Output Devices
During this week I decided to continue the work on the final project.
As I described during the exercise in the [WEEK11], my machine will have a reactive surface to the proximity of the hands, so I decided to use servo motors to get the motion of it.
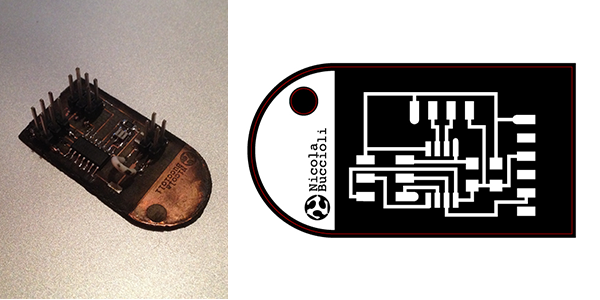

![[hello.servo.44.cad]](http://academy.cba.mit.edu/classes/output_devices/servo/hello.servo.44.png){kind=link}
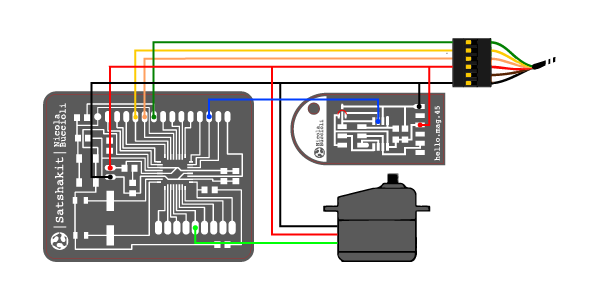
![[board]](http://archive.fabacademy.org/archives/2016/opendot/students/171/download/W13_servo.svg){kind=link}