WEEK 9
Mechanical Design
WEEK ASSIGNMENT: Design a Machine, Build its parts and operate Manually
1. Day 1-2
This week , it was a group assignment so after Dr.Neil's Recitation, we all were told the groups alloted, in my team it was Me, Mahavir and Jatin and other team was arundhati, abhijeet and dipali.
I and Mahavir are staying in Vigyan Ashram and Jatin stays in tata center bombay, so we had to discuss how we will manage work and team with my team members being in different places.
but we kept that aside for the time being, we discussed a brief about the week , we have to inform our instructor by next morning what machine we plan to make.
Next day, all instructors, fab academy students and Subirji (teacher in Vigyan ashram and best person to discuss ideas) sat together, discussed the projects for other team, they finalised they want to do Wall painting machine.

We took more time because we wanted to take inputs of all the three members of the team.
We discussed different projects, their possibilities, mechanisms , functions and applications etc, we discussed more than 20 projects.
Finally we decided, Light Art Machine, which will have x axis and y axis
Our focus was not only on the functions but on the mechanism of the machine, we discussed the number of axis we want etc.
We also decided to not distribute work among each other yet and let each one of us learn and explore every aspect of this Project and decide later about individual contribution.
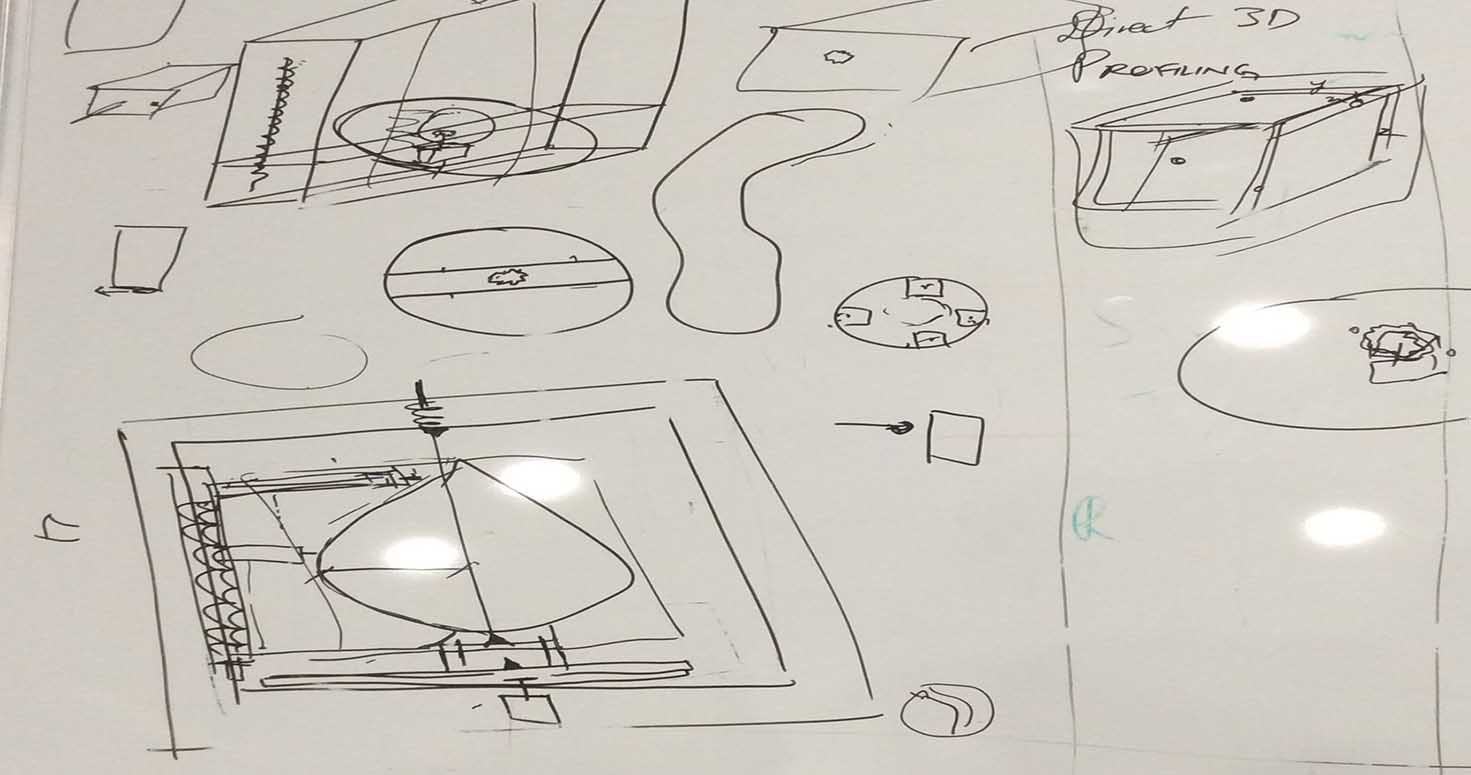
On the same day, we came up with the basic sketch with the help of subirji. Our instructors set 3 prime objective of this project for both groups, that we should be able to learn and do:
1. Computers
2.Microcontrollers
3.Motors
and I set one more objective for myself,
4. To not only do the set procedure in this project and go back with a high learning curve
2. Day 3-4
On these days, I went through fab academy resources becaus ei had no clue about the parts, assembly of a machine required for our machine.
