 Final Project Presentation
Final Project Presentation



Assignment-1st step
From my Professor (Xavi and Santi) I received some steppers to test and the first step was search the datasheets, also they give me a kit with one Arduino to try to program.
28BYJ-48 – 5V Stepper Motor
Step Motor Driver Board UL2003 4 Phase Module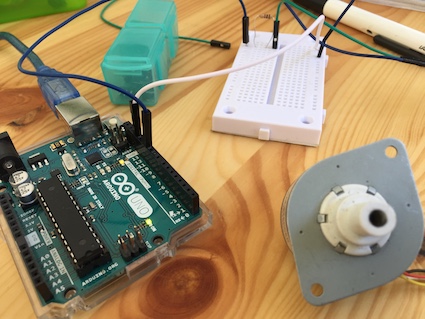
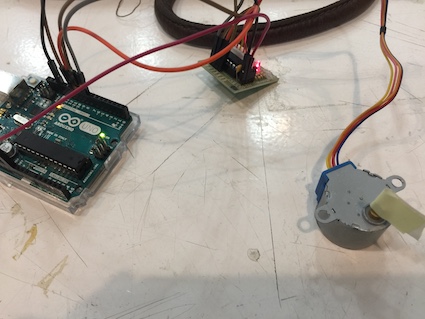
This is a attempt whit a different driver, this is Pololu A4988.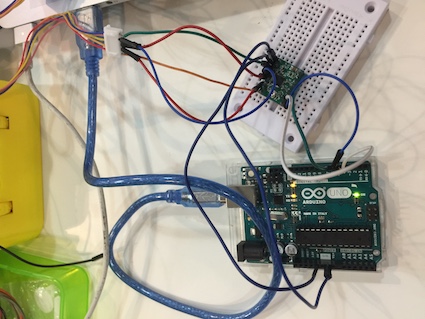
This was the first code that I tryed with A4988 driver but no work.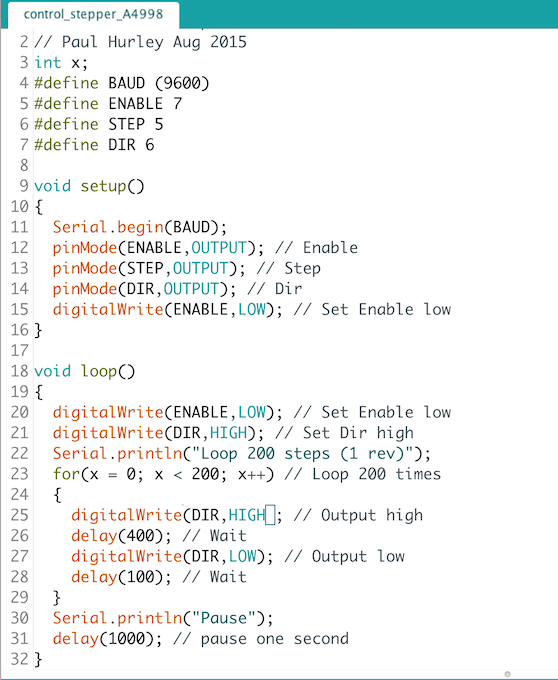
Conclusions:
In This attempt I learned the difference between the UNIPOLAR STEPPERS and BIPOLAR STEPPERS, I`m trying with 2 different kinds of them.
