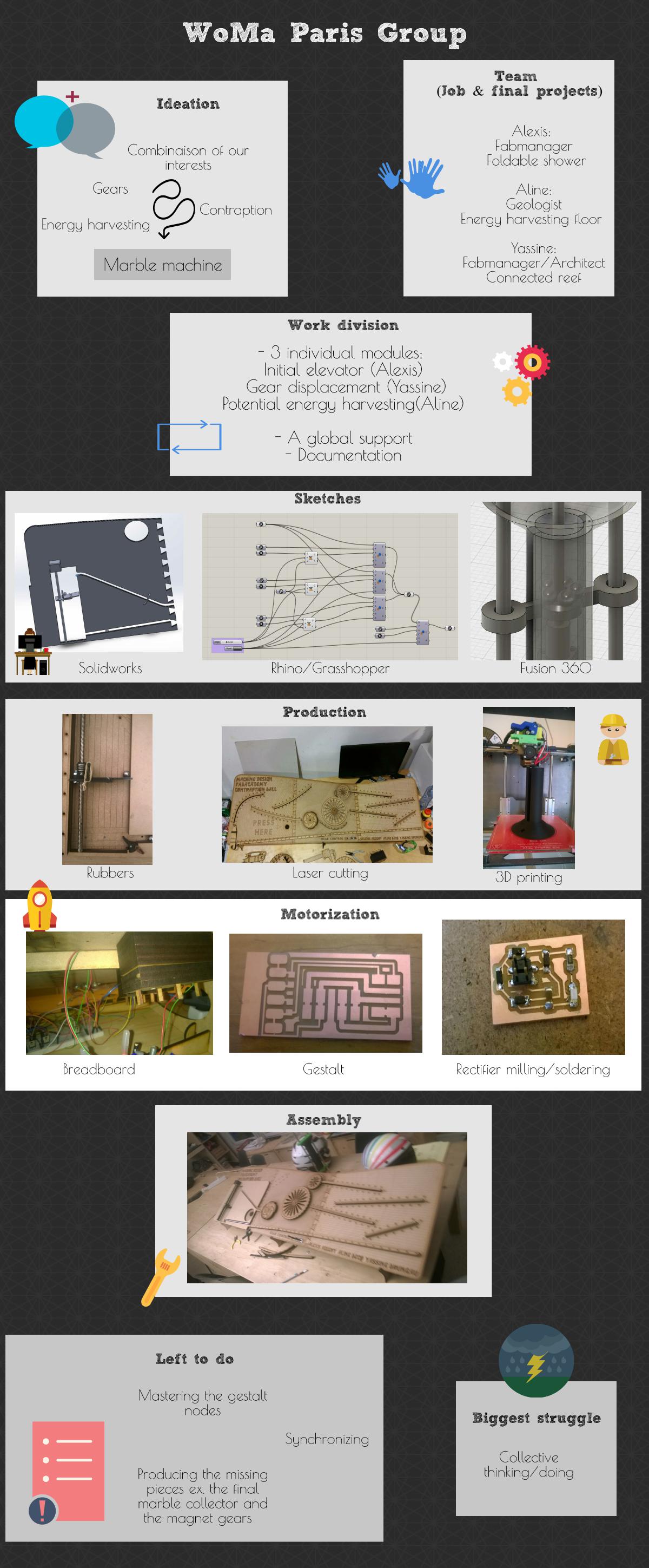
WoMa Paris group
Slide
{kind=link}
Video:
Setup
| Softwares | Fonction |
|---|---|
| Algodoo | Modeling gears and movements |
| Slack | Group discussion |
| Discord | Group discussion |
| Trello | Group project management tool |
| Rhino + Kangaroo 0.99 + 2 | Gear design |
| Solidworks | Conveyor design |
Group tools setup
One of the hardest part of a group project is to have good communication channels. So we created a Slack channel: #machine -Slack being already used by our region- dedicated to our machine project regrouping our instructors and us three. To have a place to store ideas/links, to dispatch taks we also created a Trello table. Ideally Trello and Slack should be replaced by open-source management tools. The slack and the Trello were then synchronized. Slack was added as Power-up in Trello and Trello was added to slack as app, then invite in our #machine channel.

adding Slack to Trello
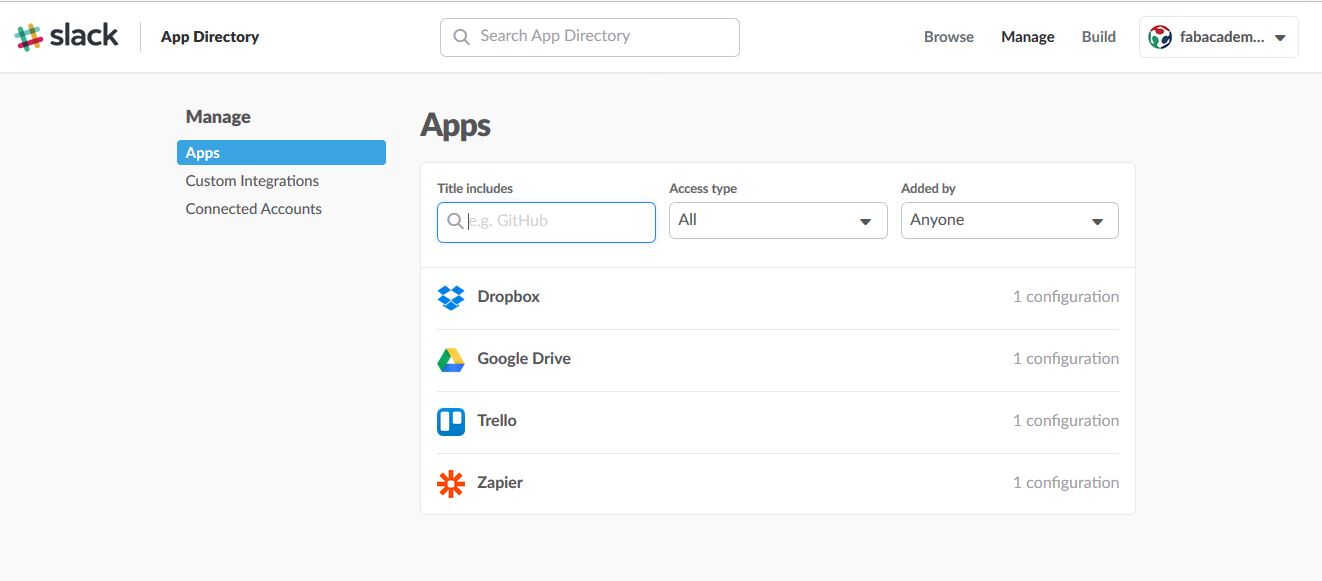
adding Trello to Slack

Trello notification in Slack
But despite the care taken in establishing those channels, they were only used by the person who set them...until tuesday!
Documentation
Aline took care of this aspect this week but we are aiming at taking this task in turn (1 member taking care of 1 week). At first we considered turning every day but as we decided to go for the usal git repo storage we are constrained by Thomas push frequency.
Documentation consists in:
- recording every step of conception
- retrieving source files
- writting the group html
So we took Aline's page template and created a groupproject.html at our git seed. We took care of copying the vendor, css and js files at the seed. A file was created to store the related images(groupproject_im).
The team
Yassine: Architect and Fabmanager
Alexis: Inquisitive mind and Fabmanager
Aline: Geologist and resource specialist
Merging ideas
The first task was to get together and agree on the machine purpose. To do so we decided to all pick a concept we wanted to work with and find a machine that regroup all the concepts. Those concepts will also help us to divide the work.
| Member | Concept picked |
|---|---|
| Yassine | Gears and movements change of direction |
| Alexis | Conveyor |
| Aline | Energy harvesting (motor > generator) |
On Thursday only Yassine and Aline were at WoMa as Alexis belongs to another fablab in the south of Paris. We took several roads.
One of them was Hacking motors:
- Making a generator out of a stepper motor was one way of hacking motors
- Using the motors as moving ballast.This could have been used to build a spherical bot.
The other aspect was Gears:
- for an easthetic purpose such as shown in this video which also displays a nice Grasshopper workflow:
Another was Energy deperdition: We kept the motor into generator concept and tried to merge it with gears and movement. We thought about a mechanical machine which would display the retrieved energy after several gears. On Friday Alexis joined us for a morning session. He added his concept to ours; he is keen on conveyors belts.
So a new axis was Conveying and sorting: Alexis showed us videos to help us understanding all the different conveyors types possible, such as the Lega contraption competition.
Alexis also has multiple unused colour detectors at his lab so we looked at combination of conveyor and sorting mechanisms such as:
Material at disposal
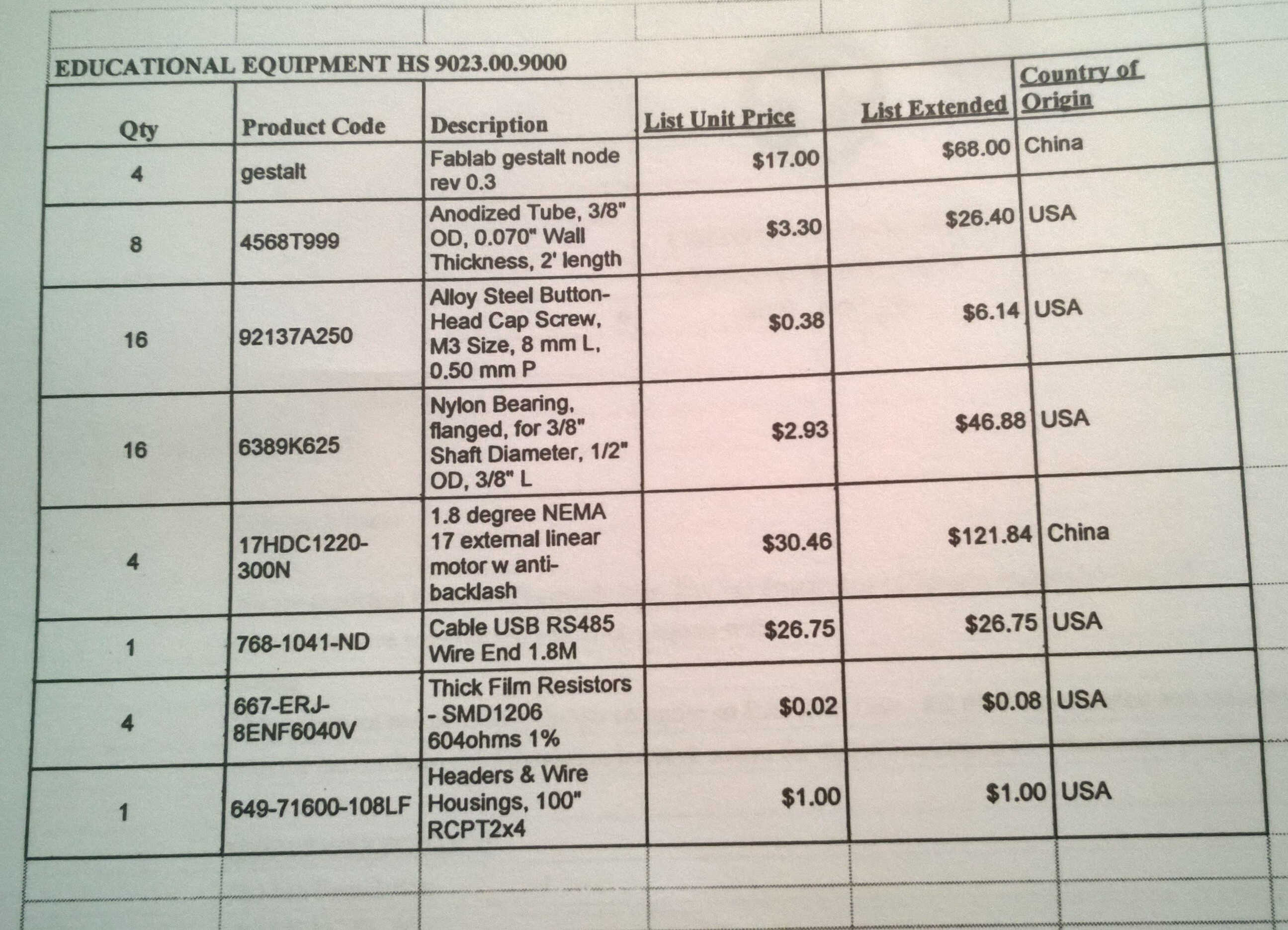
The material available also guided our reflexions. So we unpacked our machine box.

