Week 7
Computer Controlled Machineing
The seventh assignment is to make something big. Essentially we need to learn how to control a CNC router and make something in the square feet or square meter range rather than square inches or centimeters.
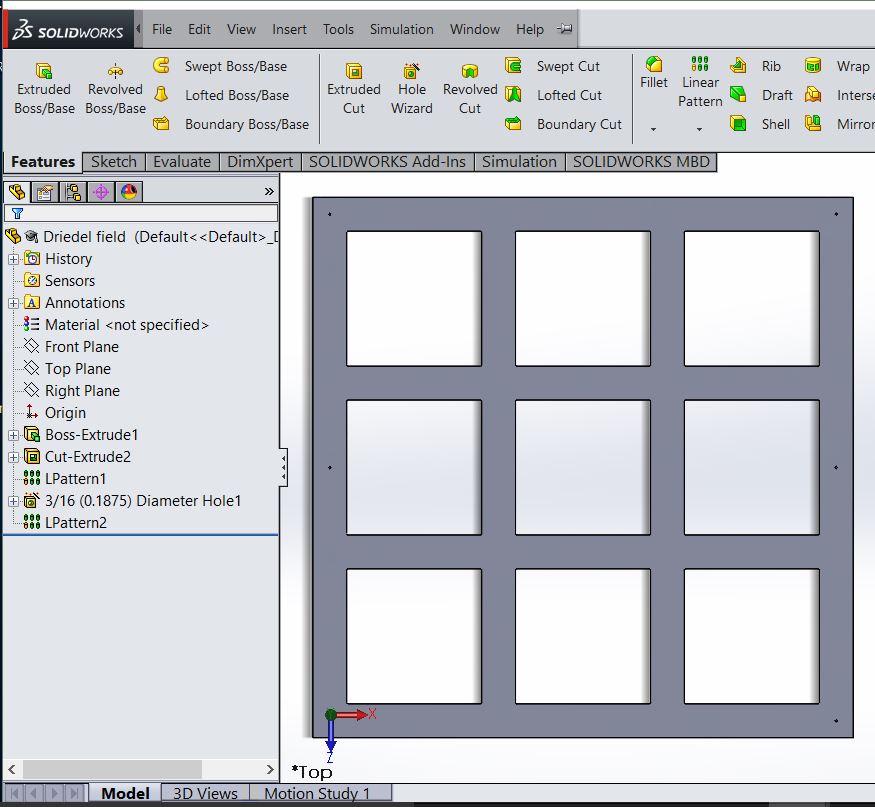
I will use a Haas SR 100 CNC Router in my robotics classroom to make the part. I will use half inch thick cheap low-quality plywood to make a prototype for test purposes and rapid prototyping. This part of the project is just a place to hold the one foot by one foot dridel dropping mechanisms a couple of inches off of the surface I will drop the driedels on. This prototype has six one foot square holes that will house six mechanisms. Likely this prototype will only see one or two mechanisms for proof of concept. I may need to make larger squares or otherwise modify the mechanism. I designed the part to be elevated by two 2x4's mounted on each side. I pre-drilled the pilot holes for drywall screws to mount the side supports.
I filited the corners of the square cut-outs so that a .25 inch end mill could cut the curve on the corners. I used Solidworks to design the files and Mastercam to make the cam files. Our router uses DXF files and the code contains settings for our Haas SR100 router. By entering the type of material, thickness of the material and size and type of bits, the software calculates the speeds and feeds that are optimal. The router has an automatic tool changer so we have 10 sizes of bits, endmills and drill bits pre-loaded in the tool changer.
