INPUT DEVICES
This week is all about sensors.
Task assigned
This week we have to interface/add a sensor and reading input from it.
A sensor is a device which detects or measures a physical property and records, indicates or otherwise responds to it. This week I decided to work over Sonar sensor to measure the distance from it.
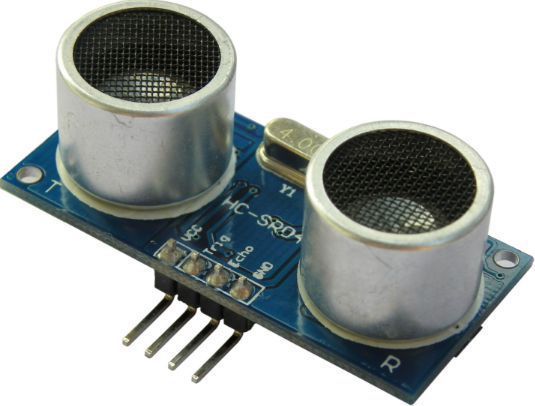
What is sonar sensor
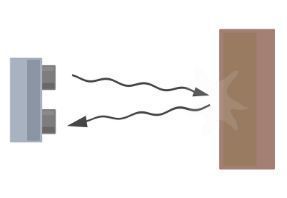
Sonar sensor is an ultrasonic sensor, it is a device that can measure the distance to an object by using sound waves. It measures deistance by sending out a sound wave at a specific frequency and listening for that sound wave to bounce back.
