
Machine
Our machine is walking robot which we made with 4 linear guides and 4 stepper motors. It can walk 3 different styles and more could be created by changing code with good imagination. Styles are equal stepping mode, steps turn by turn mode and direction change mode. All of walking modes are presented on our video clip.
More precise steps and reports can be find on individual assignment sites of our group members.
Our robot can be seen in action on our presentation video on top of this page.
Also files for this robot can be find on individual academy sites.
Music on video by www.bensound.com
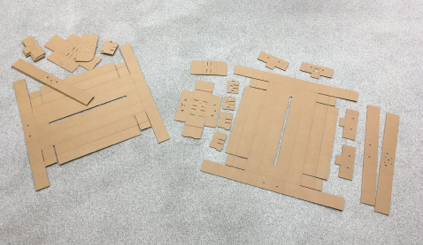
Cardboard body parts
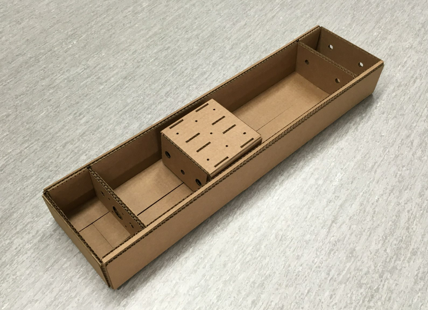
Assembled cardboard body
Final adjustments to program

Our robot design and building went in next steps.

Cardboard body assembly
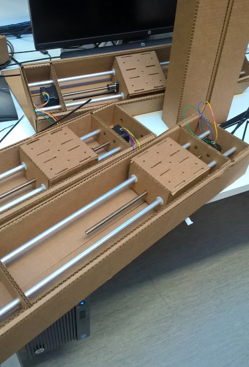
Actuators assembled to body
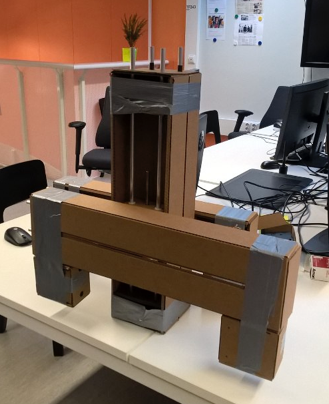
Bodies assembled to a machine
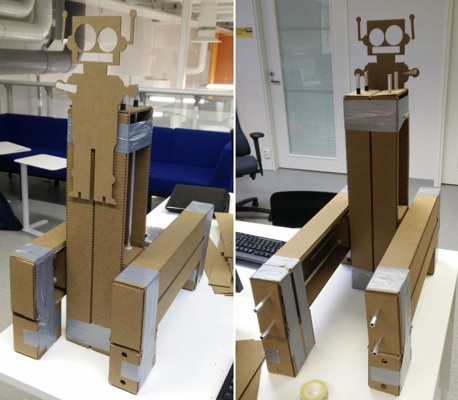
Assembled robot from front and behind
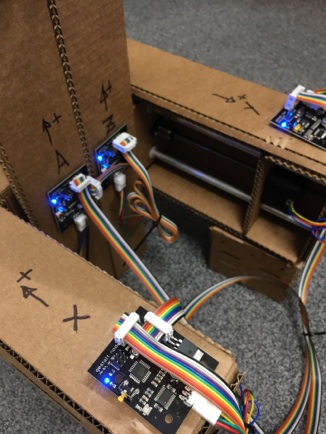
Electronics assembled to robot
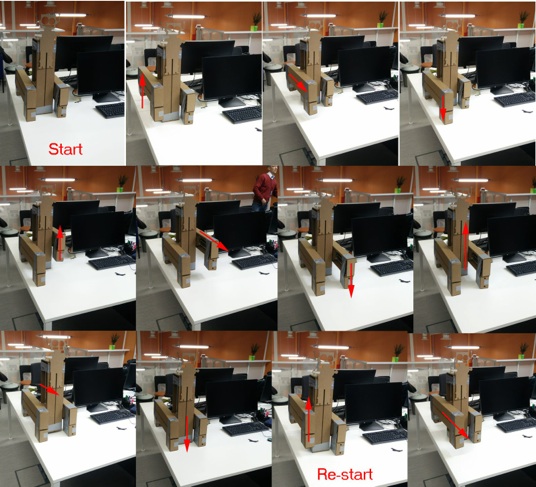
Principle of turn by turn walking mode
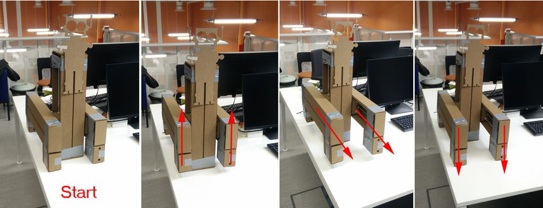
Principle of equal step walking mode

Final designing
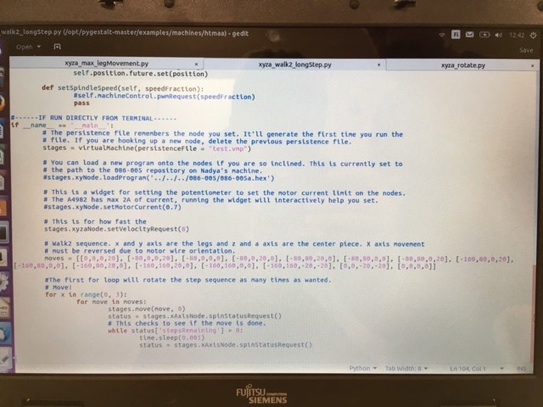
Part of our code
In future there is possibility to develop our robot further so that it recognize obstacles by itself and can move individually. Also it is possible to put batteries on our robot so it won´t need cables for electricity. There could be also led lights for better visibility of the robot in dark rooms.
There were problems during our design and production for example with cardboard box files, coding and different walking modes. More accurate reports of our problems can be find on our group members individual sites.