I went through documentations of 2015-2016 but couldnt find much.
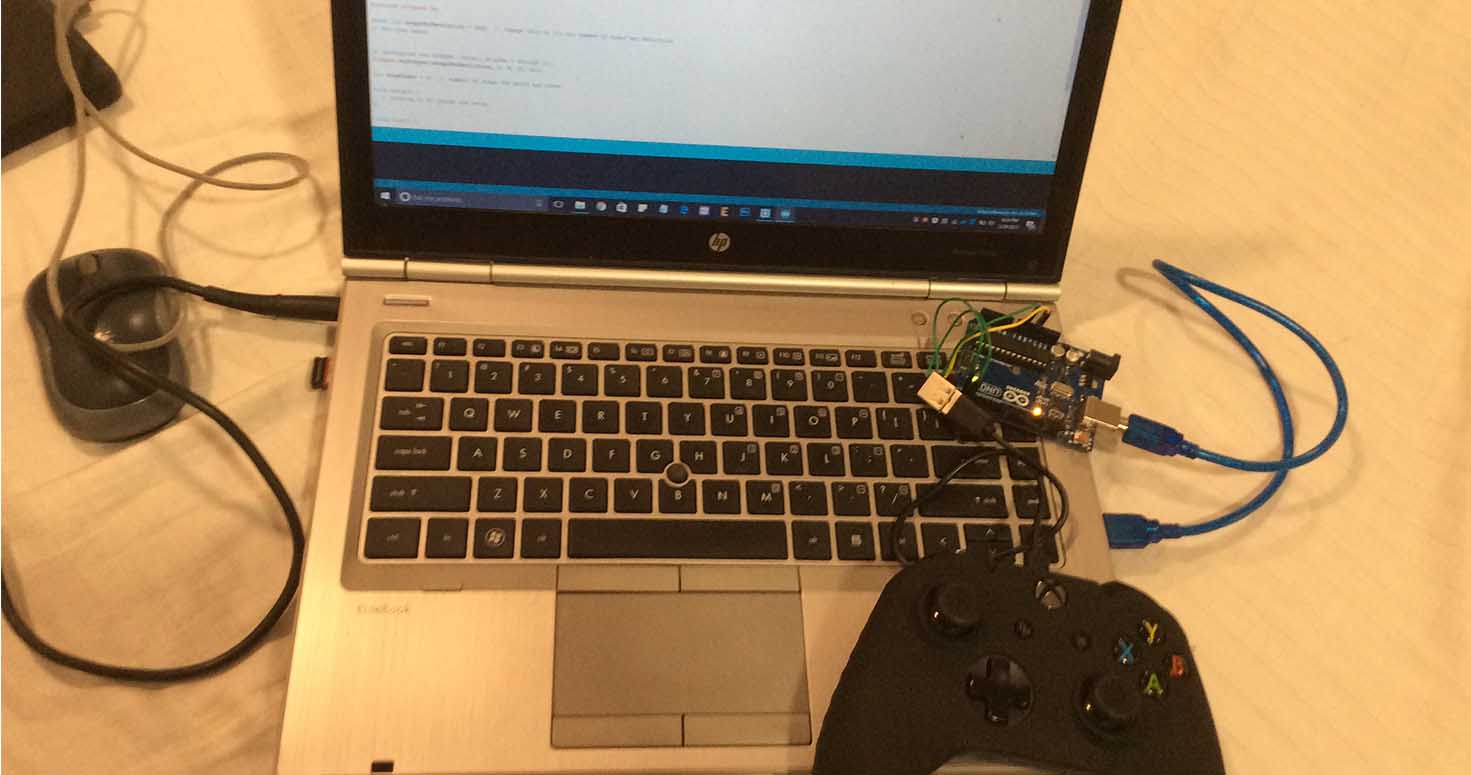
I started working on 3D connexion space mouse but then i didnt find any resources about it online, so i planned to start with xbox 1 controller i have to use for our maker machine if possible, i found resources in which people used it with servo motors so i thought i should try it.
