This is a second week assignment of mechanical design and machine
design theme. The first one was the
assignment 9.
I plugged FTDI USB-to-RS485 cable to my Windows 10
computer. Drivers installed yet ready. I checked it from Device
manager and checked it was installed as COM6 in my computer..
Next, I downloaded pygestalt from Github and
unzipped it.
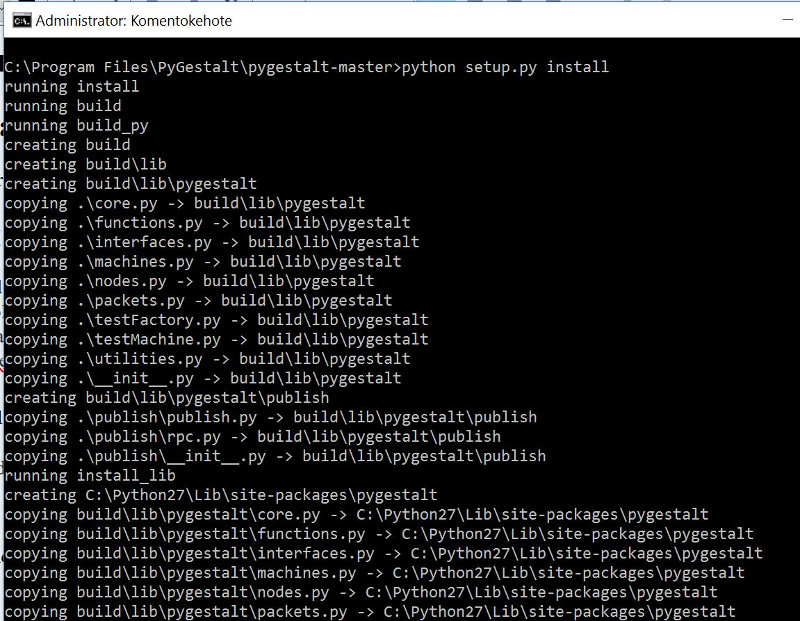
Then, I opened a command window as a administrator in the same
directory I installed the gestalt-master it using command python
setup.py install. I have installed Python 2.7 earlier.
Then, I downloaded pyserial 2.7 from page:
https://pypi.python.org/pypi/pyserial/2.7 and installed it.
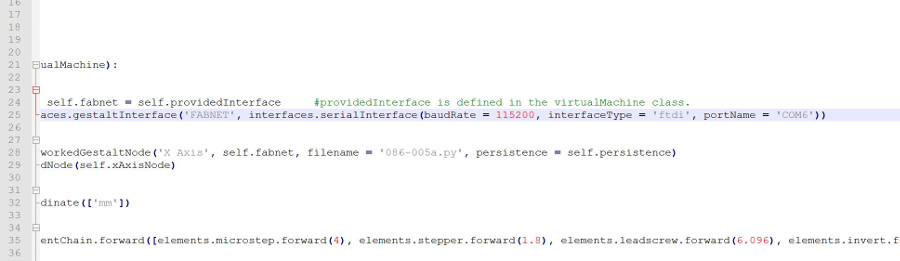
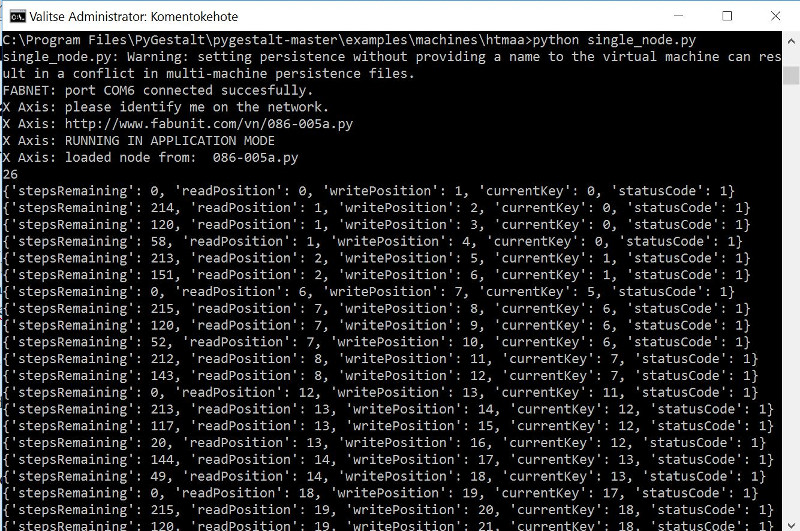
And finally, I was able to drive one stepper motor by
command python single_node.py in command window. Not
yet. At first, I must edit single_node.py file and change portName
to the same as FTDI cable was installed, COM6. It was
in line 25.