By recording the elapsed time between the sound wave being generated and the sound wave bouncing back, it is possible to calculate the distance between the sonr sensor and the object.
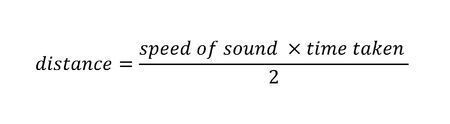
Since it is known that sound travels through air at about 344 meter/second, if we can take the time for the sound wave to return and multiply it by 344 meters to find the total round trip distance of the sound wave. Here the round trip means that the sound wave traveled 2 times the distance to the object before it was detected by the sensor, it includes the
Now its time to develop the board to interface the sonar sensor for that I took Neil's board and re arranged that a little.
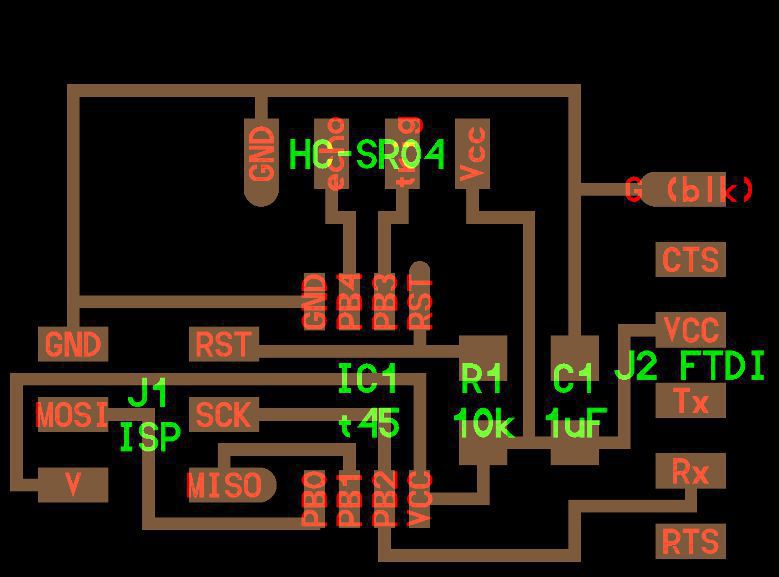
In this week's assignment I switched to ATtiny 45 micro controller which is Atmel 8-bit AVR microcontroller with 4-kilo bytes in-system programmable flash, at first I read carefully the data sheet of this micro controller, you can access the data sheet here
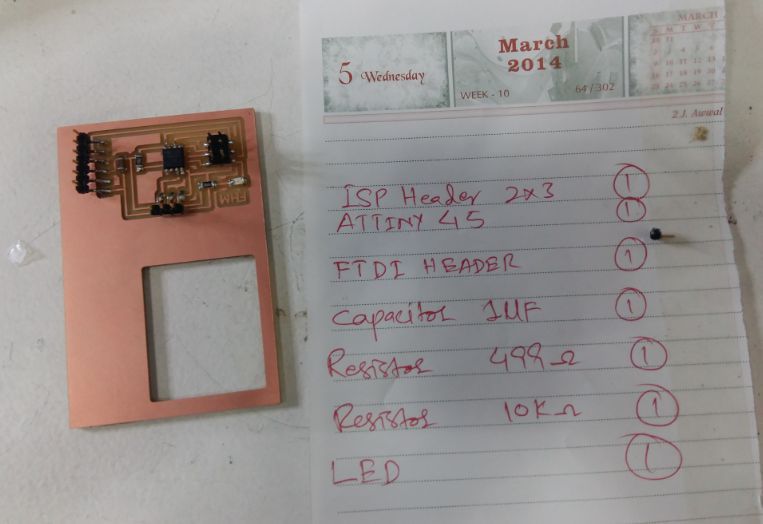
Components required
- AT tiny 45 Microcontroller
- HC-SR04 Sonar sensor
- FTDI Header
- R1 Resistor 10 kilo ohms
- R2 Resistor 499 ohms
- LED
- ISP Header 2 by 3
- C1 Capacitor 1 Micro Farad
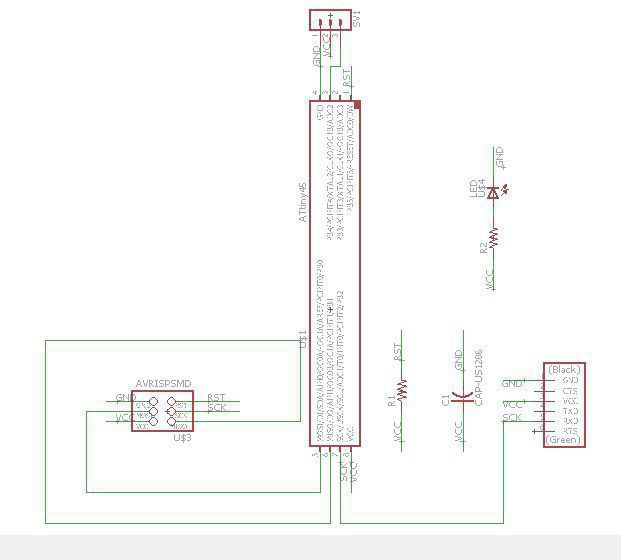
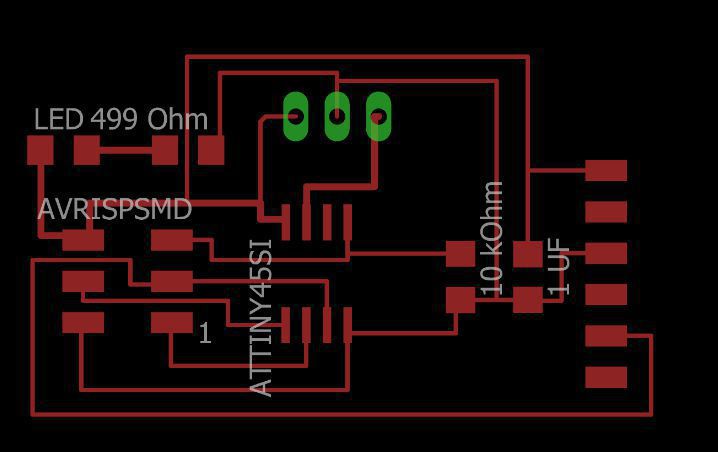
Developing the board using Eagle
Schematic diagram