unpacking
FabAcademy table
We also looked around at Woma for machine material. We found gears, ball bearings, a potentiometer, a 3d printer open belt and some 3D printer motors.

WoMa stuff

potentiometer

belt
additional motors
After this hunt and after discussing with Alexis our list of material was the following:
| Material | Number | Model |
|---|---|---|
| Stepper motors | 9 -7 with axis -4 wires | RB step motor 17HDC1220-300N |
| Gestalt nodes | 7 | |
| Shafts | 14 | 9.53 mm diameter |
| FTDI cable | 2 | |
| Belt | 1 -open- | |
| Ball Bearing | A dozen | |
| Potentiometer | 1 | |
| Colour detector | 1 | |
| Colour detector | 1 |
Making the most of our material was also a central idea.
WoMa inspiration
We looked for motorized inspiration around the lab. 3D printers are particularly relevant as our Fabkit motors are 3d printer motors. A gel dispenser built at WoMa for a robotized arm shows us a great assembly example.
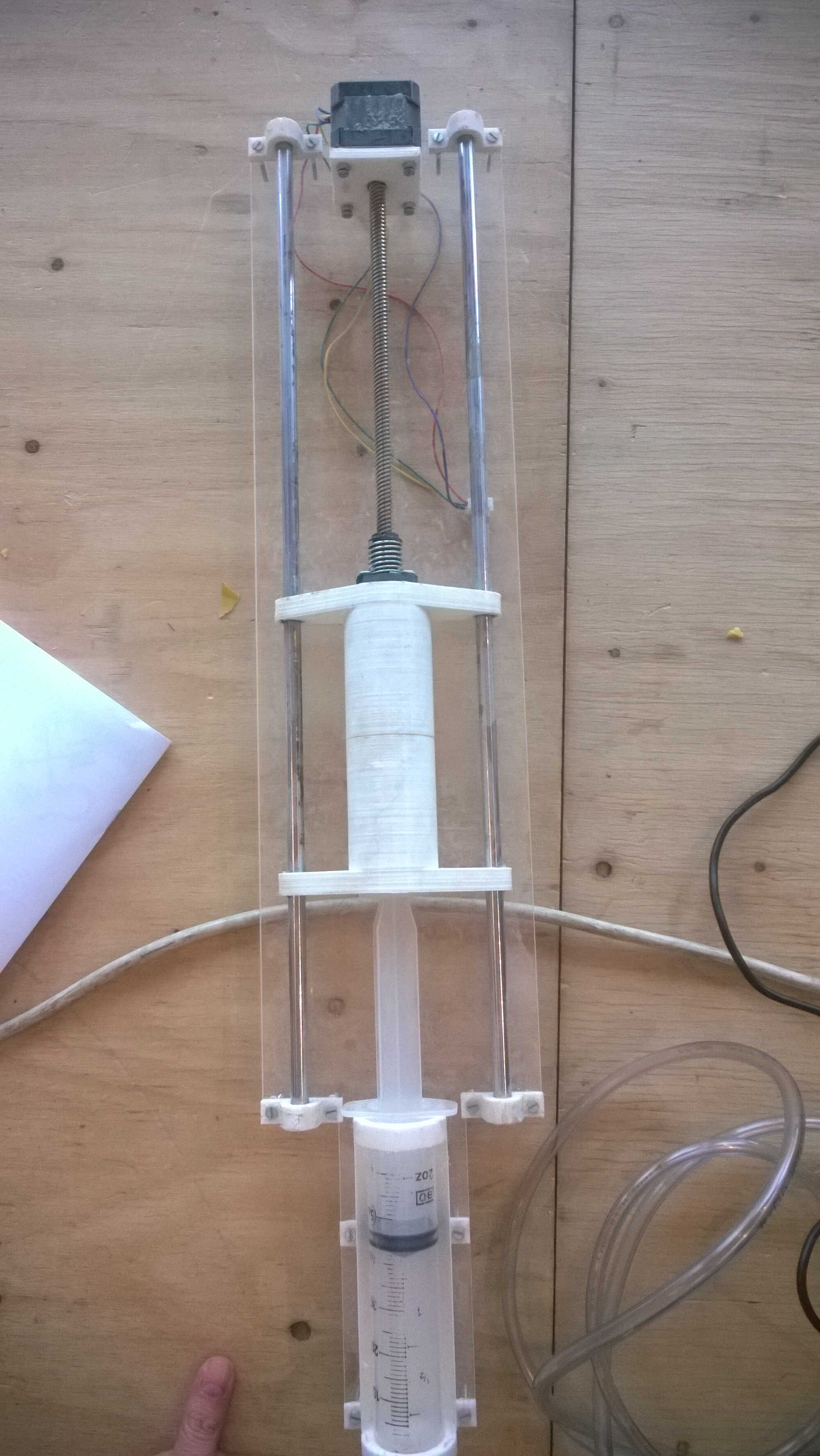
syringe
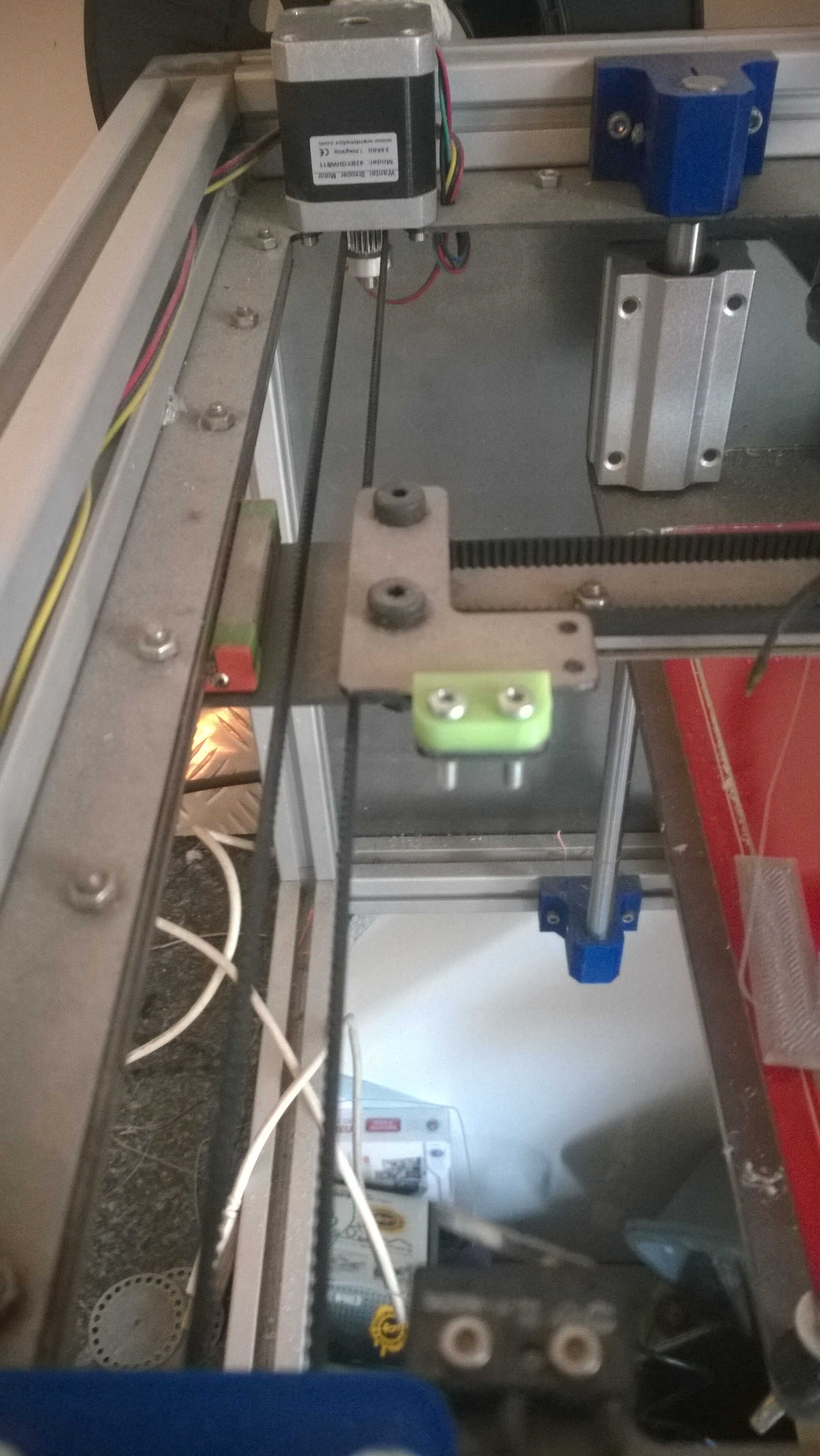
3D printer belt system
Handmade sketch
First we tried to draw some sketches.
Yassine's vertical conveyor
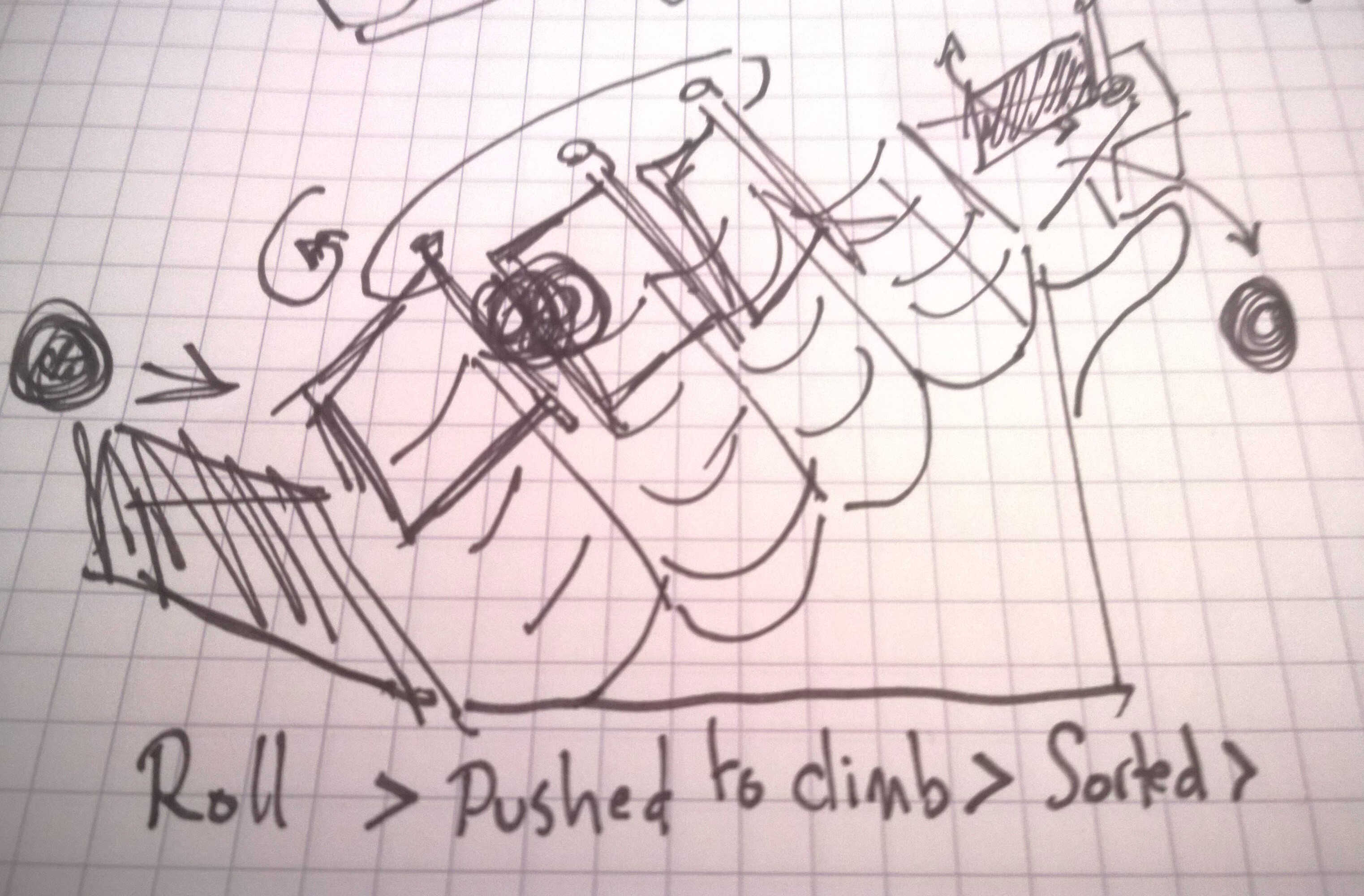
Aline's machine
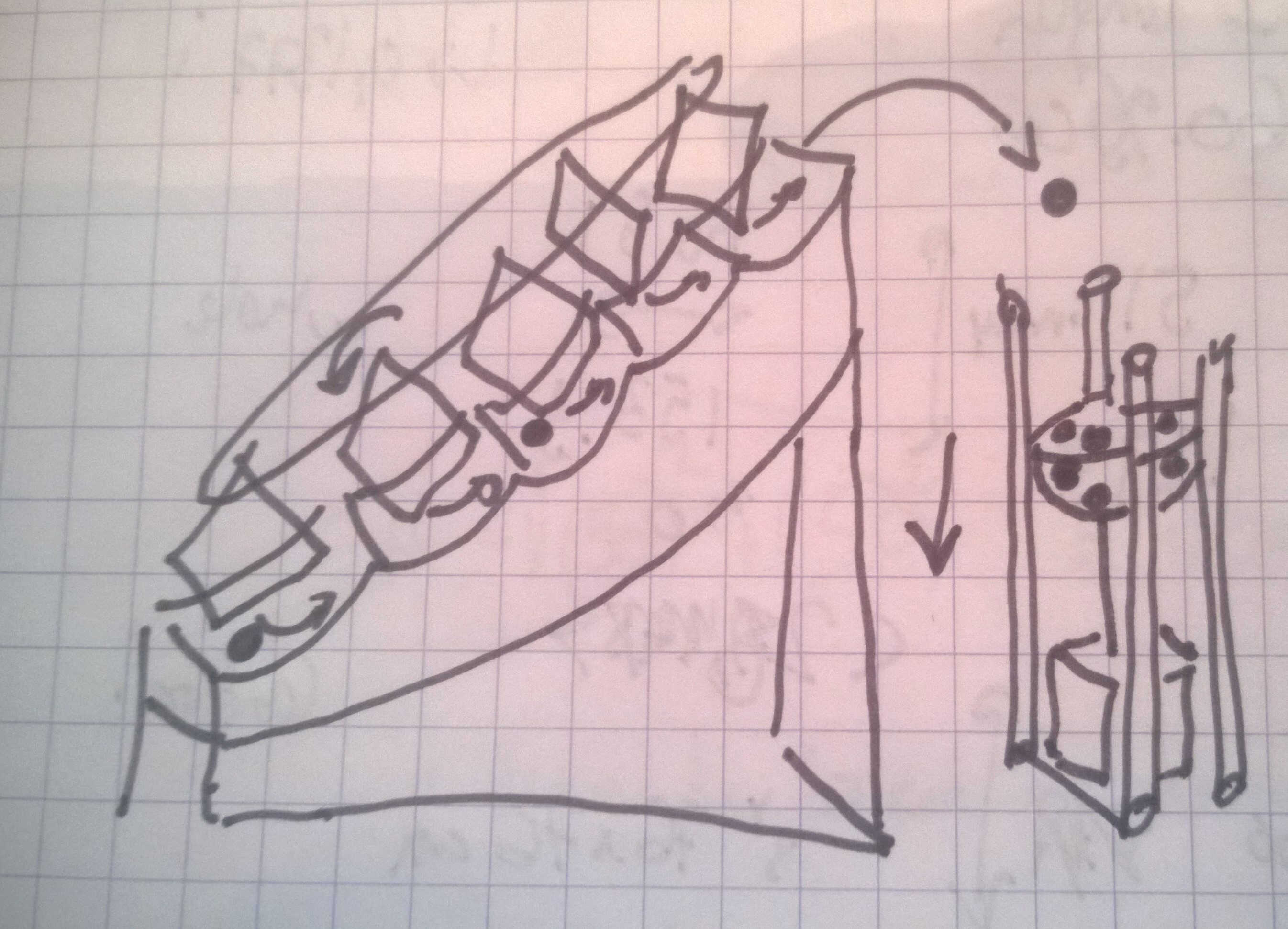
Collector generator
Meca modelization
Algodoo
Then we found a Youtube video made with a software called Algodoo. It can be used to model mechanism and displacement but it is limited as the distance can't be specified and as it's only 2D. Here you can see the results of the simulation of cinetic energy harvesting
3D pieces database
We also found a website where CAD models of commercial mecanism parts could be retrieved fro free.
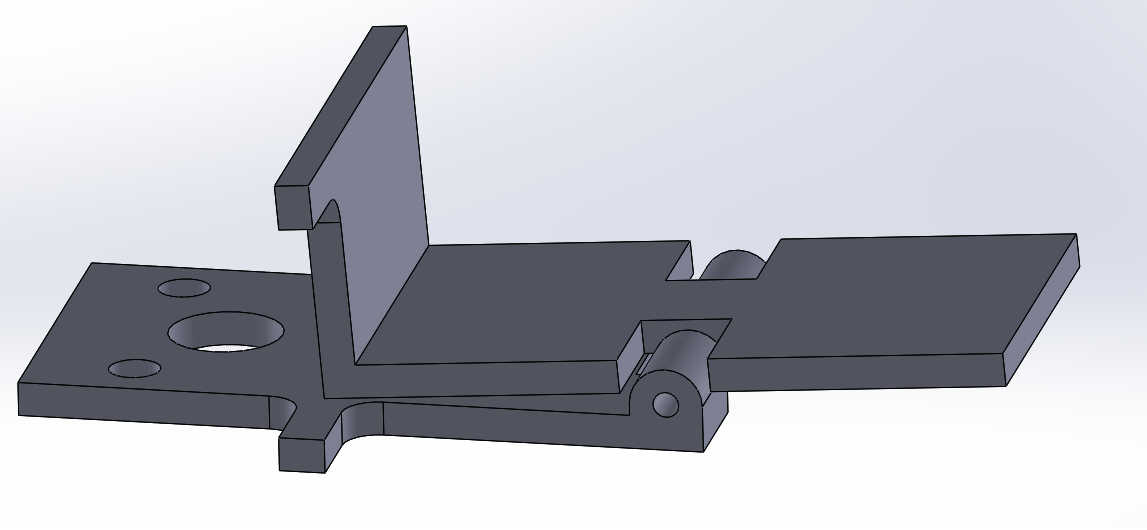
Solidworks modular step
Alexis made a first model a step module with Solidworks.