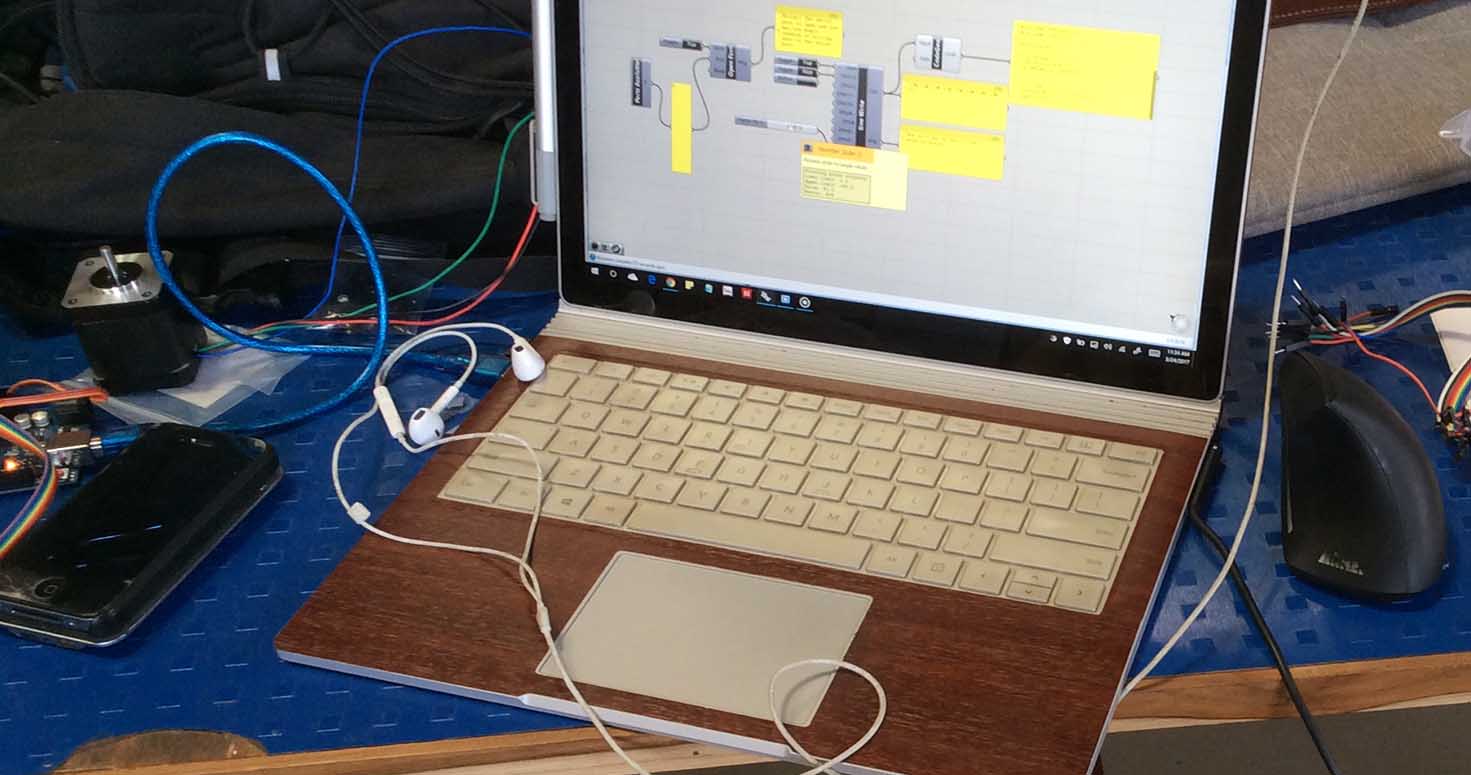
Beside that i also helped my team mate mahavir and learnt grasshopper and firefly for running servo and stepper motor.
Well, we started with that first because we felt thats where we will get stuck so wanted to learn if we need more time for electronics or designing.
