11. Input devices
In the week6 Electronics production, I made a board which could be attached multiple different sensor and actuator. Therefore, in this week, I try to make a sensor board which could be connected with my board.
First, I downloaded temperature example file.
This example is attiny45, however my board uses attiny44. Thus, I redesigned a board and program file for attiny44.
{kind=link}
11-1. Designing temperature sensor board
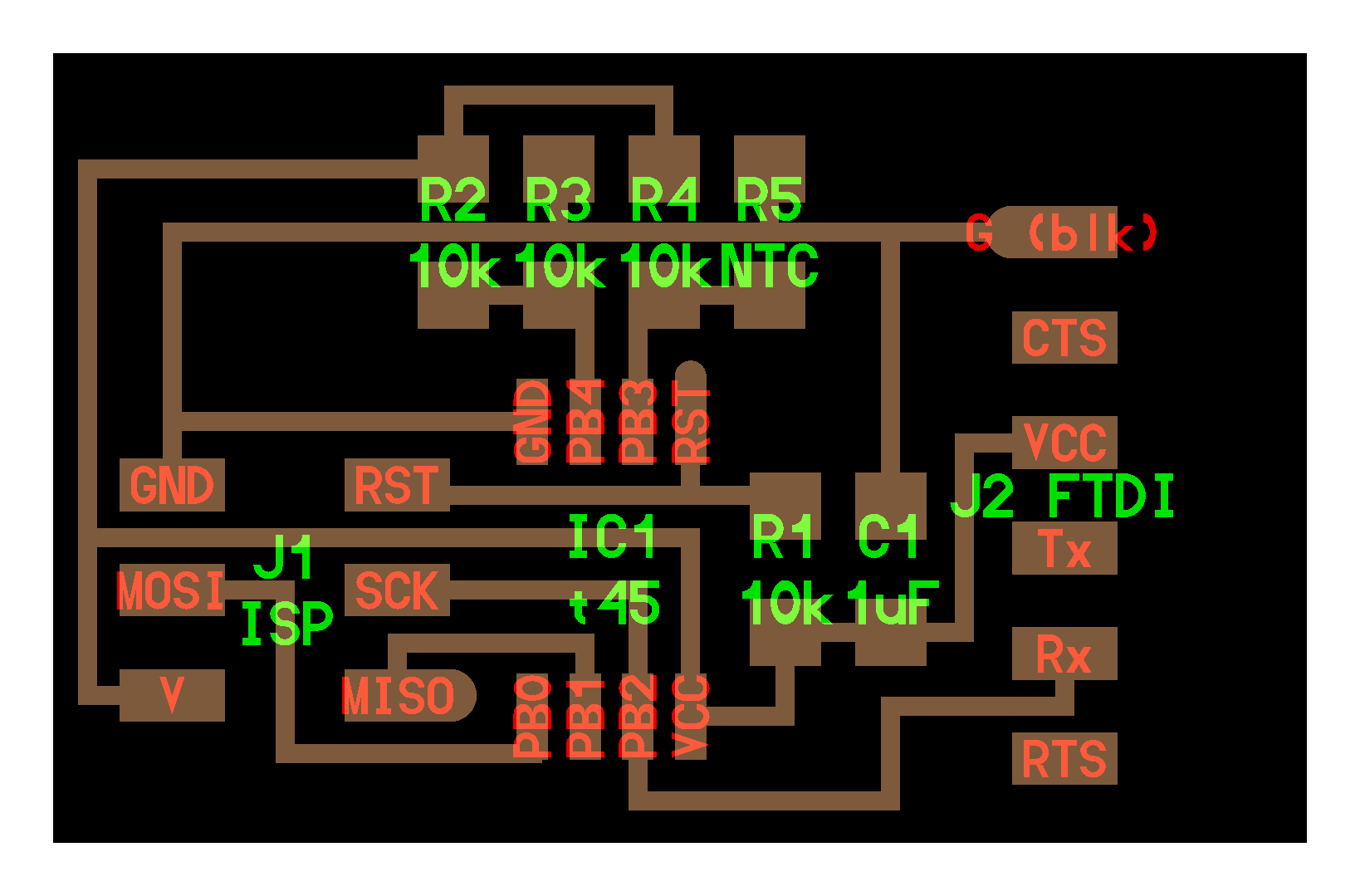
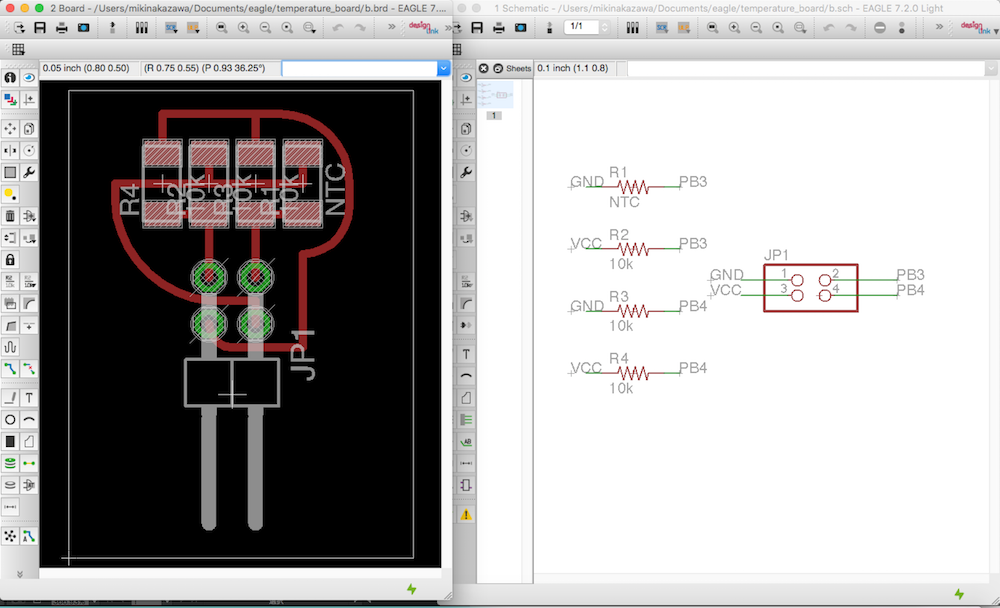