hand sketch

Solidworks assembly
Alexis then changed direction and went for an elevator-like design.
marble basket

Alexis module assembly
Rhino+Grasshopper gears
Yassine created an infinity mecanism. He used Kangoroo physics, a Grasshopper pluggin.
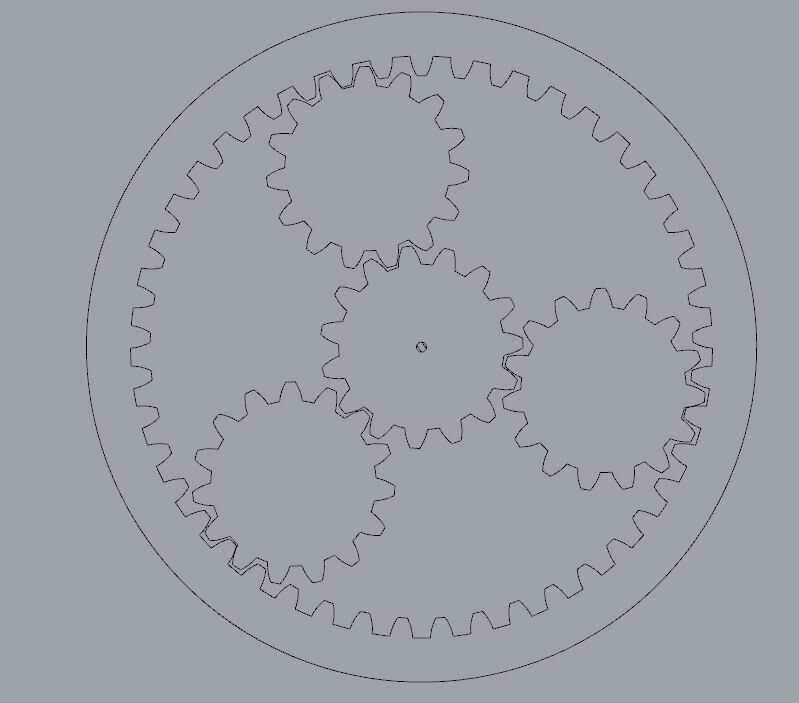
mecanism assembled

Grasshopper flow
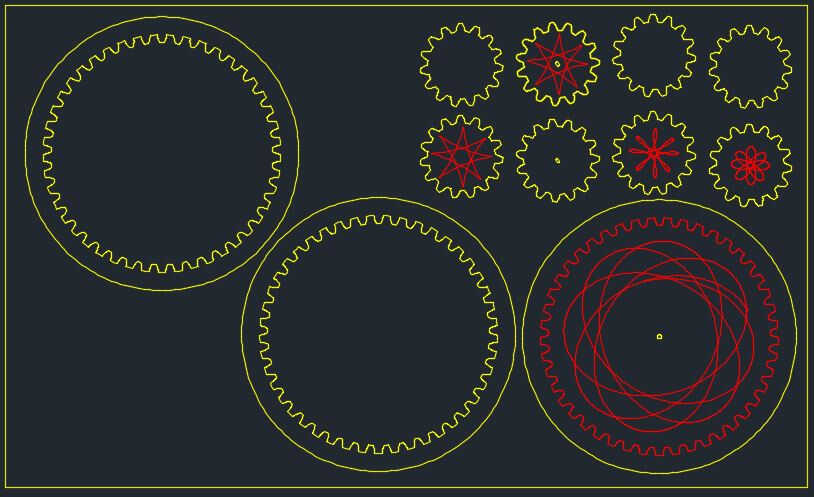
Rhino visualization -with trajectories

Final module design
Fusion 360 harvesting module conception
Aline drew her module in Fusion 360. She designed 2 versions. The first one was meant to test the feasability of the harvesting: collecting the marbles and enabling their weights to drive a bucket down.

first module

first module bis
The second version was an extension of the firt but the marbles could be recovered and recycled in another round.

second module

see through

with marbles
Her workflow was the following:
- reproducing the pieces at disposal in Fusion (such as the Nema 17 stepper and the shafts) as the CAD models online did not correspond exactly to the stepper motor we had
- assembling them
- creating fitting additional pieces
- animating it for better understanding
- exporting in stl to print in 3D
Several trials were needed in order to print the desired module.
The stl source files can be found here: base, upper part, cylinder, moving part.
General architecture
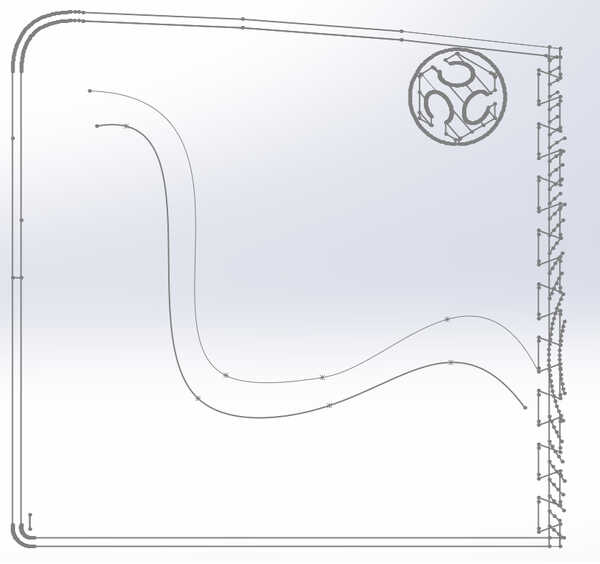
The last step of the sketching was the definition of the support which would bring all our modules together: an inclined plane of wood ended being consensual. Alexis designed an inclined modular support and Yassine drew a first draft of the superior layers to be press and fitted together.
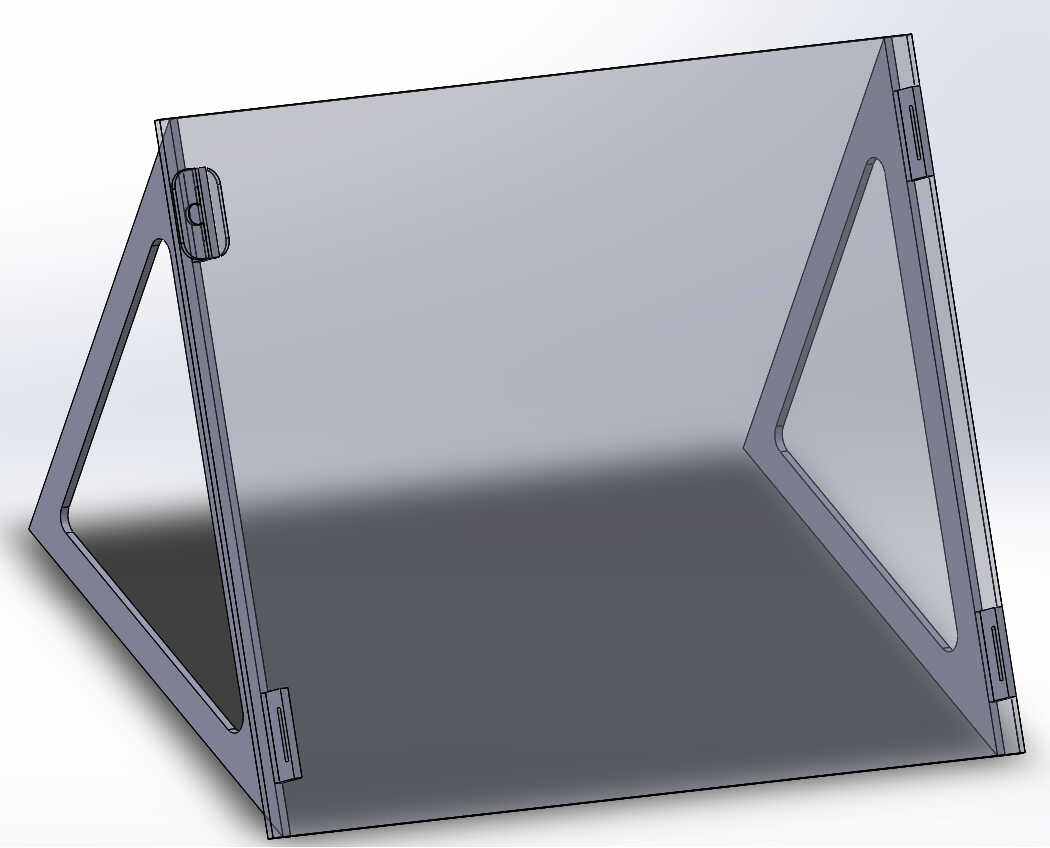
Alexis support

support joints
Laser cutting
Yassine cut his first draft of the superior layers to be press and fitted together.

