FINAL PROJECT - MANAGEMENT
CONTENTS
Click on any of the links below to see further details about the final project.
- Project management: Checklist of the project's gradual development.
- Concept: General draft of the first conceived idea.
- 2D/3D design: Summary and steps of the design process.
- Electronic production and design: Details, design and production of the main board for the project.
- 3D printing, laser cutting and prototyping: Further details about the production of the robot's parts.
- Embedded, application and interface programming: Networking, motor control and web interface.
- Final project summary: Video demonstration, bill of materials, files of the final robot and general summary.
PROJECT PLAN EVALUATION
The following gantt chart is followed and checkedlisted to finish the project on time.
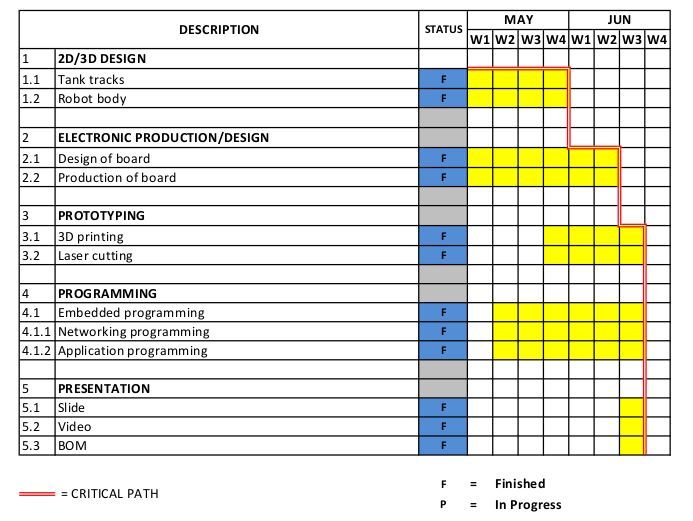
Almost all tasks are to be worked concurrently. Critical path is also outlined in red.
Most importantly is to finish the electronics early and track designs early in order to produce a working prototype.
TIME MANAGEMENT TECHNIQUES
The main time management technique used for the completion of this project is the Pomodoro techique. Find more about the technique here.
I am not a big fan of to-do lists, I believe they are only good to list the tasks to do. I prefer post-its and the android application Trello.
PROGRESS CHECKLIST
- CONCEPT: COMPLETE
- DESIGN: COMPLETE
- STRUCTURE AND MECHANICS: COMPLETE
- ELECTRONICS: COMPLETE
- PROGRAMMING: COMPLETE
- TESTING: COMPLETE
FURTHER QUESTIONS ANSWERED
what is the deadline?
Ideally June 14 of 2017.
what tasks have been completed, and what tasks remain?
Subheading above (i.e. progress checklist) will be updated continuously.
how will I complete the remaining tasks in time?
Hard work, perseverance and flexibility in understanding what objectives are too difficult to attain.
What has worked?
So far the tracks, motors and web control.
What hasn't?
Some early tank track prototypes were not suitable.
What have you learned?
I learned not to get too frustrated when something does not work and to never give up!.