I redesign the board refering to example. I added some electronics parts from eagles library.
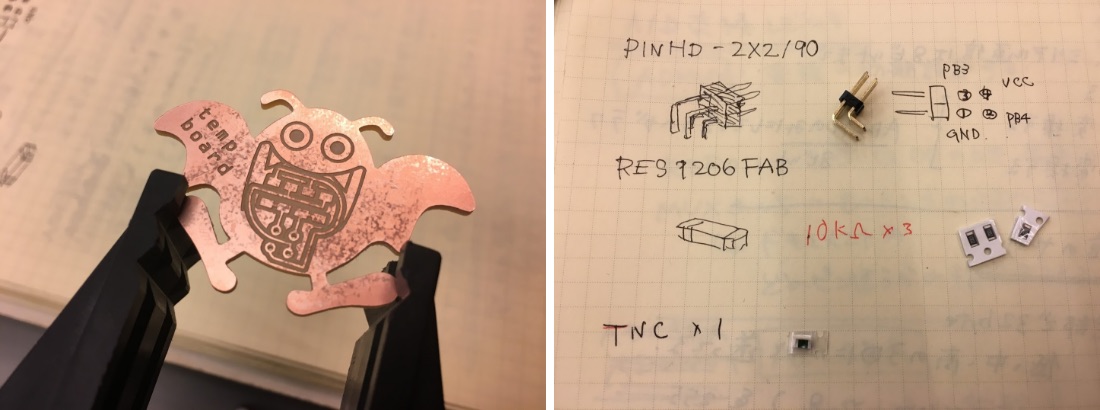
PARTS : PINHD 2×2/90 and RES1206FAB×4(10k ×3 and TNC)
And I connected each parts with wires and exported png file.
 Download : temp.brd・temp.sch
Download : temp.brd・temp.schNext I imported the png in Adobe illustrator.(because I want to make board “Drakee” which is a monster of japanese famous game DRAGON QUEST. )
I designed drakee outline and assembled circuit and it. I exported three png files : outline, traces, holes.