superior layers
Laser cutting is his favorite process so he build his gear module with it as well as the layers.

gear demo with cardboard

lasercut pieces
Material purchase
Marbles Yassine and Aline went to a bearings shop: S.O.R.B. industries 1001 roulements and purchased the marbles. The choice was relatively limited so they picked 40x 12 mm stainless steel marbles. Each marble weights ... g. They also looked for shafts bearing but couldn't find appropriate ones because this suplier is working with europeans standards.
Solenoid Alexis wanted to use a solenoid to transfer energy to the marbles at the start of their course. So he bought one.
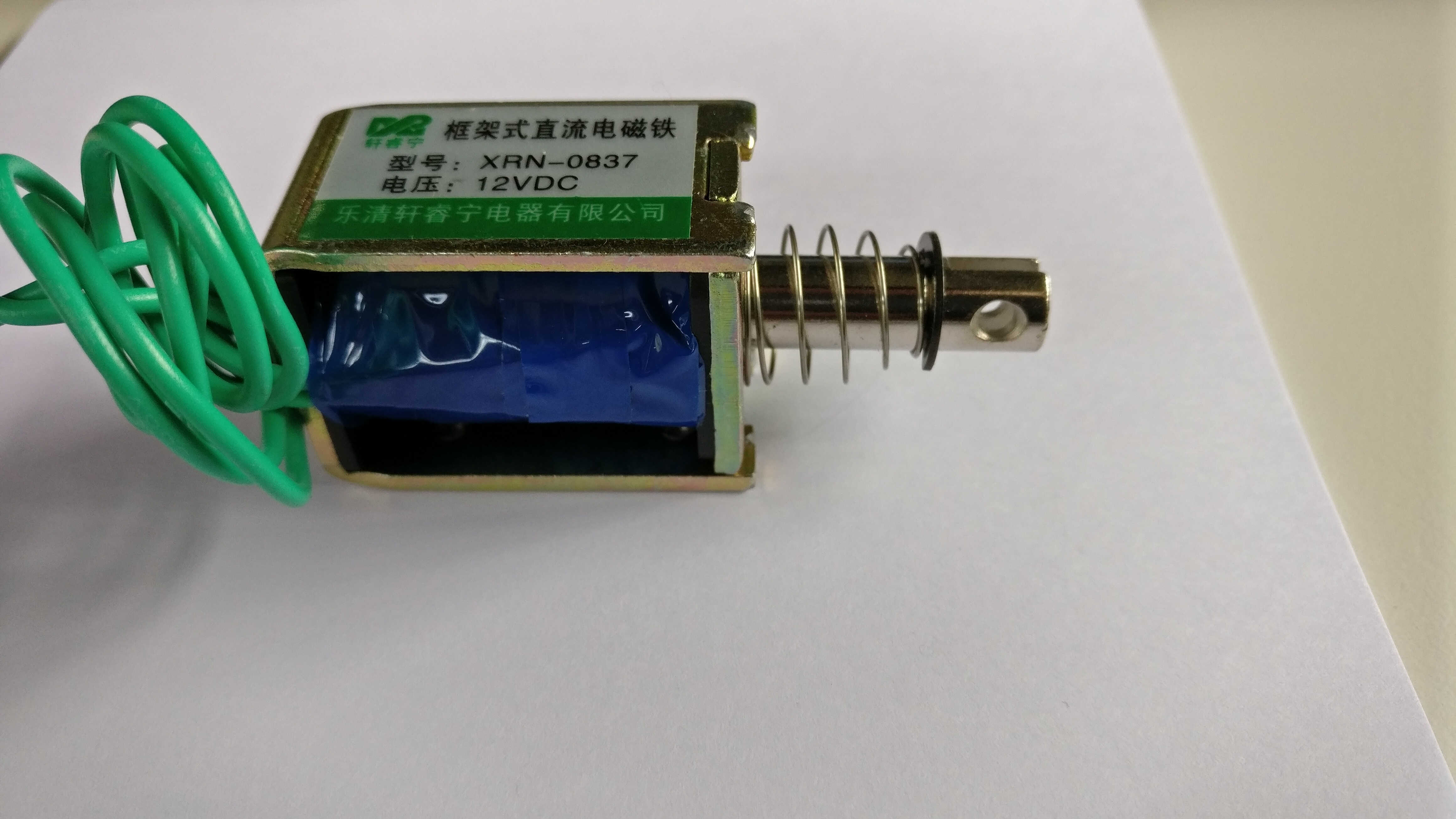
chinese solenoid

buttons

potentiometers et al.
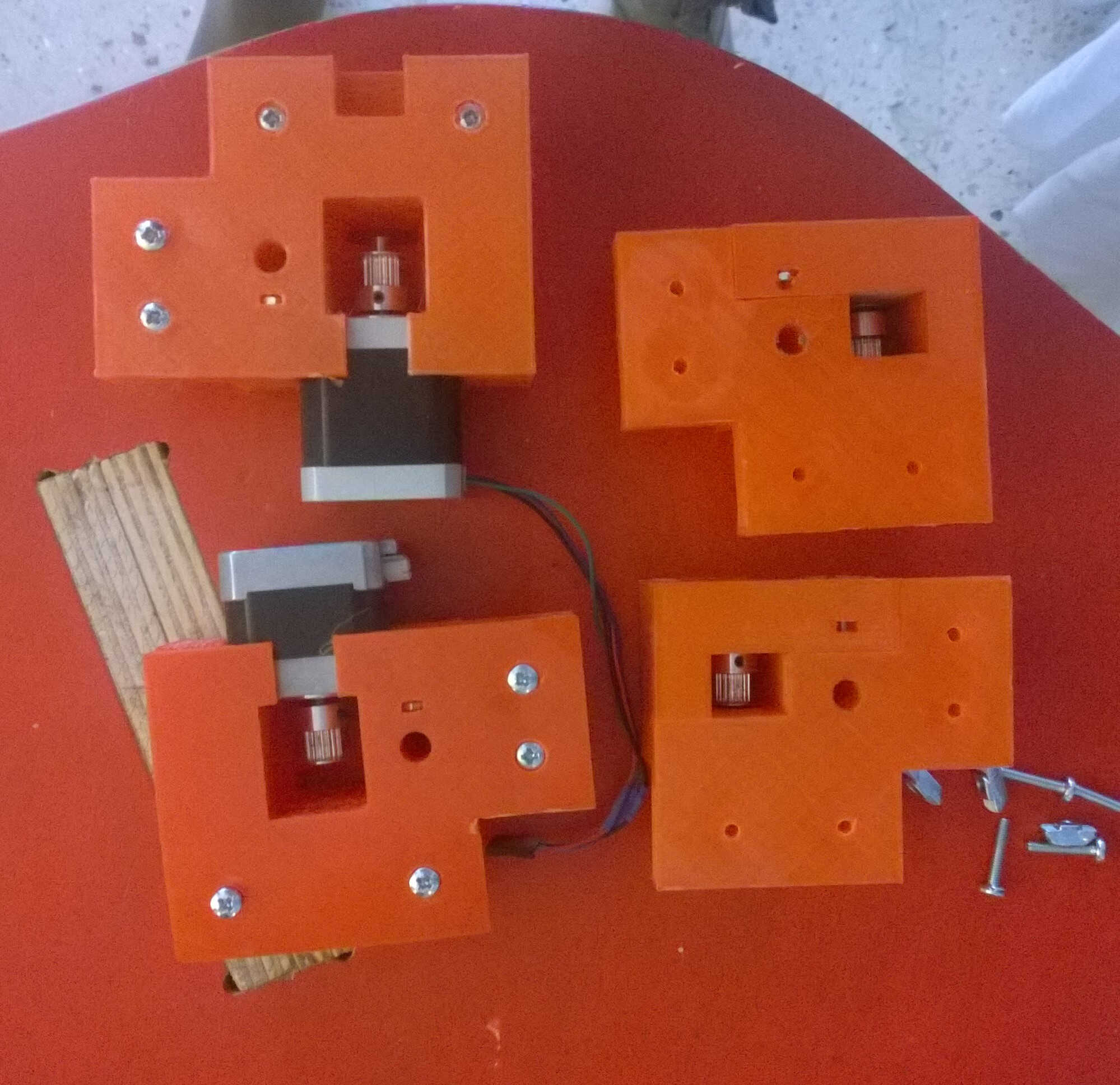
3D printing
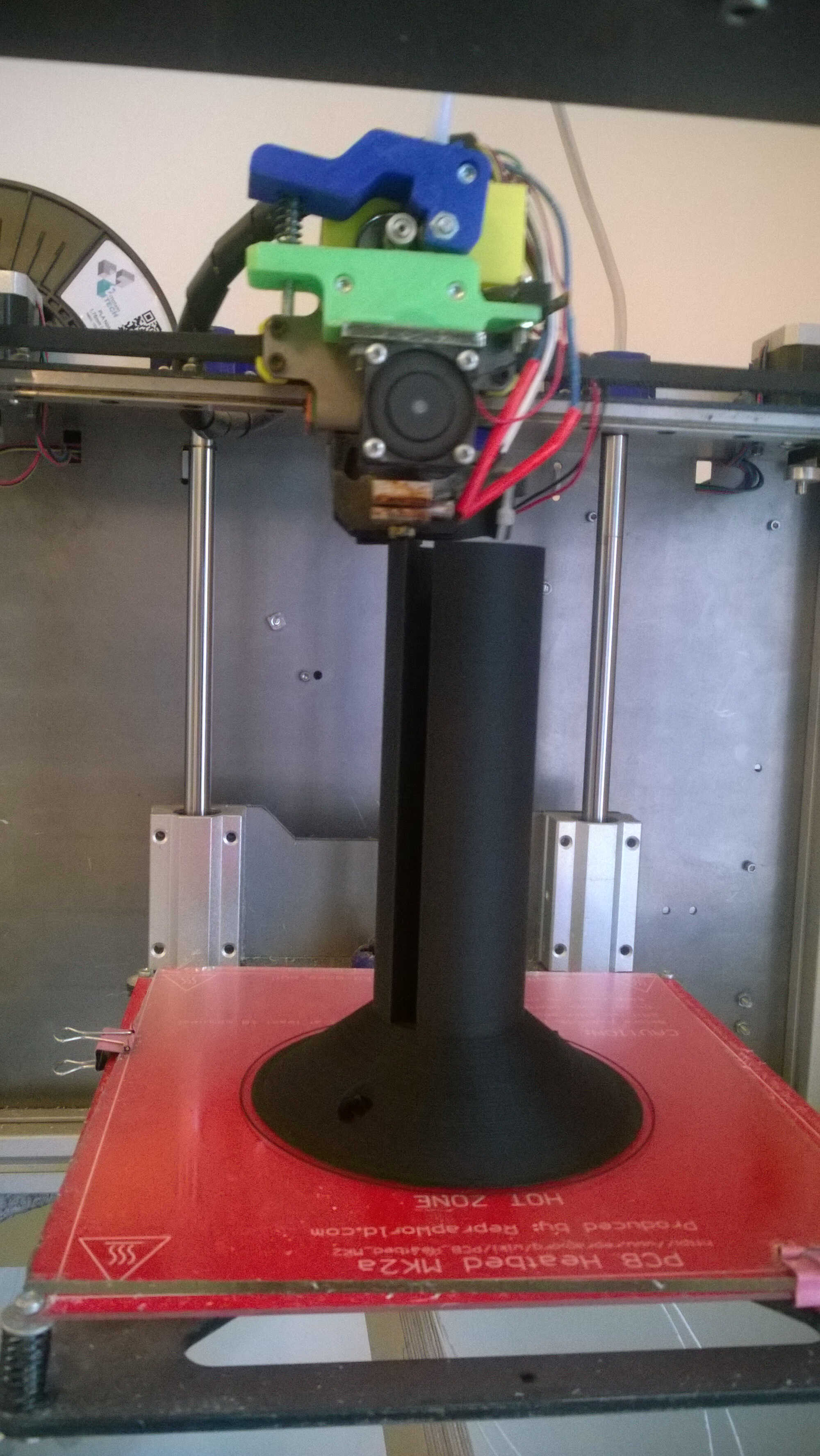
Aline produced the pieces of her Fusion 360 module with Woma 3D printers.