We uploaded arduino IDE in the arduino, then servo motor or stepper motor code to the arduino uno.
Then we generated a workflow on grasshopper , generated code and bravo, we were able to run the motors.
Well, we also went through some 3-4 axis examples in grassopper to understand if our machine axis can be worked out on grassopper too.
3. Day 5-6-7
I went to IIT bombay's tata center of Design and technology to work with Jatin , firstly we discussed the design of our machine.
How parts will be placed, what mechanism we want.
We discussed that we would like to have X axis and Y axis. Machine consisting of 2 stepper motors. We also discussed many possibilities of improvising it.
We went ahead referring 3 different type of Machines to understand mechanisms.
I refered :
1. Rolland Modella
2. Ultimaker 3D
3. CNC miller, we disassembled this machine to understand the positions, mechanism and working

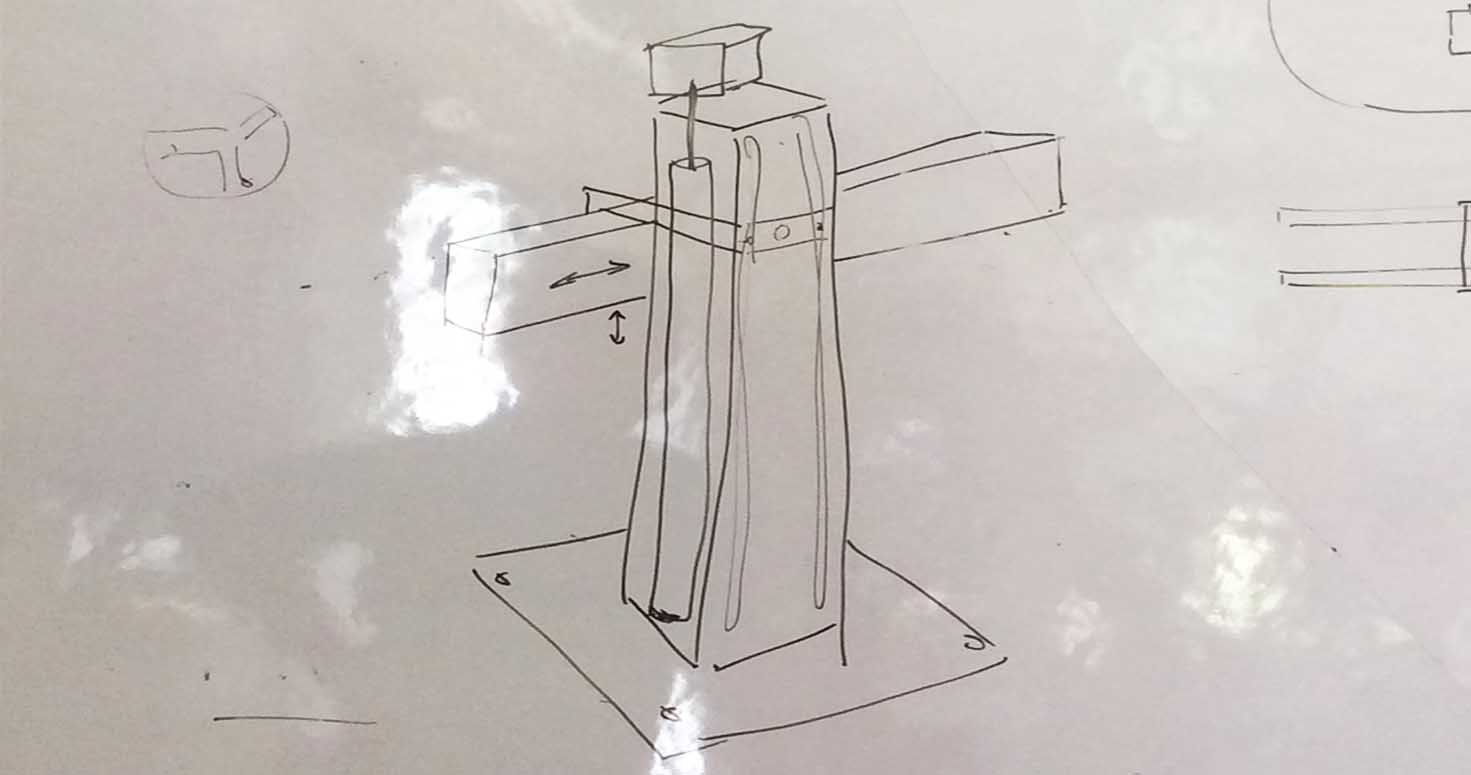
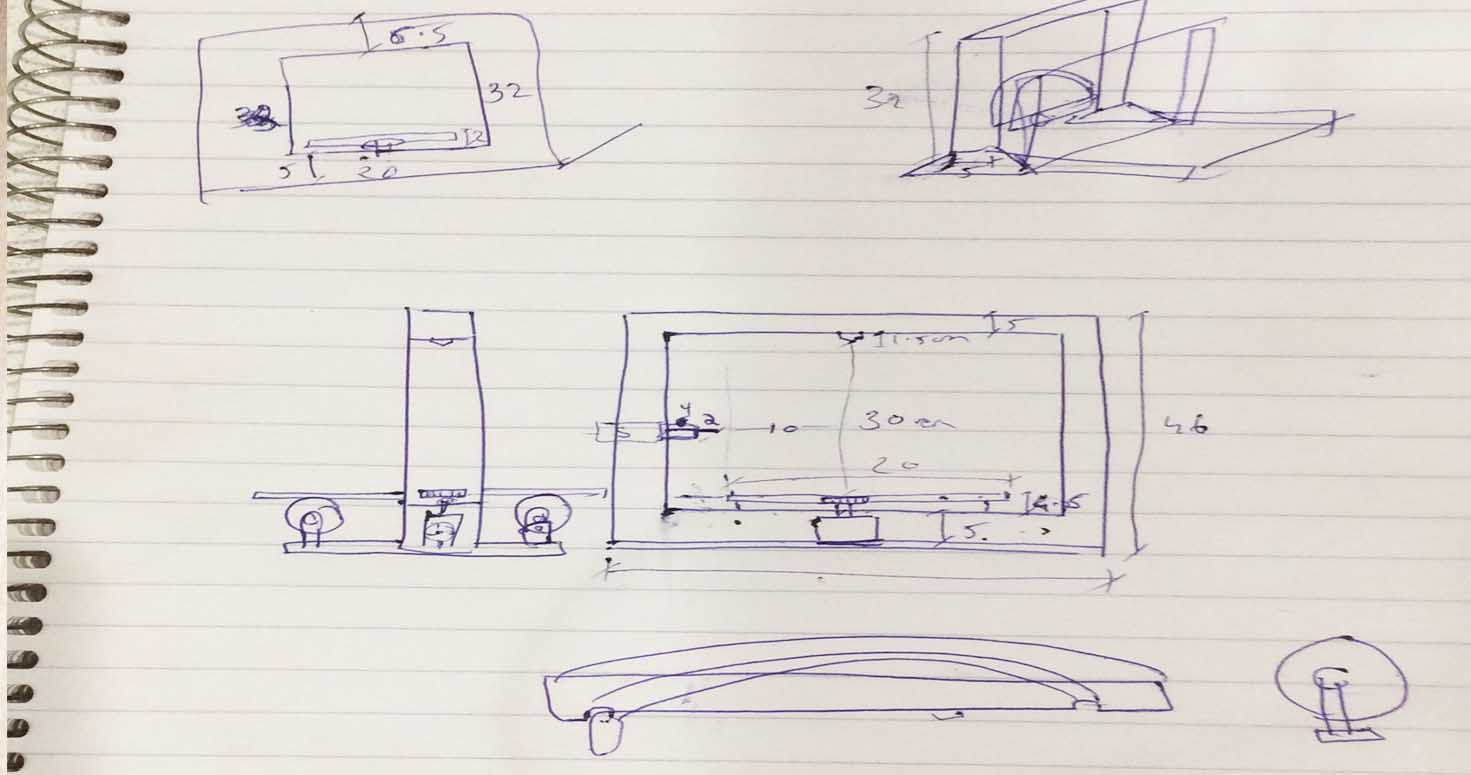
Our Initial Idea:
After this, I made hand sketch with dimensions of the machine.
While all this i was handling all documentation, pictures, videos as well the functionality of design, brainstorming with team about pros and cons of axis.

After sketching, we started making our 3D design, on katia, which was done by Jatin. 3D designing was the only thing which i didnt do but we all made lot of changes to the design when we started hands on.