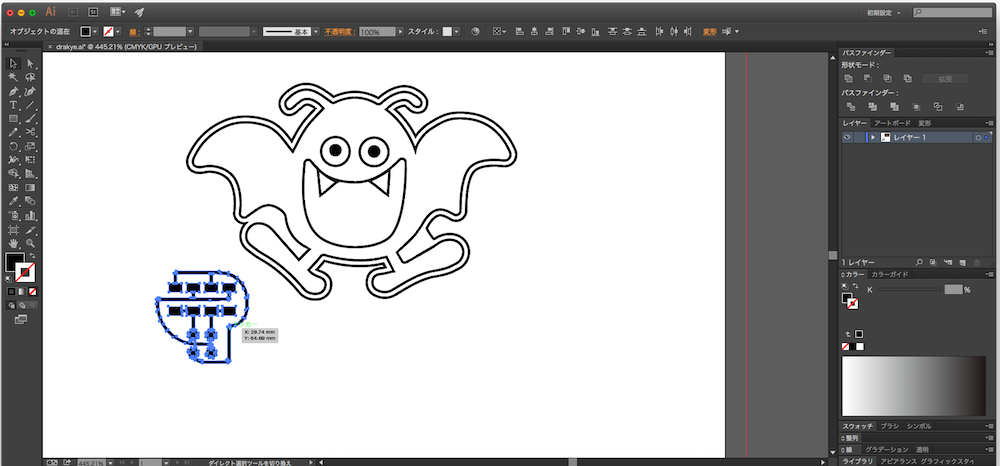
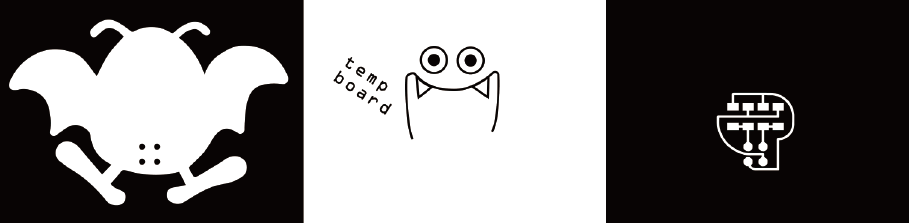 Download : outline.png・traces.png・text_offset-1.png
Download : outline.png・traces.png・text_offset-1.png
{kind=link}
{kind=link}
{kind=link}
11-2. Making PCB board
After making g-code files with fabmodules, I milled the board. I used the machine kitmill cip100 which is for making circuit only. Next Soldering board.
While soldering, I noticed that I had a mistake.
2*2 pinheader holes is too small. Thus, I drilled more bigger holes with drilling machine.

11-3. writing temperature sensoring program
Refering to example temp board, I wrote program like below.
#include
#include
#define output(directions,pin) (directions |= pin)
// set port direction for output
#define set(port,pin) (port |= pin)
// set port pin
#define clear(port,pin) (port &= (~pin))
// clear port pin
#define pin_test(pins,pin) (pins & pin)
// test for port pin
#define bit_test(byte,bit) (byte & (1 << bit)) // test for bit set
#define bit_delay_time 102
// bit delay for 9600 with overhead
#define bit_delay() _delay_us(bit_delay_time)
// RS232 bit delay
#define half_bit_delay() _delay_us(bit_delay_time/2)
// RS232 half bit delay
#define char_delay() _delay_ms(10)
// char delay
#define serial_port PORTA
#define serial_direction DDRA
#define serial_pin_out (1 << PA1) //// シリアル送信ピンRX
void put_char(volatile unsigned char *port, unsigned char pin, char txchar) {
clear(*port,pin);
bit_delay();
if bit_test(txchar,0)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,1)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,2)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,3)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,4)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,5)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,6)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,7)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
set(*port,pin);
bit_delay();
bit_delay();
}
int main(void) {
static char chr;
CLKPR = (1 << CLKPCE);
CLKPR = (0 << CLKPS3) | (0 << CLKPS2) | (0 << CLKPS1) | (0 << CLKPS0);
set(serial_port, serial_pin_out);
output(serial_direction, serial_pin_out);
ADMUX = (0 << REFS1) | (0 << REFS0) // attiny44はrefs1,refs0のみ
//| (0 << ADLAR) // right adjust
| (0 << MUX5) | (1 << MUX4)| (0 << MUX3) | (0 << MUX2) | (0 << MUX1) | (1 << MUX0);
// 20(PA2-PA3) A/d変換の表をみて記入する。センシングするピン指定をここで行う
ADCSRA = (1 << ADEN) // 1が動作許可
| (1 << ADPS2) | (1 << ADPS1) | (1 << ADPS0); // 分周比CK/128 = 111
ADCSRB = (1 << BIN); // bipolar mode
while (1) {
put_char(&serial_port, serial_pin_out, 1);
char_delay();
put_char(&serial_port, serial_pin_out, 2);
char_delay();
put_char(&serial_port, serial_pin_out, 3);
char_delay();
put_char(&serial_port, serial_pin_out, 4);
char_delay();
ADCSRA |= (1 << ADSC);
while (ADCSRA & (1 << ADSC))
;
chr = ADCL;
put_char(&serial_port, serial_pin_out, chr);
char_delay();
chr = ADCH;
put_char(&serial_port, serial_pin_out, chr);
char_delay();
}
}
During make program, I had some trobles. I noticed that Data sheet is very important !!!