upper piece

marble holder
Several trials were needed to get the right fit. First the holes were too tight for the shafts, then for the upper piece the 2 holes didn't ended up with the same diameters as the surrounding topography impacted them. Also when printing the funnel the wall thickness was too thin and the overhang too pronounced. The central piece had to be redesigned.

adherence issue
printing after redesign
Energy harvesting
Aline first task was to validate the use of a stepper motor as generator. She did so in 3 steps:
- understood how to rotate the shaft with the minimal effort with help of material found at WoMa
- tested LED lighting with a breadboard
- built a PCB with just a LED and a rectifier to connect to a pair of the stepper.

mechanical test
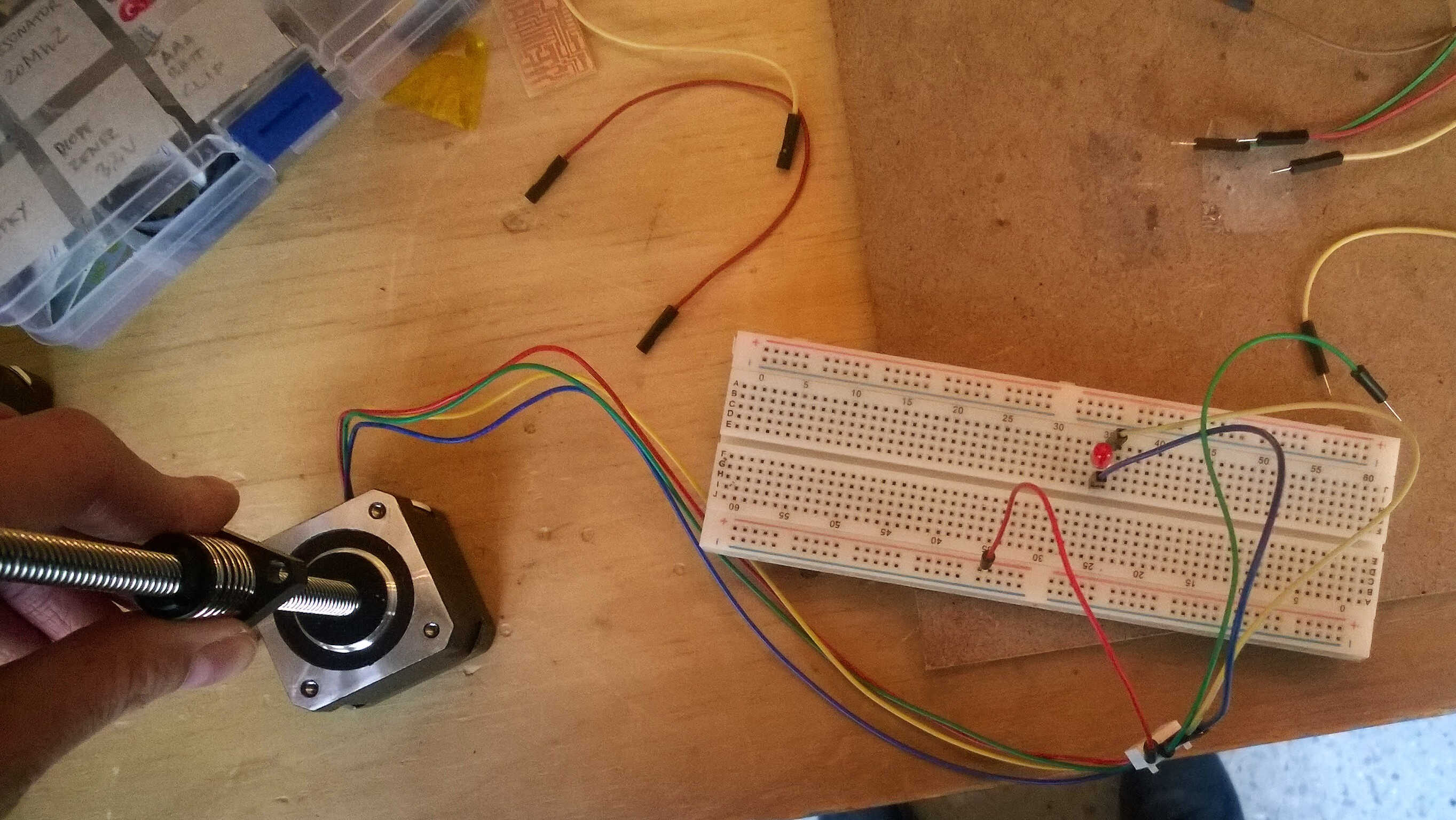
breadboard led test

PCB schematic

rectifier PCB
For this last step she was inspired by this video:
In this video it looks like it is possible to sum the pairs and then rectify them. In other literature extracts each pair is rectified separately.
The conclusions of Aline's tests were the following:
- The descent requires the smallest effort if the force is applied along the shaft, if the spring is compressed, if the pairs of poles are not connected electrically
- It is not possible to sum directly the pairs of poles, better to rectify each one separetely
- It is possible to lit up a led with a stepper motor as proved here:
The PCB source files can be loaded here: the led board and the ATTINY board.
Gears
Yassine assembled the laser cut pieces, tested his gears with Arduino and breadboards. He put his cardboard mechanism in motion with motors and potentiometers.