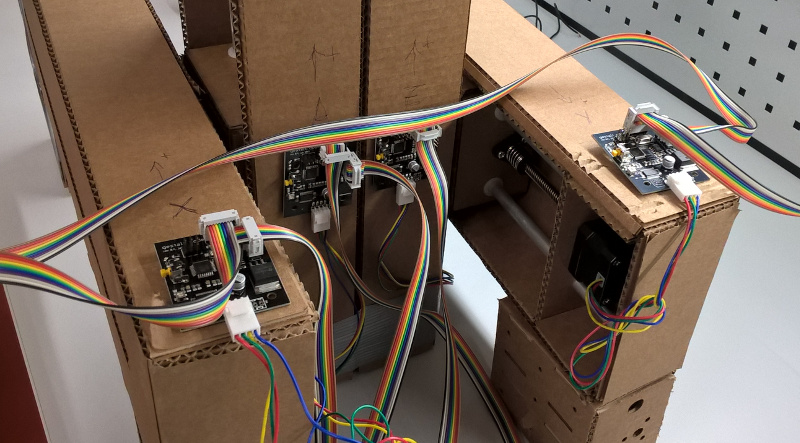
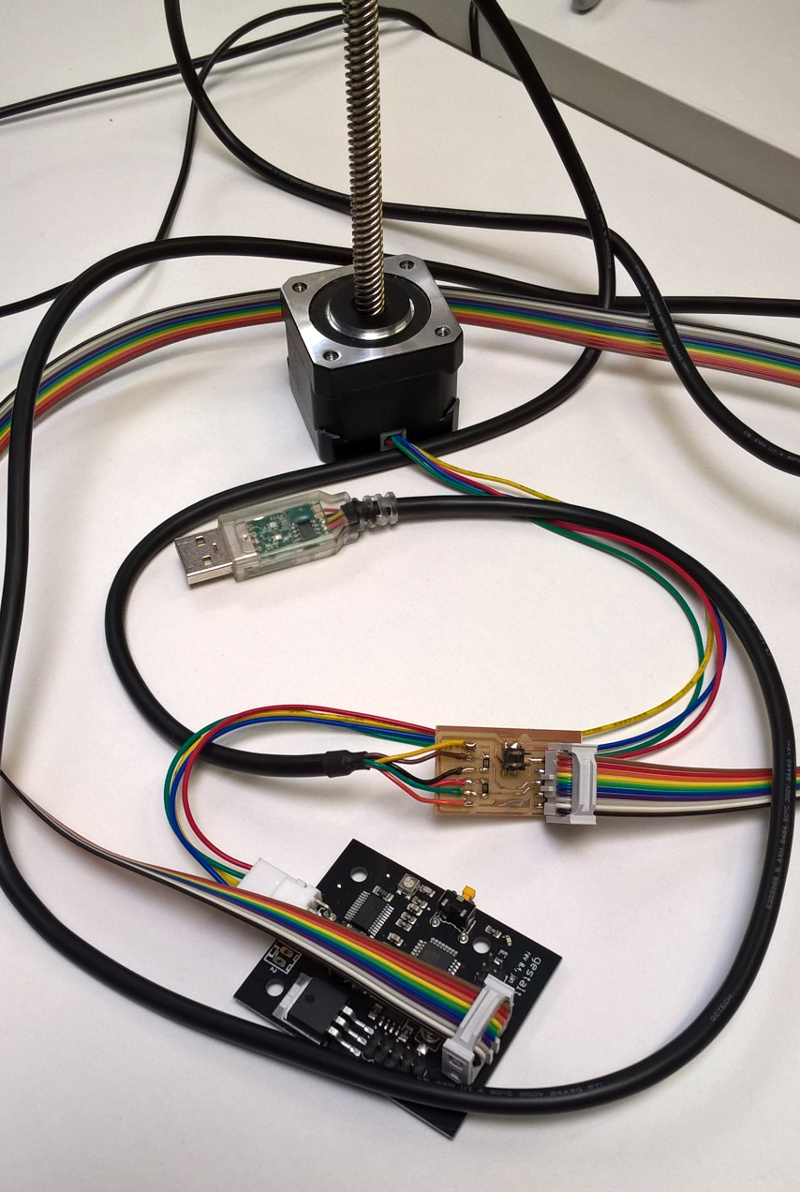
After first test with help of Juha-Pekka it was time to automate our own machine. I made one straight ribbon cable and realized that I cannot use it. We had wrong adapter design. Jari made new one, following as design Baas.
