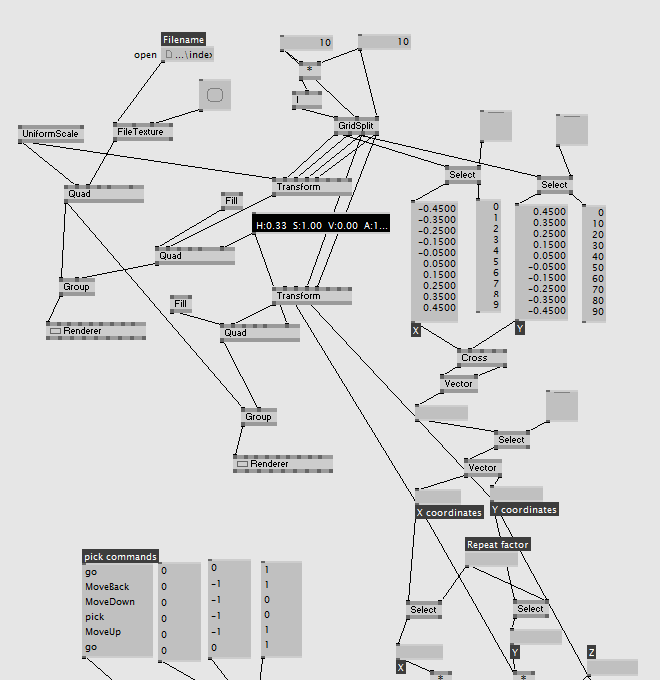
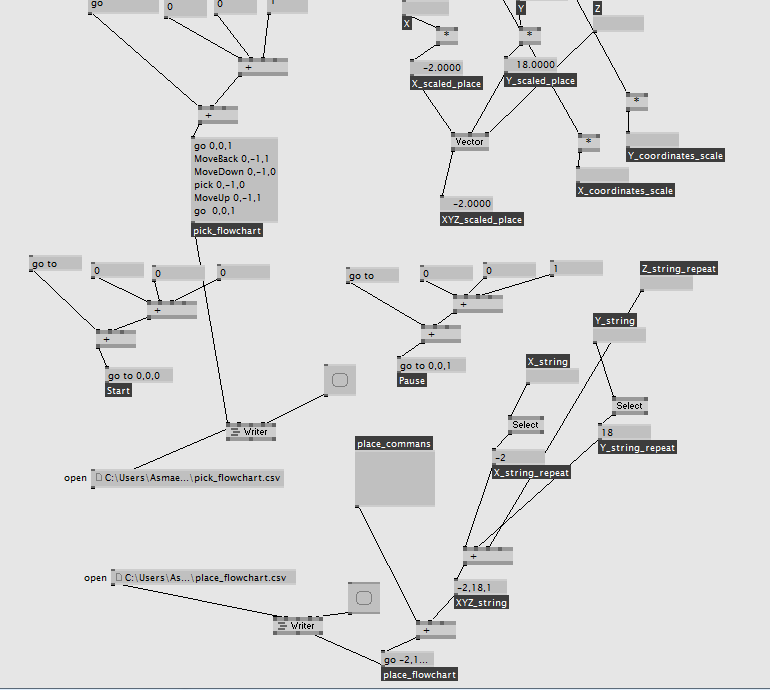
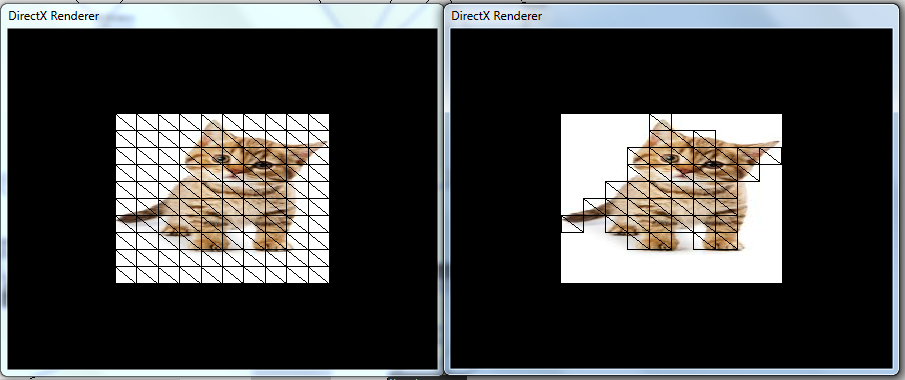
 in the last picture are the pieces/tiles to place, layout and machne design is the same as opendot group. here I present machine behavior four flowcharts, start, pick flowhart, place flochart, pause flowchart, it is an XY axis machine, servo motor used to move the suction up and down in order to have it in the right position on the top of one tile and dc motor is used to do vacuum which is pick and place operands, servo motor and DC motor are attached to sashakit board according to design below the program is developped in arduino IDE, pick and place machine program is built in python language and gestalt hardware modules, please find below the explainations and screeshots.
in the last picture are the pieces/tiles to place, layout and machne design is the same as opendot group. here I present machine behavior four flowcharts, start, pick flowhart, place flochart, pause flowchart, it is an XY axis machine, servo motor used to move the suction up and down in order to have it in the right position on the top of one tile and dc motor is used to do vacuum which is pick and place operands, servo motor and DC motor are attached to sashakit board according to design below the program is developped in arduino IDE, pick and place machine program is built in python language and gestalt hardware modules, please find below the explainations and screeshots.