assembled pieces
Elevator
Alexis made some theoretical tests to pick the right solenoid and the right curvature of the marble course.
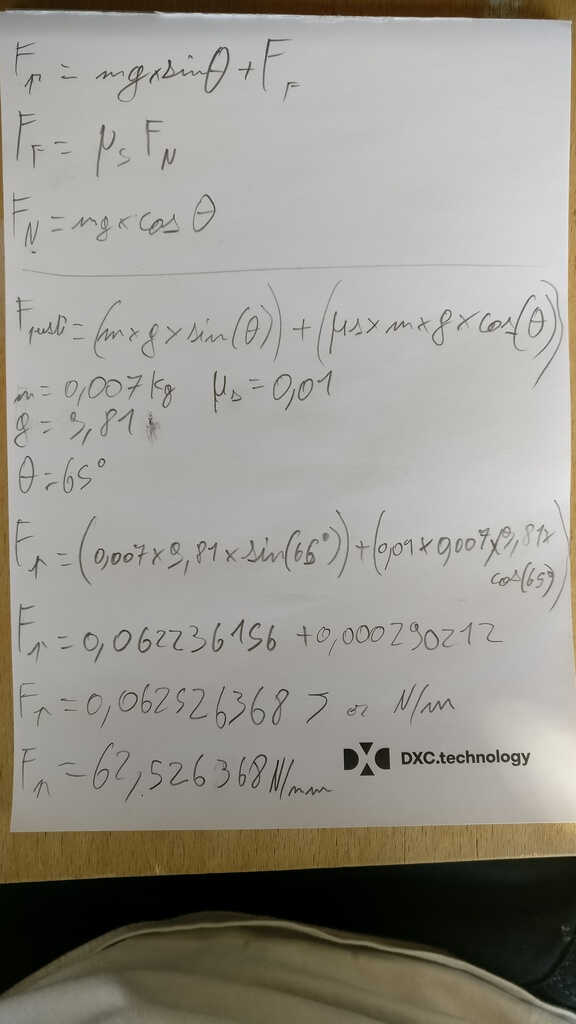
physics to the rescue
course curvature
As the task splitting wasn't that successful we split and went on the next assignements. We carried on in our free time, separetly.
Aline
Aline wanted to understand the gestalt nodes, how to program them as well as trying out Nadya's cardboard as she thought it could help. She documented first those researchs on her weekly pages then reunited the whole in her Week 9.
Situation analysis
An managerial analysis of the group situation can be found here
Cardboard stages
The cardboard stage construction can be found here
Fabnet, Gestalt installation
The Fabnet milling/soldering as well as the installation of gestalt/wxgestalt -and all their prerequisites- and the initialization of nodes can be found here
Conclusions
She learned how to simultaneously control stepper motors. She also realized her module had a major conceptual default the main cylindrical part allowed the marbles to come down but it wouldn't allow a motorized rise as it would not rely on a straight movement but rather a coiled one. Hence the main piece should probably replaced by some kind of basket. As Yassine is using DC motors, and she doesn't think they are compatible with Gestalt nodes, this would require adding an Arduino board and communicate with it through serial bus. The other possibility is not to use the gestalt nodes as no precise coordinates are needed for this machine but rather a motor shield for Satchakit or even simpler H-bridges + Stepper library. Yassine looked at those possibilities. As for the cardboard it doesn't seem to be a great addition unless it is reworked.
Yassine
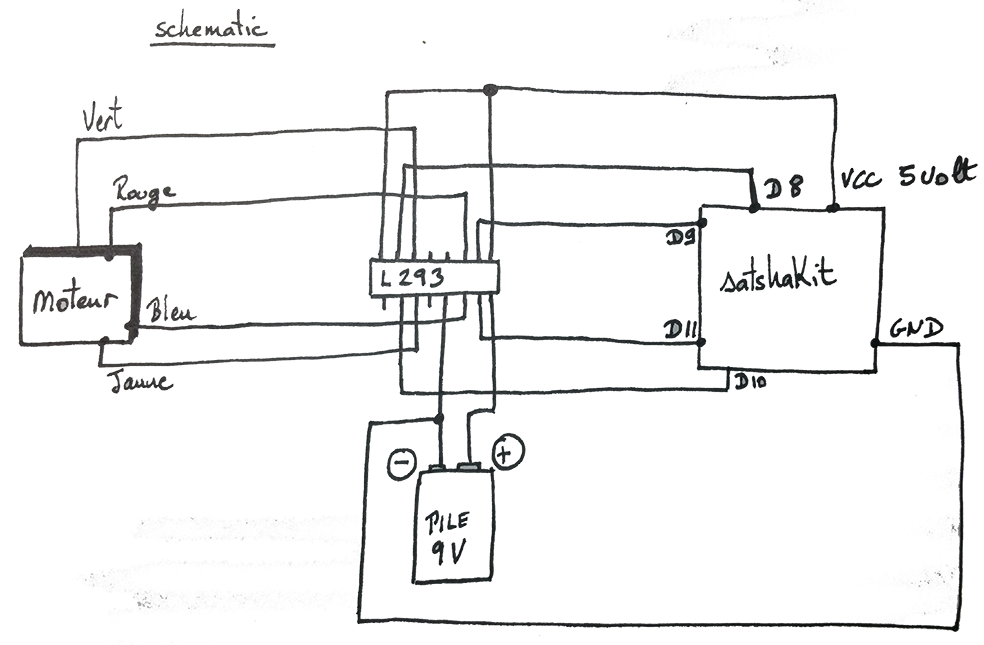
Prototyping with a l293 component + arduino nano
Schematic

