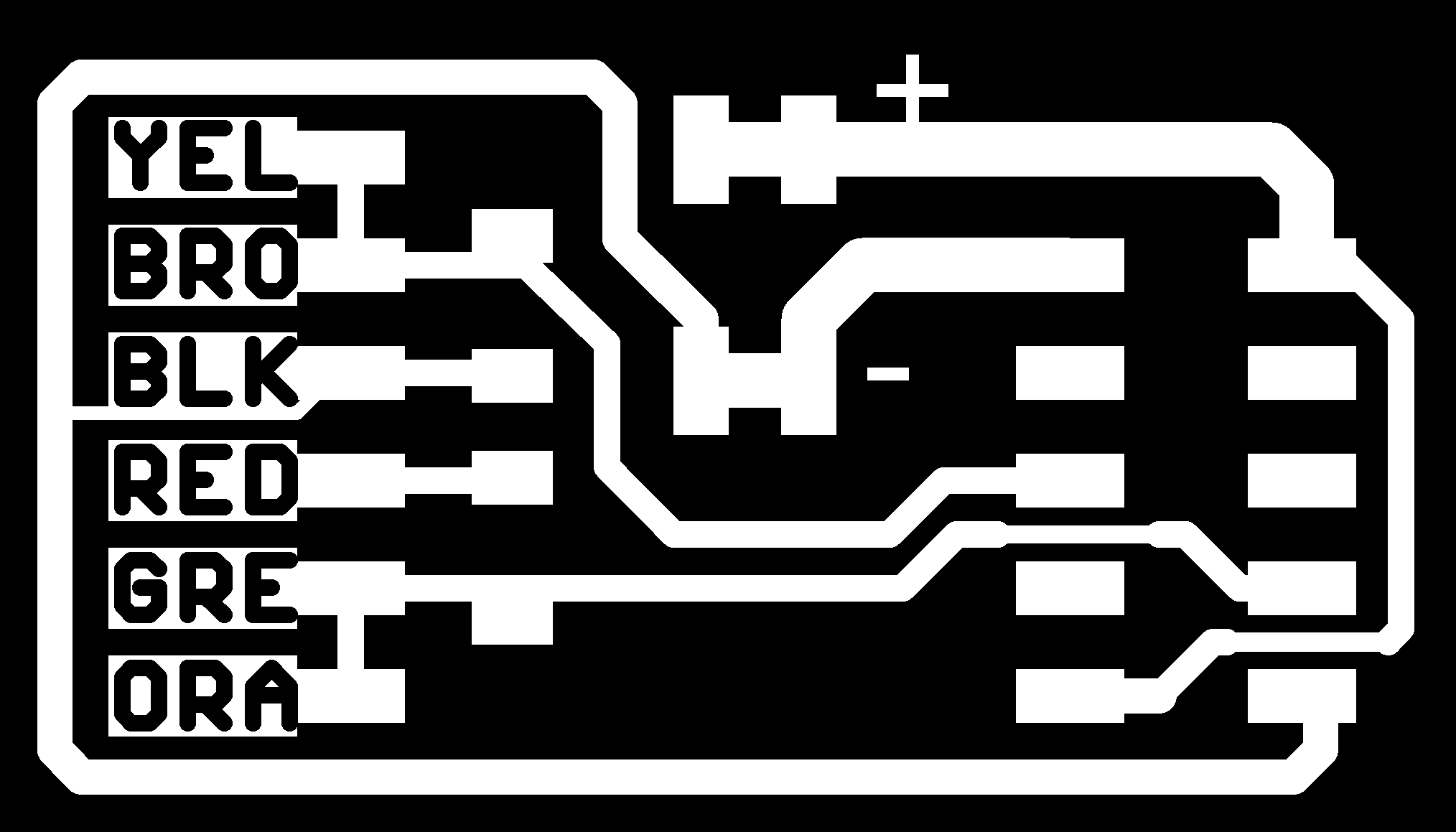
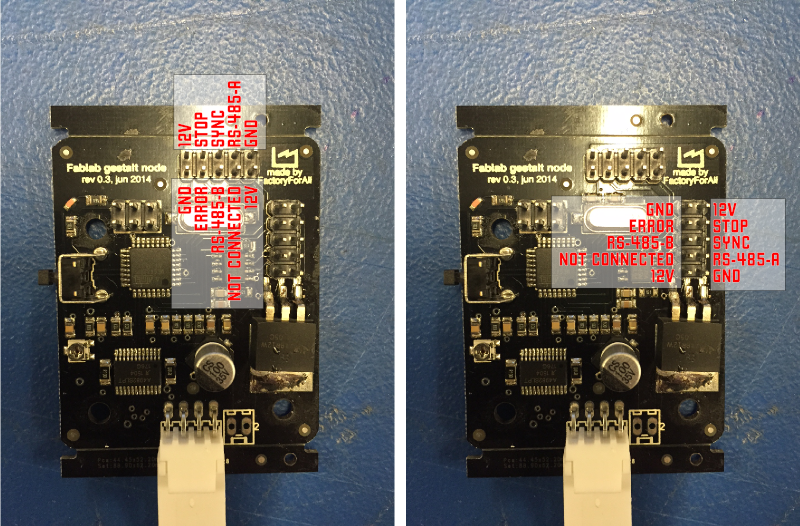
Here are to connections to Gestalt nodes and to FTDI-adapter. These images are taken from machine making tutorial page here.
Setting Ubuntu environmet up
This week I used my Linux Ubuntu computer to run the python to control the robot. Ubuntu has python 2.7. installed so I only needed to install Pygestald and pyserial packages.
I Downloaded and installed the Pygestalt code from here. It is found from: examples/machines/htmaa directory.
After installing gestalt I installed Pyserial 3.3. from this page.