Unipolar28NYJ-48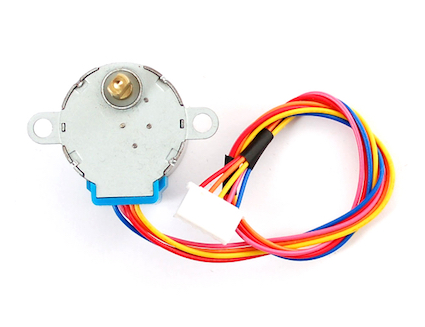
BipolarLDO35BYZ-B01-12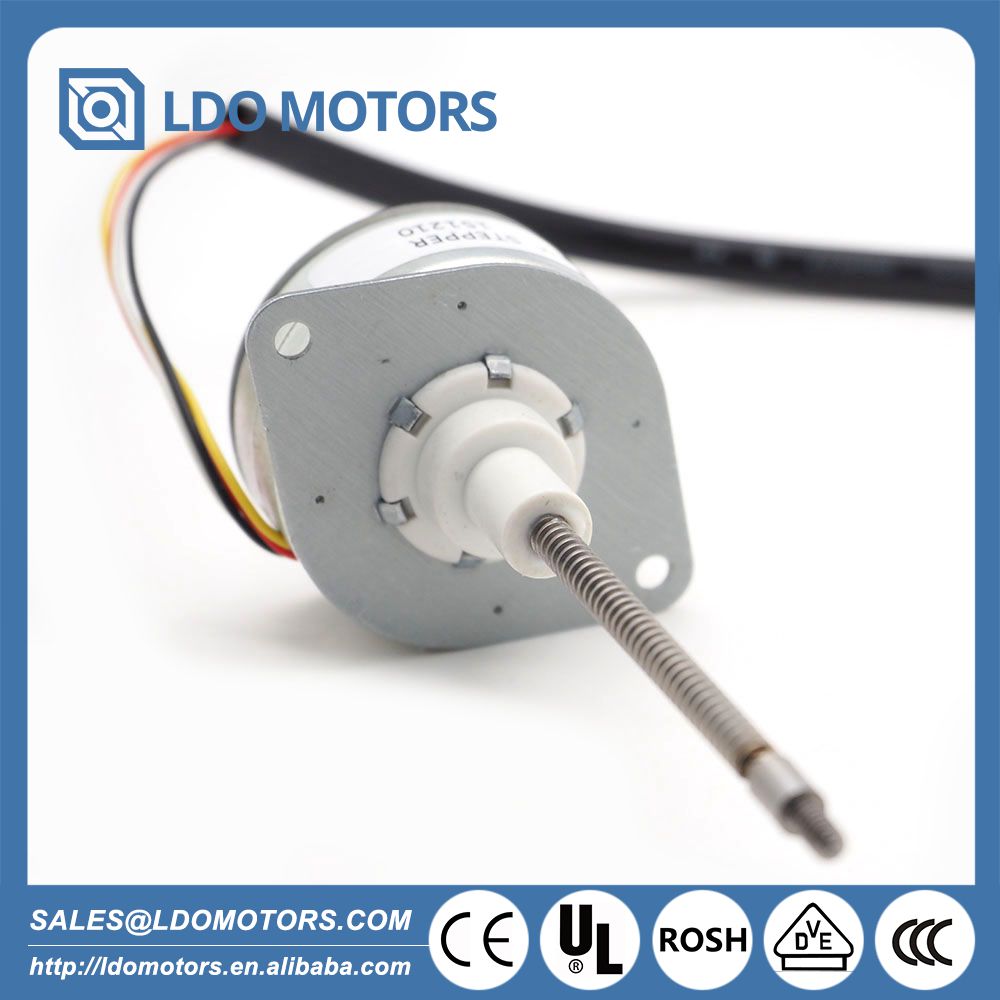
Step Motor Driver Board UL2003 4 Phase Module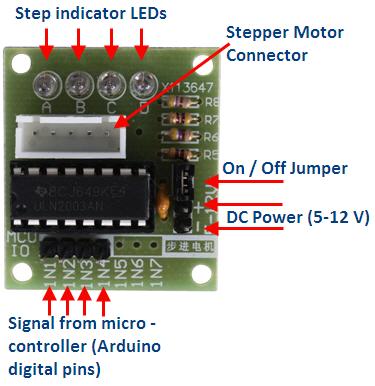
PololuA4988.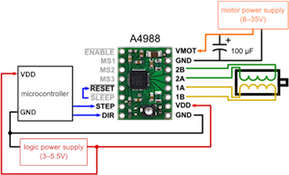
The 1st time with the UL2003 the stepper worked nice, it was so cool to be true and actually in the next ones ones nothing works good. The thing was that this steppers drivers (A4988) are to bipolar steppers, and the 28NYJ-48 is a unipolar stepper.So when I changed to LDO35BYZ-B01-12 I thought that everything would change but NO!