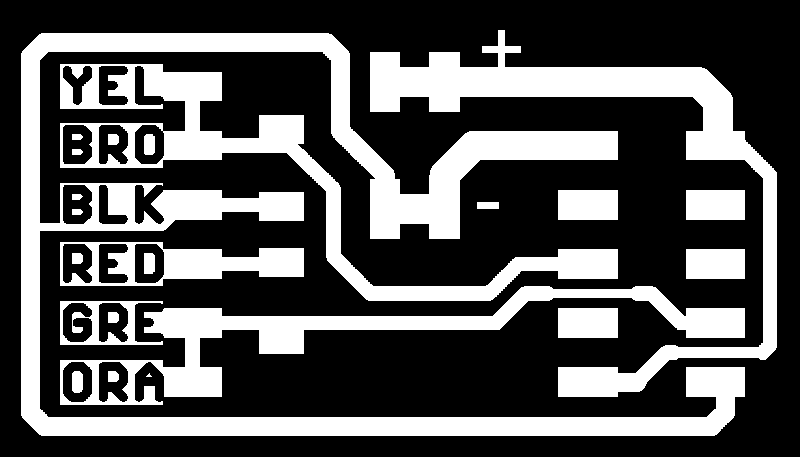
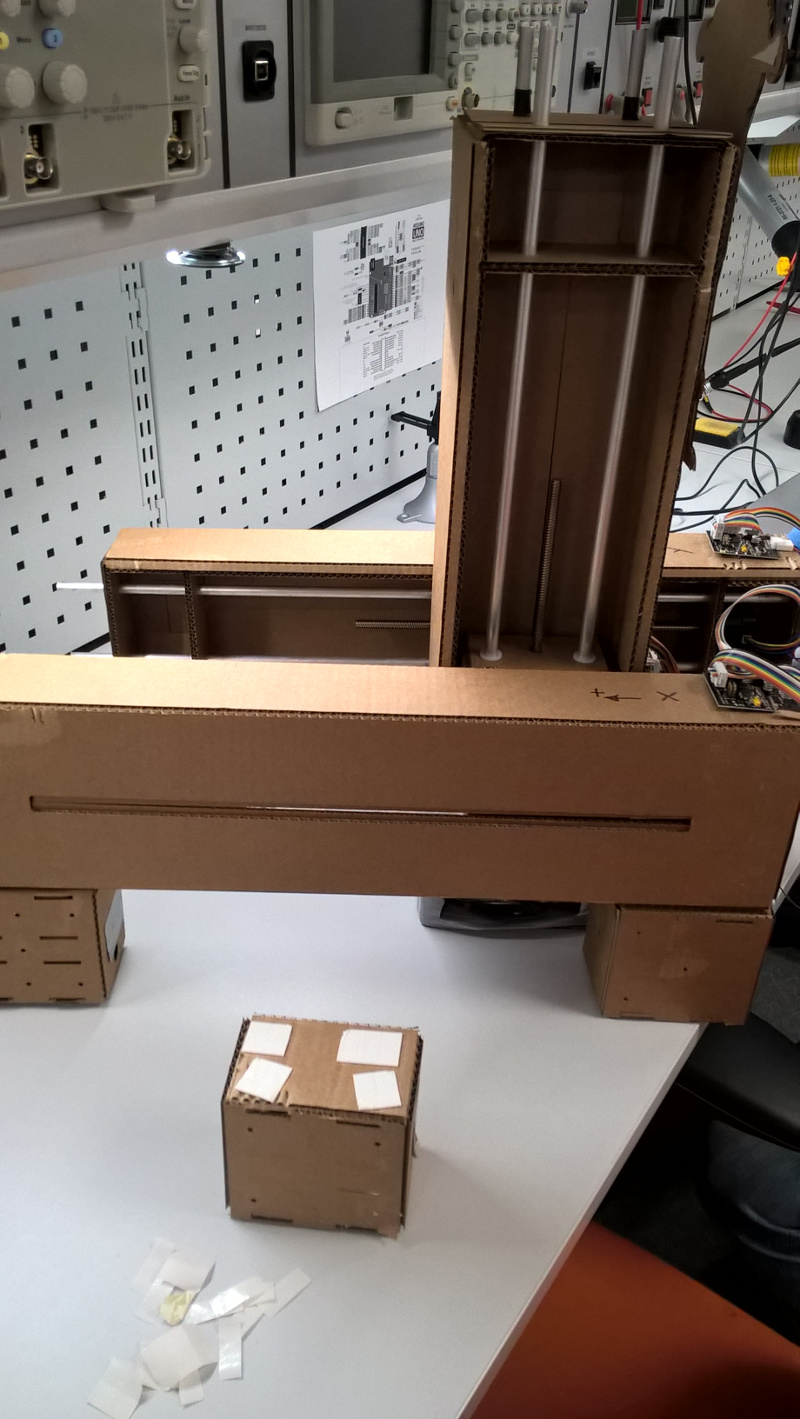
Next building step was correct connections and cable head positions between units. They are presented in the picture. Adapter board needed also external 12 V supply voltage.
We tested the gestalt system again and realized, that I must
delete the old test.vmp file at first and use command window as
administrator (File manager: File > Open command window as
administrator).
I edited Nadya's xyz_test.py file and added fourth axis as
aAxisNode there.