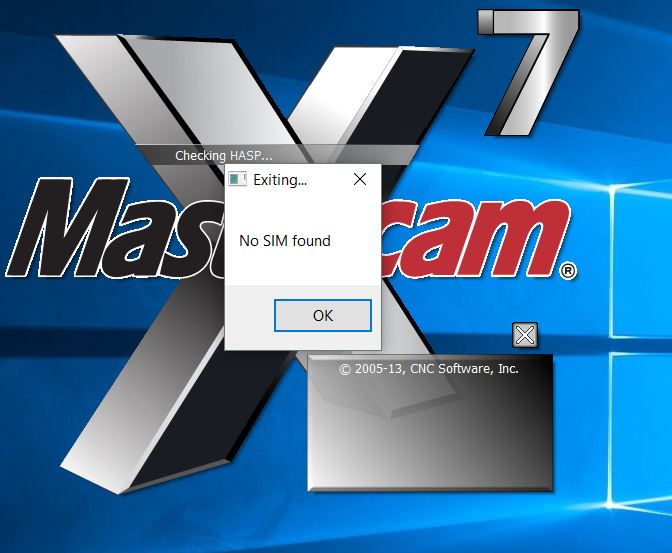
I am using MasterCam software as the CAM tool to make the cut paths. It is giving me an error code as I must have the dongle key inserted in my laptop to prove I have a legal version of the software. I do, but it is in use in the router while I am writing this. We are making robot parts for our upcoming FRC competition in Orange County California.
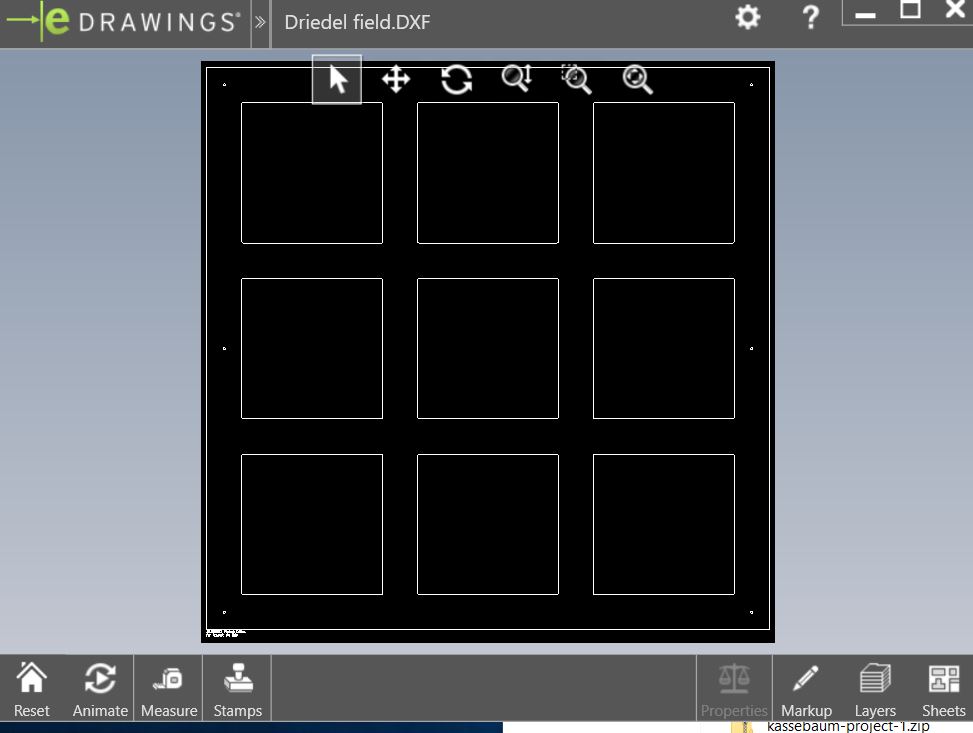
This is a screen snap of the DXF file that is output by MasterCam to control the process.

This is our Haas SR100 Router making the Driedel field from the DXF file converted to G Code by MasterCam. As you can see I am using C clamps to fixture the half inch plywood on the machine. We have a 3/4 inch HDPE sacraficial board on the bottom of the workpiece. We used to use MDF, but we also have a mister for use on 6061 aluminum that we build our robots with. The mister causes the MDF to swell and ruins our tolerences. Hence we switched to MDF which costs more, but we don't have to reface the MDF nearly as frequently. We have an edge detector that automatically detects and sets the X and Y axis. We set the Z axis by lowering the bit and placing a piece of photocopy paper between the surface and the bit or end mill. When we can pull the paper and get a smooth cut, the Z axis is within a few thousandths of an inch.

This is hero shot of the final routered dreidel field board. Each rectagular space is to have one driedel dropping mechanism to drop up to 100 dreidels per square. This field serves as a support for the mechanisms. I really didn't have any problems making this. It was one of the easier assignments for me to complete. The router has been in my classroom for the past three years and I am rather comfortable using it...particularly with the help of some of my robotics students that know the hardware and software better than I do.
I