in the setting MDMUX,
・ Attiny 45 has REFS 0-2 , but Attiny44 has REFS 0-1 only. I should delete “0 << REFS2”.
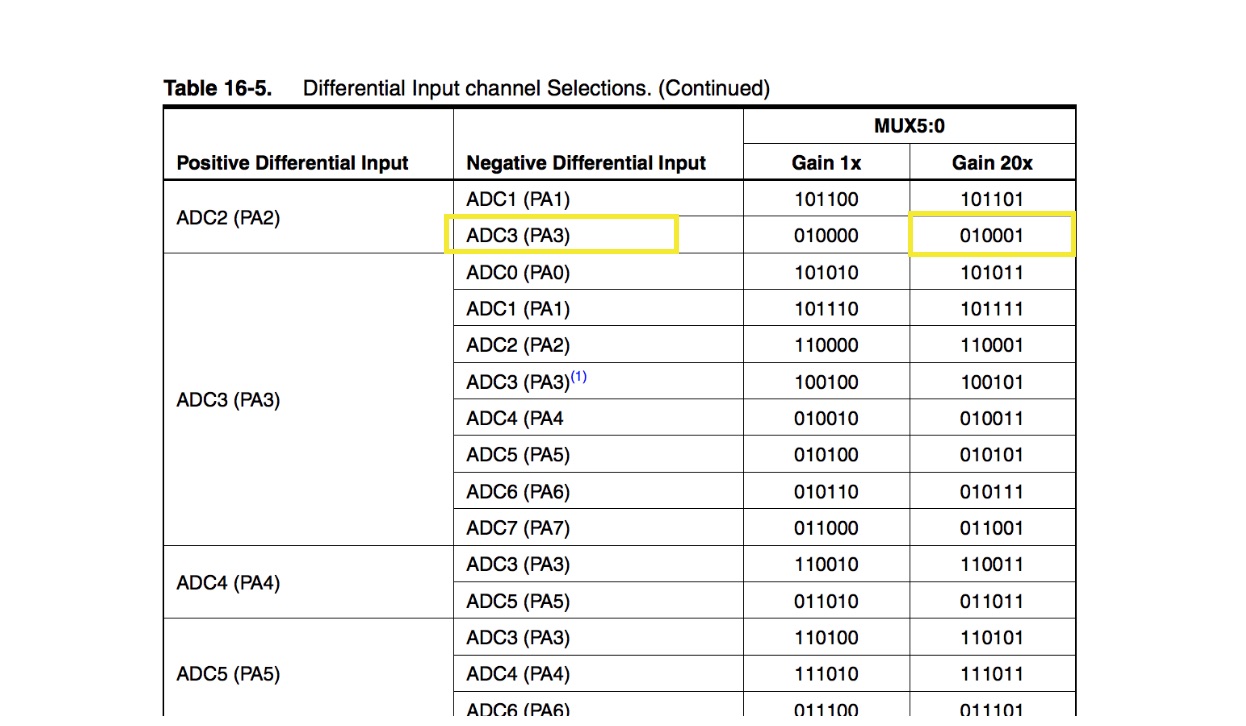
・My board uses pin PA3 and PA2 as sensor input. Example board uses pin PB3 and PB4.
I changed line 119, MUX5~0. Refer to datasheet, [ (PA2-PA3)×20] is [ MUX5~0:010001] .
11-5. Writing a program in Drakee board
I connected each boards like this.