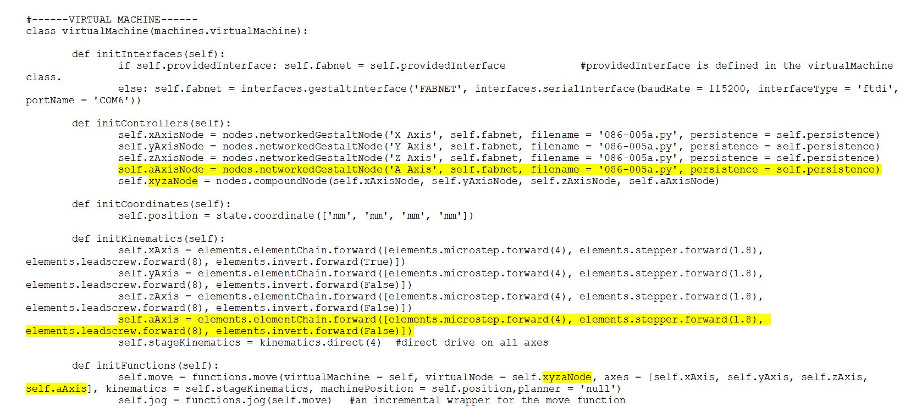
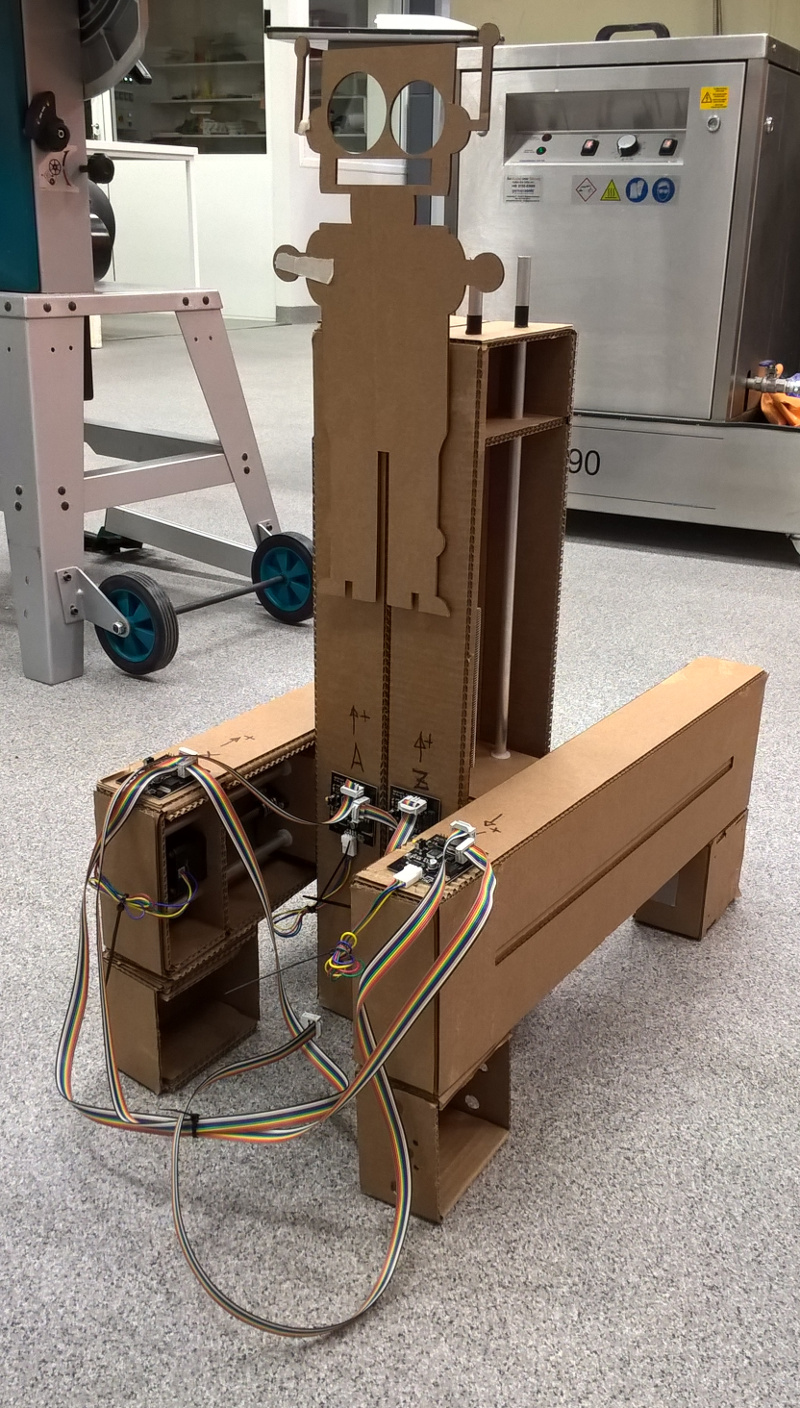
Also some final modifications might be done.
Here node positions, axis poses and orientations might be seen.