Now I was ready to start modifying the example code modified for 4-axels by our groups member Yrjö.
Programming movement sequences
Nodes were installed just easily on to the robot like this:
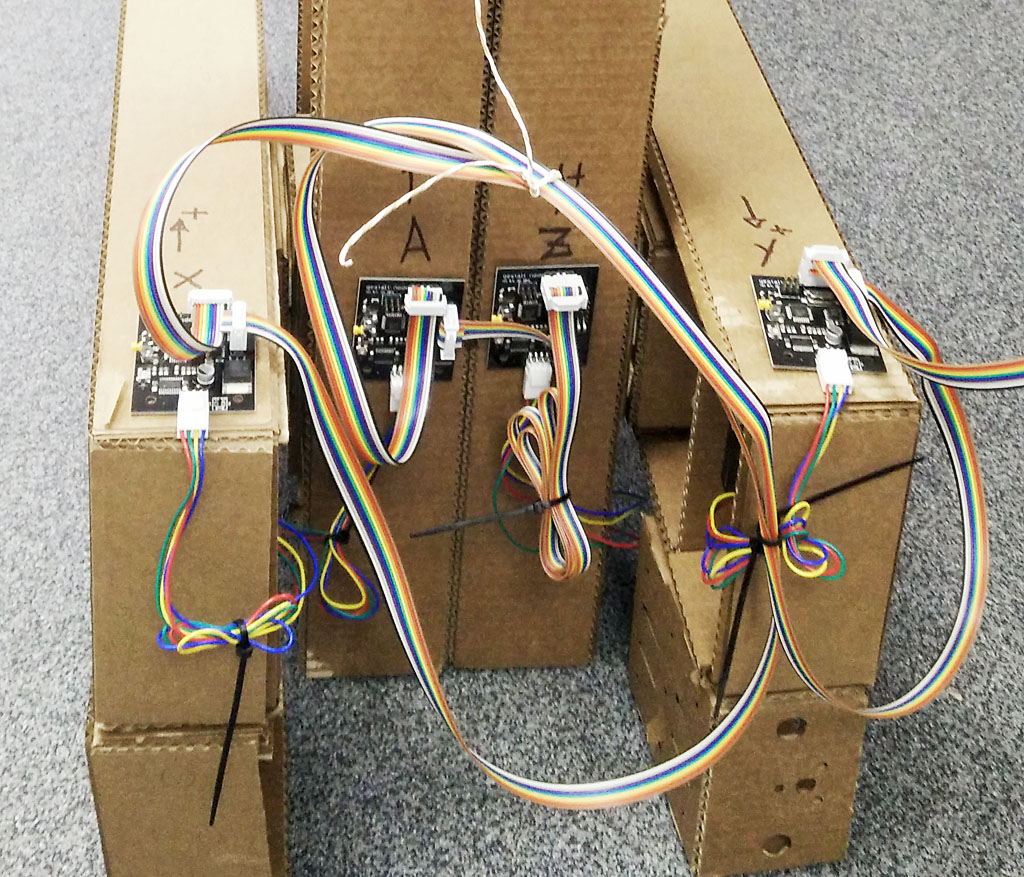
Now the robot was build and all Gestalt nodes were connected to the motors, I was ready to start programming the walking. To start Yrjö from our team used 3-axis demo software and modified it to use 4 axis. From there I started defining the stepping sequences. I made 2 different sets that are explained in machine building week 1 page, and the results can be seen on our teams general page on a video.