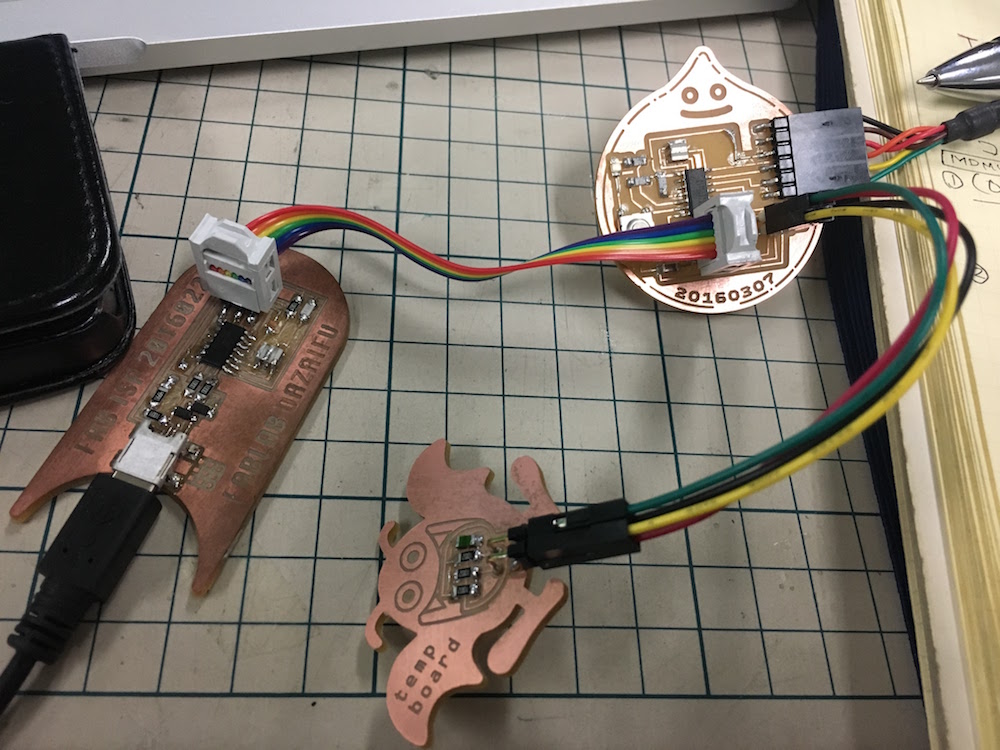
PC -- [usb cable] -- FAB ISP -- [2×3 ribbon cable] -- Slyme attiny44 board
[[slyme attiny44 board]] -- [2×2 ribbon cable] -- Drakee board(Sensor board)
[[slyme attiny44 board]] -- [FTDI cable] -- PC
I wrote make file like below.
PROJECT=temp
SOURCES=$(PROJECT).c
MMCU=attiny44
F_CPU = 20000000
CFLAGS=-mmcu=$(MMCU) -Wall -Os -DF_CPU=$(F_CPU)
$(PROJECT).hex: $(PROJECT).out
avr-objcopy -O ihex $(PROJECT).out $(PROJECT).c.hex;\
avr-size --mcu=$(MMCU) --format=avr $(PROJECT).out
$(PROJECT).out: $(SOURCES)
avr-gcc $(CFLAGS) -I./ -o $(PROJECT).out $(SOURCES)
program-bsd: $(PROJECT).hex
avrdude -p t44 -c bsd -U flash:w:$(PROJECT).c.hex
program-dasa: $(PROJECT).hex
avrdude -p t44 -P /dev/ttyUSB0 -c dasa -U flash:w:$(PROJECT).c.hex
program-avrisp2: $(PROJECT).hex
avrdude -p t44 -P usb -c avrisp2 -U flash:w:$(PROJECT).c.hex
program-usbtiny: $(PROJECT).hex
avrdude -p t44 -P usb -c usbtiny -U flash:w:$(PROJECT).c.hex
program-dragon: $(PROJECT).hex
avrdude -p t44 -P usb -c dragon_isp -U flash:w:$(PROJECT).c.hex
and typed below command in terminal.
cd ~/Desktop/program/temp
make -f temp.make
sudo make -f temp.make program-usbtiny //writing program
python temp.py /dev/tty.usbserial-FTGO00D8 // open serial monitor
Result.