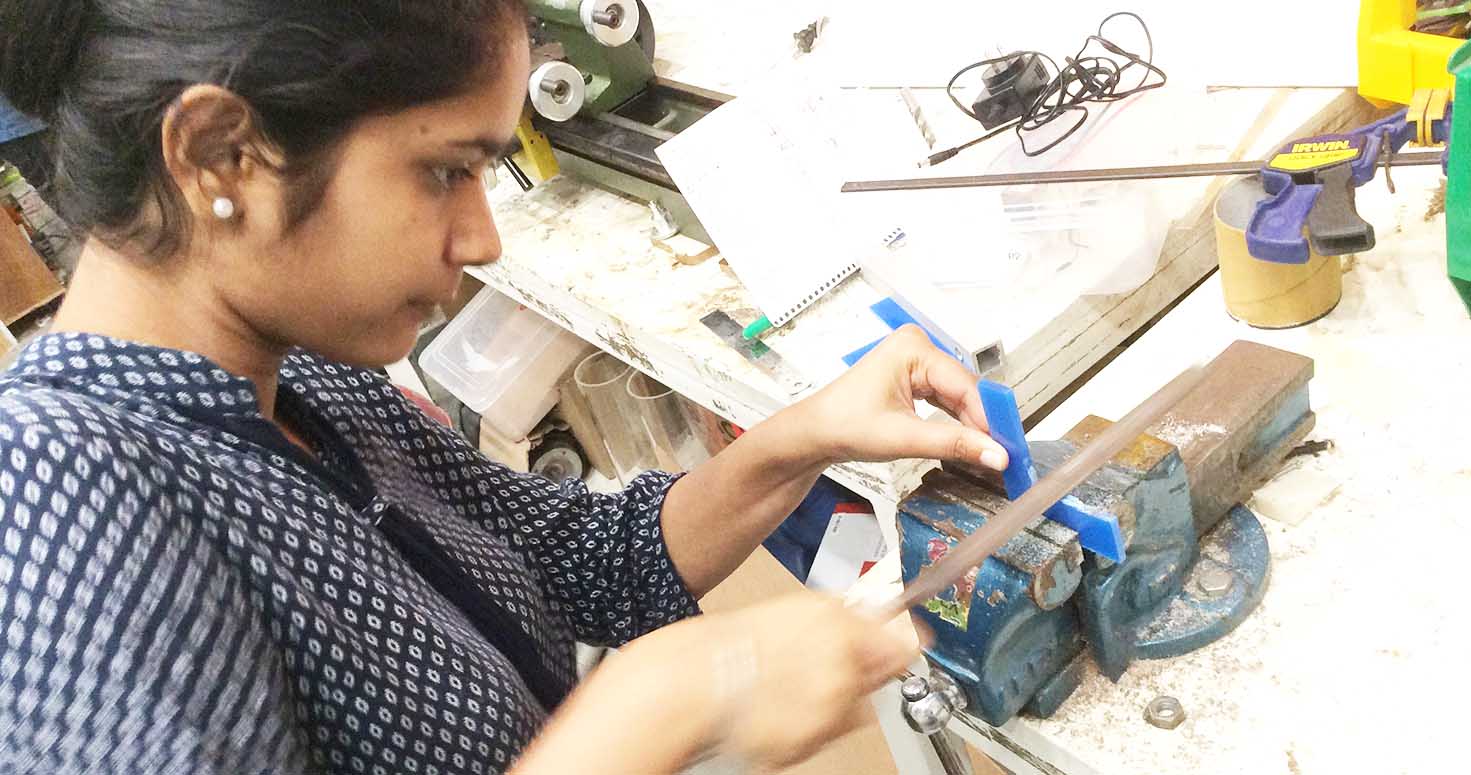
The lab's shopbot and laser cutter was down, so I started making the prototype through scrap parts and by drilling, grinding, bending , cutting , chisling, sanding, filing etc with hands and with machines for now.
It was great experience to understand the need of digital fabrication because in the prototype I was manually setting up the right dimensions after every try to pressfit or to move parts freely etc.
I also tested motors to know their rpm and torque on oscilloscope.



We faced problems like:
1. Frame holes were not well aligned
2. Stabilising the movement to track light
And then we made a frame for our machine.
In the end, I had a prototype in which i worked on X axis, Y axis , 3D design done by Jatin, Motors moving with help of Grassopper on Rhino which was really a good learning experience with mahavir to code and make it run together and then finally i spend my time working on Xbox controller, which is in process for utilisation.
And after Regional review we distributed the weeks and took different tasks where
I chose to take task of assembly, electronics and programming and also gathering pictures, videos for documentation , also after an intense week.