I also made a mode that would turn the robot. This was sort of a long shot to see if it could be done. At the end it worked ok. This can be seen at the group page video as well.
To edit the python code I used gedit text editor that is provided with Ubuntu install. Here is an example of walk mode 1 movement command in the python code.
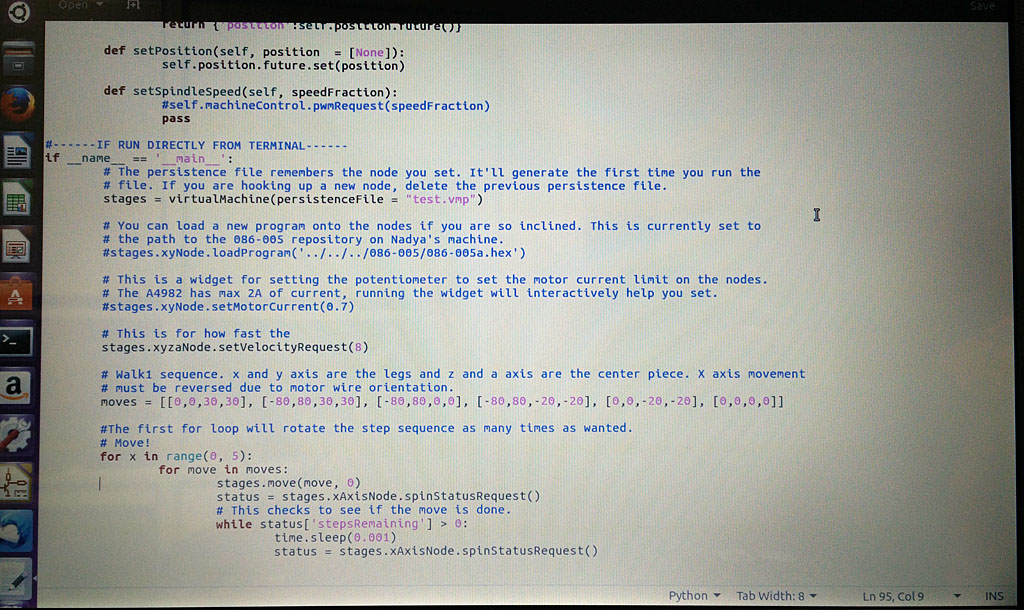
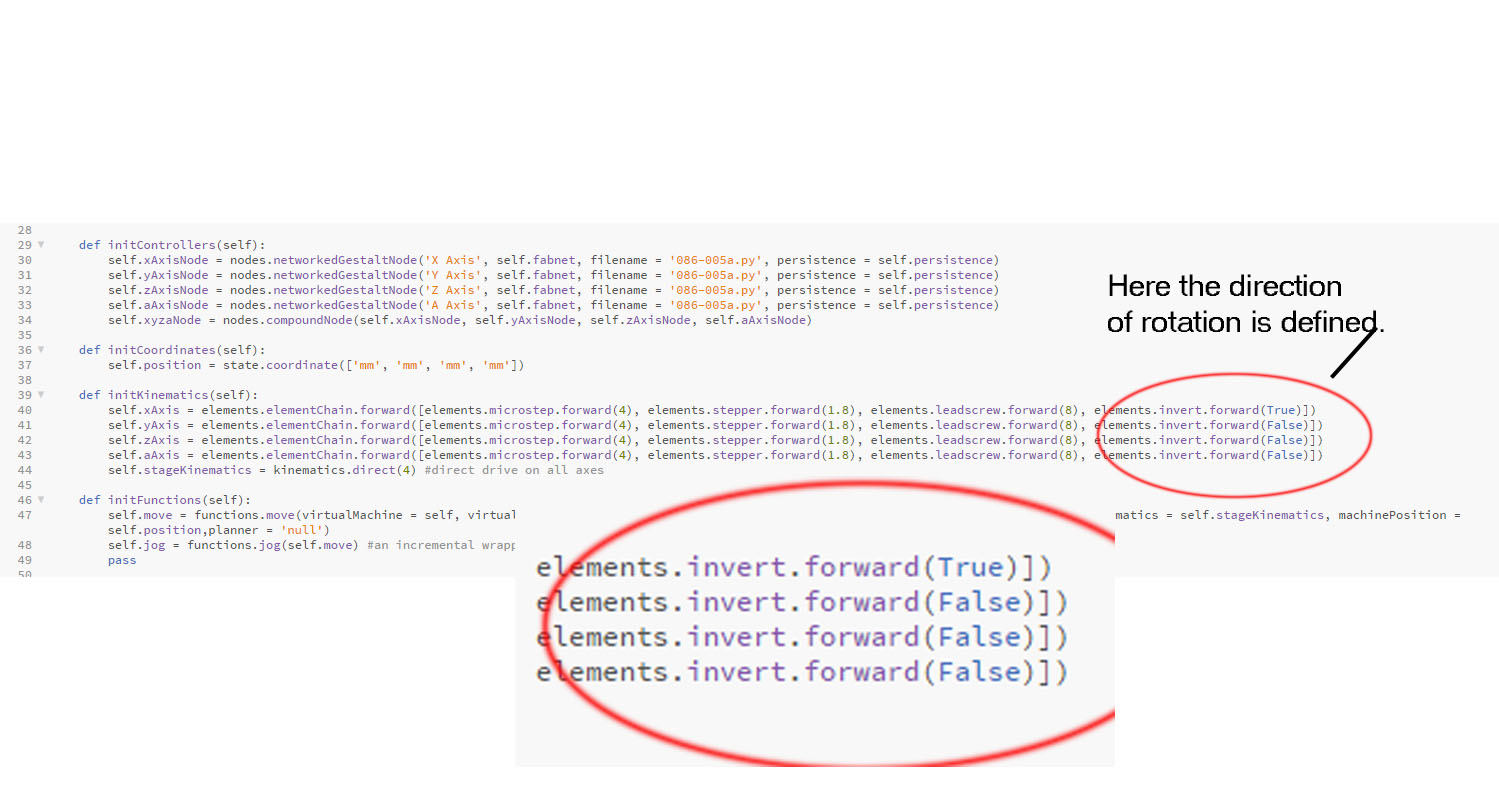
One of the motors was running in different direction. I first thought that was wiring issue, so I just run it in different direction from sofware. Later I found out that in the code, there is a command line defining the direction and that axis was defined to rotate in different direction. At that point I did not want to make all codes again so they still run like in the beginning, but later on, it has be changes.
Running the machine from computer happens as such:
1. Have your python code ready to run
2. Go to directory you have your python file
3. Open console with root access
4. Run the code from console: sudo python xyza_walk1.py for example
Files used with this weeks assignment
Walk mode 1 python code
Walk mode 2 python code
Walk mode 2 - long step python code
Rotate mode python code