PNG traces and holes
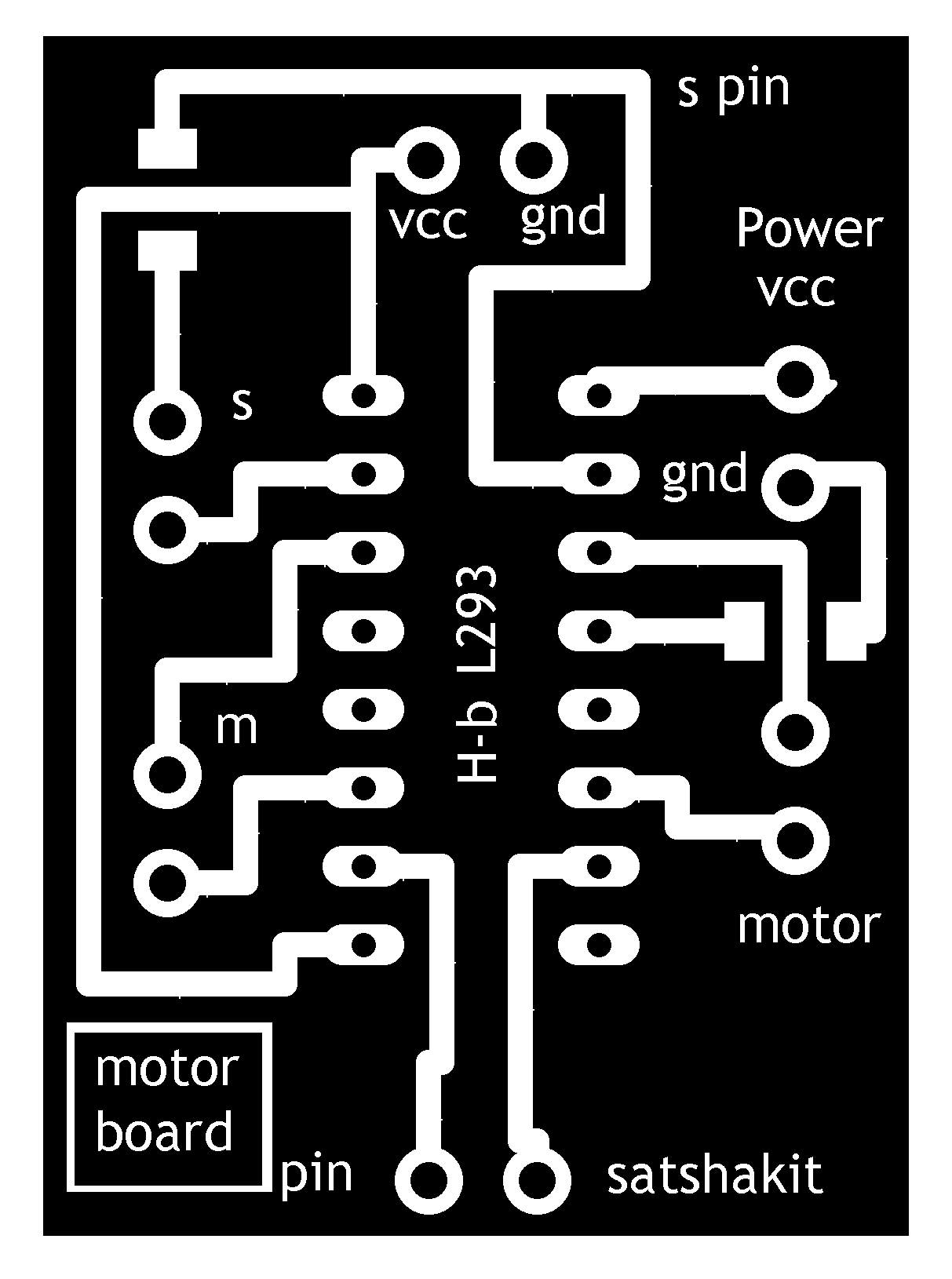
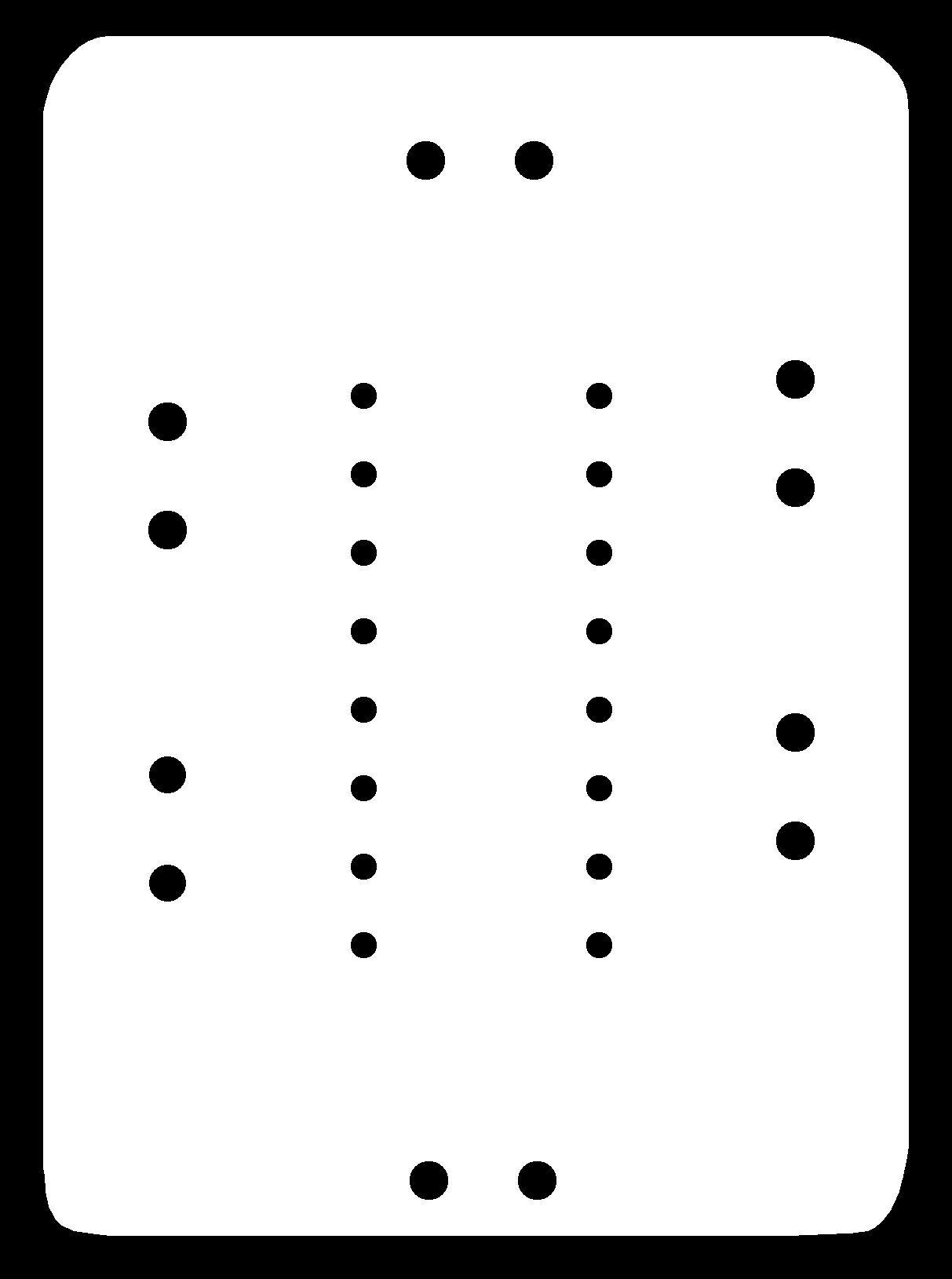
RML FILES
Download Traces Download Hole and border
Board milled
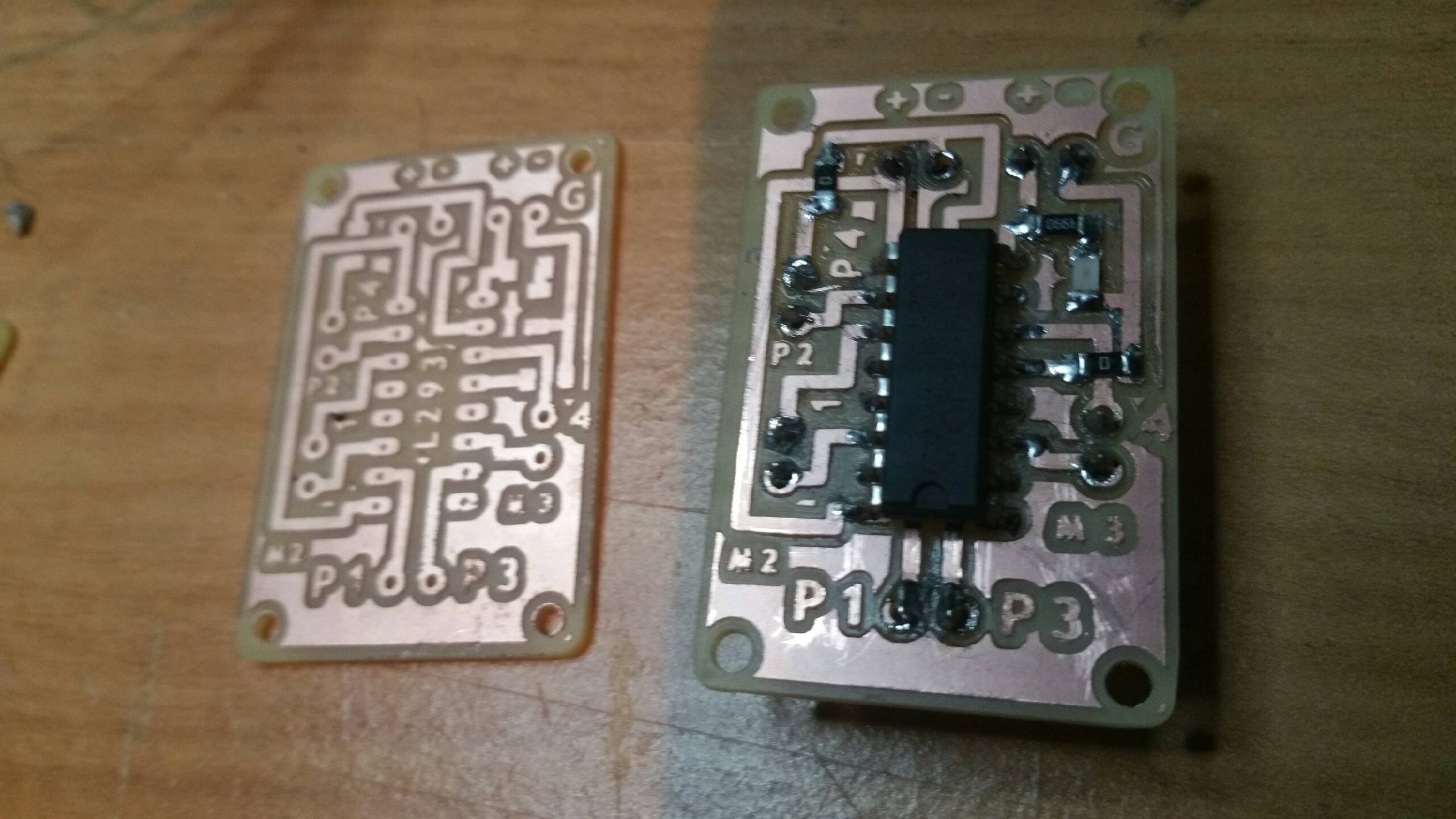
milled and soldered 5V board
Soldering components
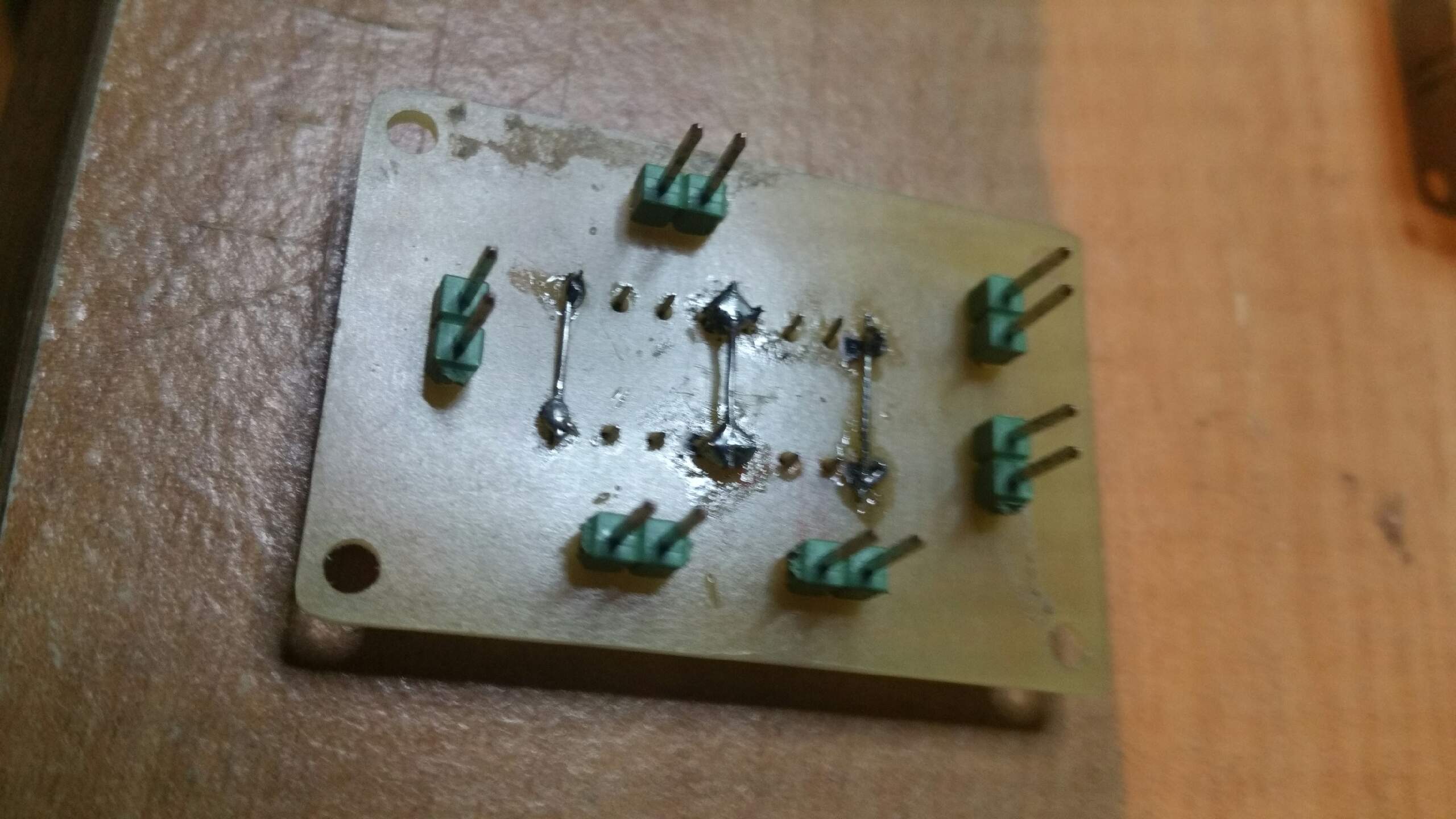
milled and soldered 12V board
>Yassine tested the control of motor via L293 with a board powered with 5V coming from the Arduino. It worked ok. He then tested with a board powered with an external 12V source and it worked more painfully.