FabAcademy2017 - Projects
Interface and application programming
May 17, 2017 - Week#16
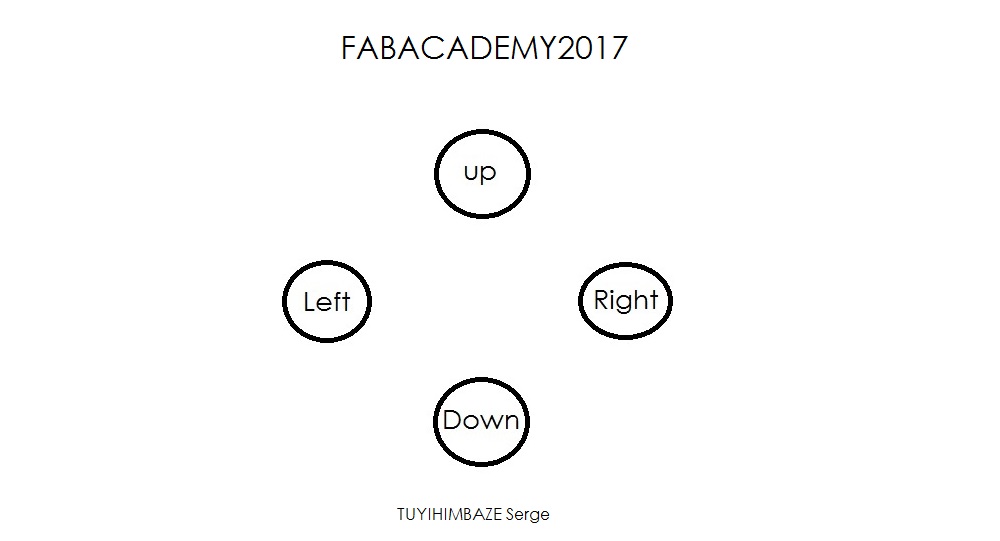
For Interface and application programming, I made a simple interface that I can use to move my motors in both directions. Left, Right, Down and Up. and it be able to know when it is day time or night time.
I sketched a draft interface
My Motors's interface is programmed using different languages, I used Php to receive signals from pressed buttons, python to send data to Arduino and programmed arduino to control motors, and I also used HTML to create interface which is accessed via web.
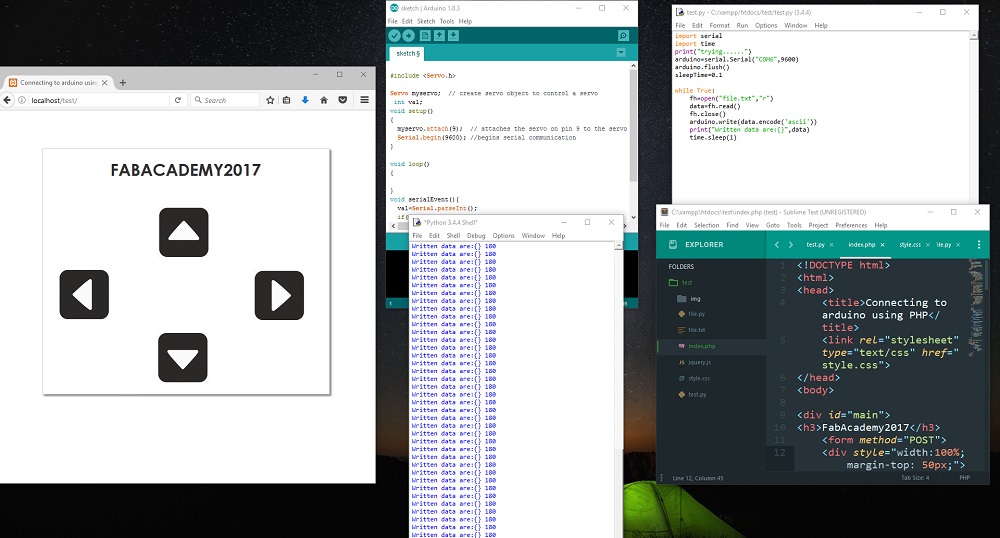
The code and files I used are attached here at the bottom of the page. I just listed here some codes I wrote while making interface.
Below are the codes I used
/*I used Php to receive signal of pressed button.*/
function writeData($data){
$fh=fopen("file.txt",'w');
fwrite($fh,$data);
fclose($fh);
}
if(isset($_POST['top'])){
writeData(1);
}
else if(isset($_POST['right'])){
//open file for output
writeData(180);
}
else if(isset($_POST['left'])){
writeData(180);
}
else if(isset($_POST['bottom'])){
writeData(1);
}
/*I used Python to send data to arduino board.*/
import serial
import time
print("trying......")
arduino=serial.Serial("COM6",9600)
arduino.flush()
sleepTime=0.1
while True:
fh=open("file.txt","r")
data=fh.read()
fh.close()
arduino.write(data.encode('ascii'))
print("Written data are:{}",data)
time.sleep(1)
/*Here are arduino codes to control motor.*/
#include
Servo myservo; // create servo object to control a servo
int val;
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
Serial.begin(9600); //begins serial communication
}
void loop()
{
}
void serialEvent(){
val=Serial.parseInt();
if(val!=0)
{
myservo.write(val);
Serial.println(val);
}
}
Finally my application and interface I programmed is ready to control motor. here is a video that shows how it works.