Board
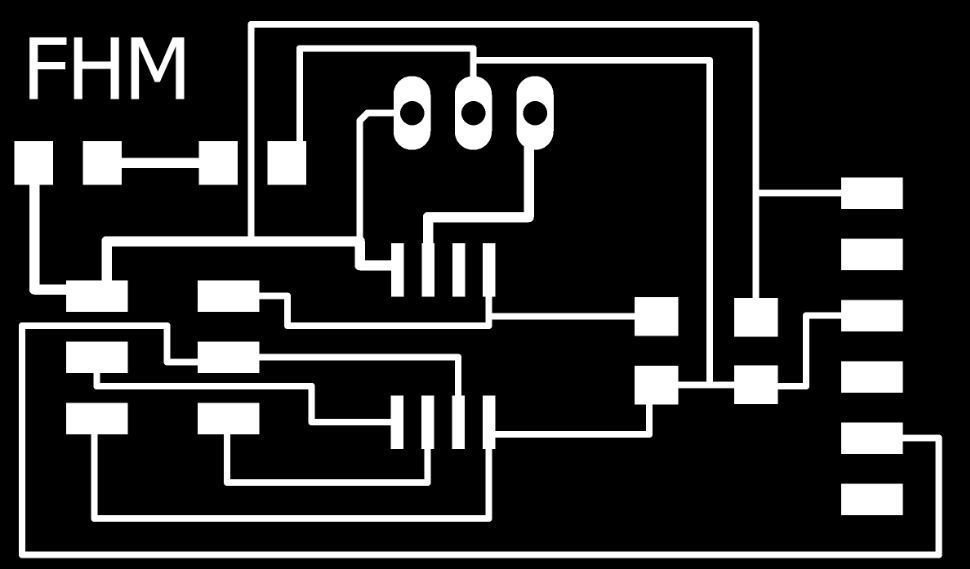
Traces
Outlines

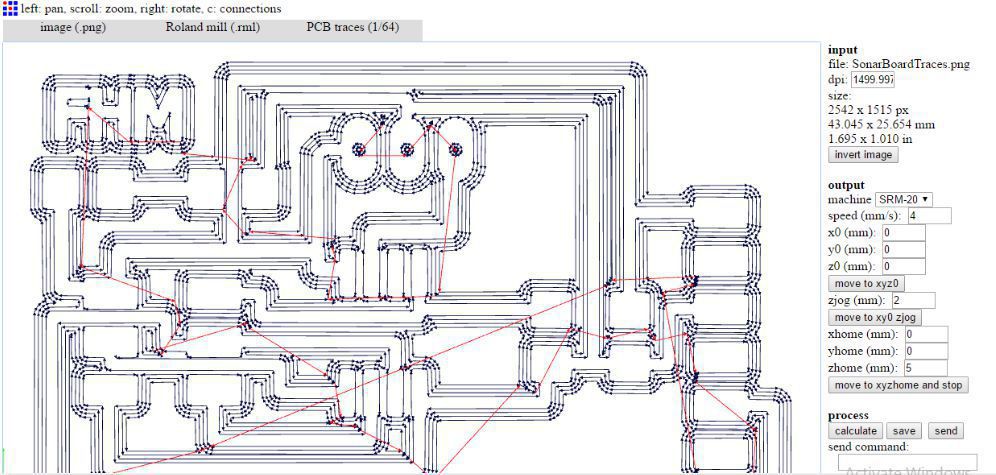
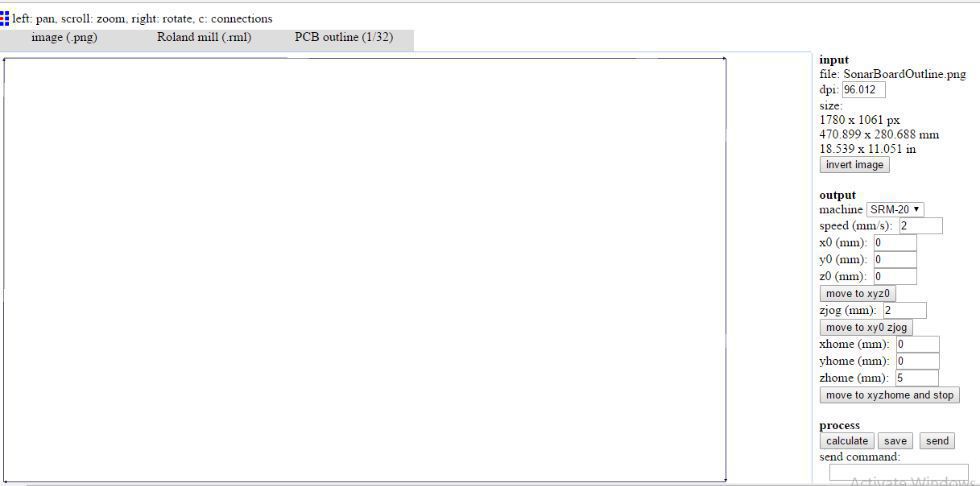
Creating .rml files for traces and outlines
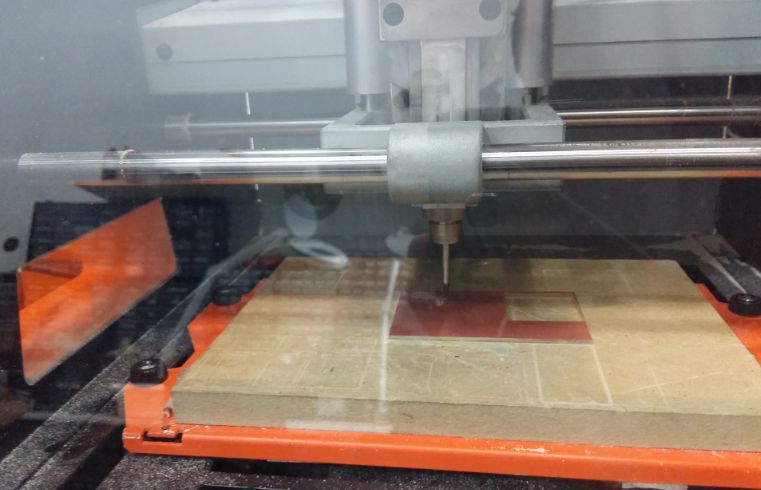
Milling
Populating the board
Burning bootloader Stepwise
Selecting Board
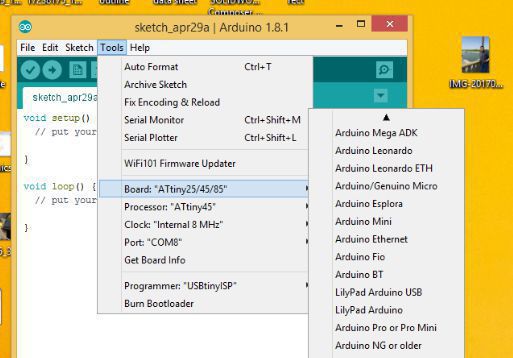
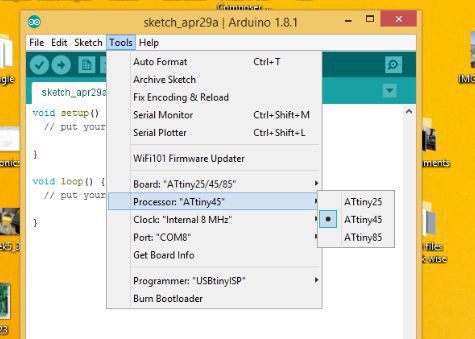
Selecting Processor
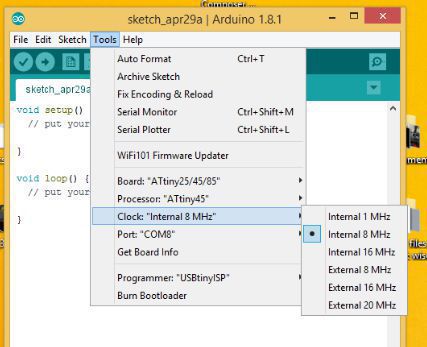
Selecting Internal clock for processor
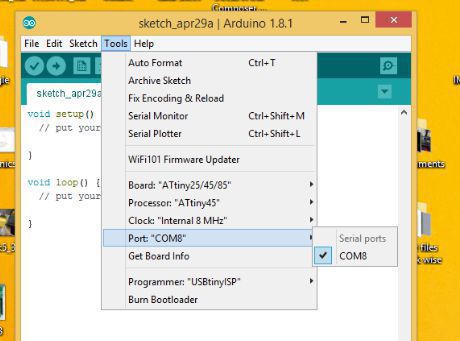
Port detection
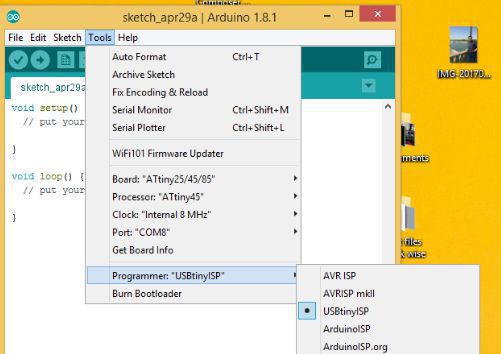
Selecting programmer
Compiling
Done burning bootloader
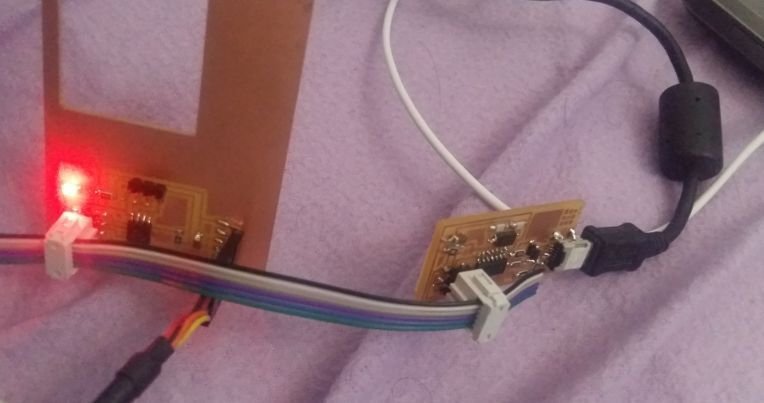