Here is the explaneation
This is the sketch that I used to try whith These components.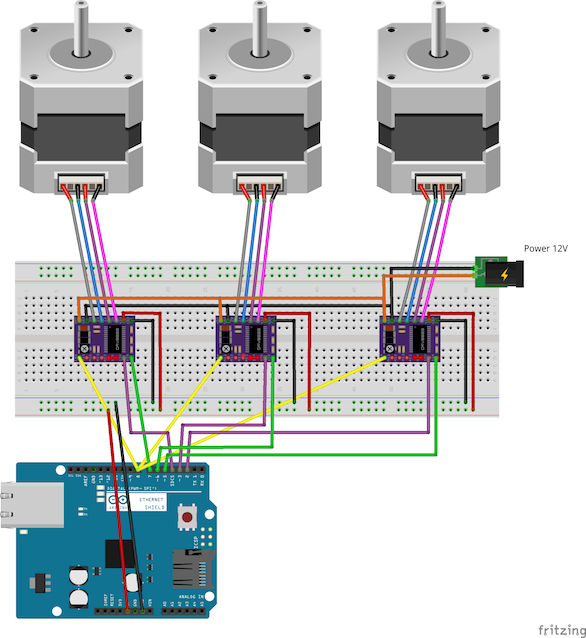
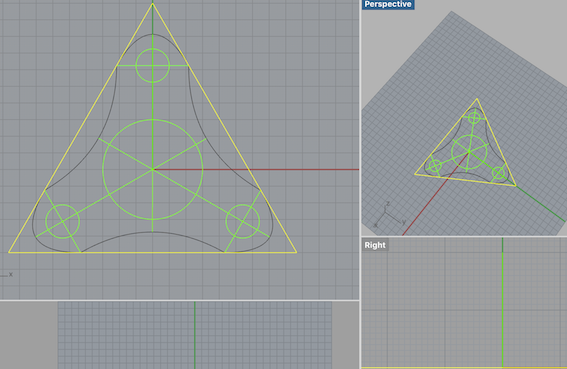
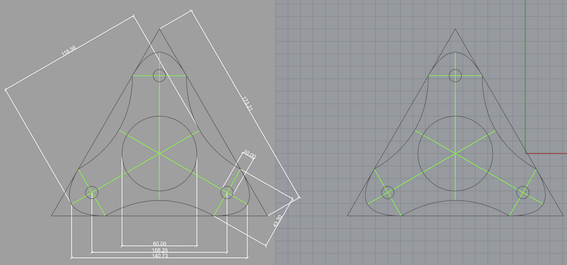
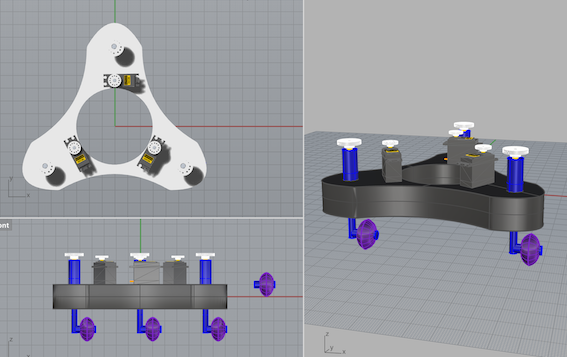
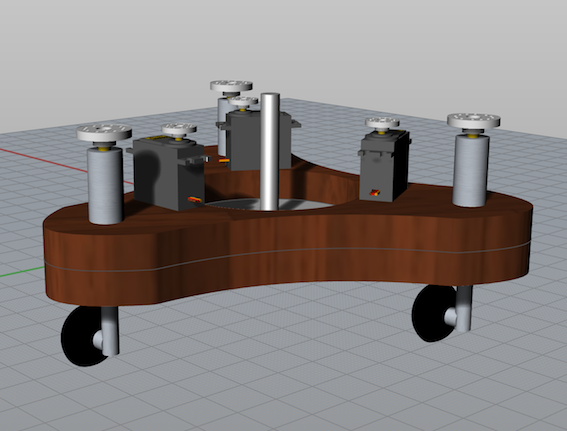
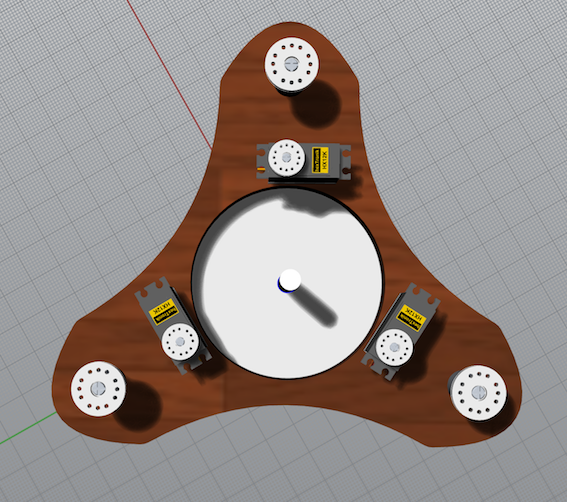
I decided to change the steppers (SM-S4303R) and I was trying with this new ones components, without driver and I thought start with the electronic design.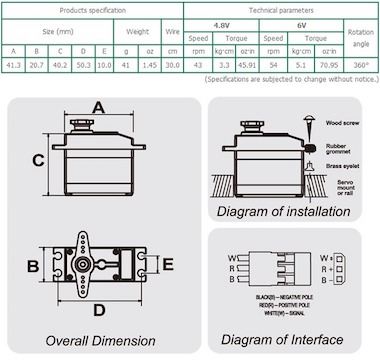
Here is the code that I used to program
this attempt.
#include
Servo myservo;
int vel = 705;
void setup() {
myservo.attach(10);
digital 9
}
void loop() {
//servo parado (equivalente a angulo 90º)
vel = 720;
myservo.write(vel);
delay(1500);
}