Following snap is showing that my board is UP
Interfacing the Sonar sensor with the board
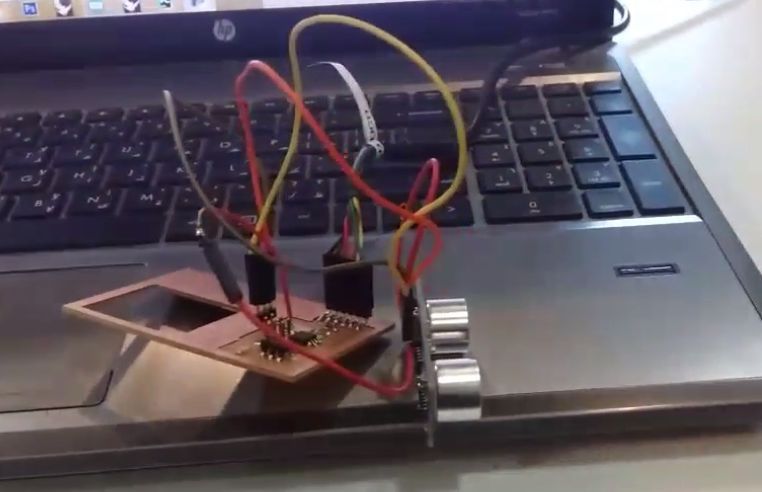
Finally its time to play with the sonar as all the set up was ready. Next I upload the code given by Neil to my board. In this assignment it was necessary to show the python interface rather than IDE, Therefore I was have Python 3.6 installed in my laptop. As I run the code in python I got following expected results i.e my sonar sensor was reading the distance input through my hand motion and was successfully showing the motion effect on screen of my laptop as shown in figures below.
Video Demonstration of this week's task
Download useful files Here