Kinect Mount
The mount for the kinect needs to be able to adjust height and pointing angle of the kinect. So I designed a mount in 123D Design and printed it afterwards with a 3D Printer. The small bridge that holds the kinect itself gets lifted by a screw thread mechanism which converts the rotational movement of the motor to a linear movement. This also allows for a precise movement (maybe a little too precise since the movement is very slow), since a lot of rotations are needed to lift the kinect.
The stepmotor and the metal rods are reused from old printer parts.

Next we build an attachement which can adjust the pointing angle of the kinect with a servo motor
Bringing all the parts together:

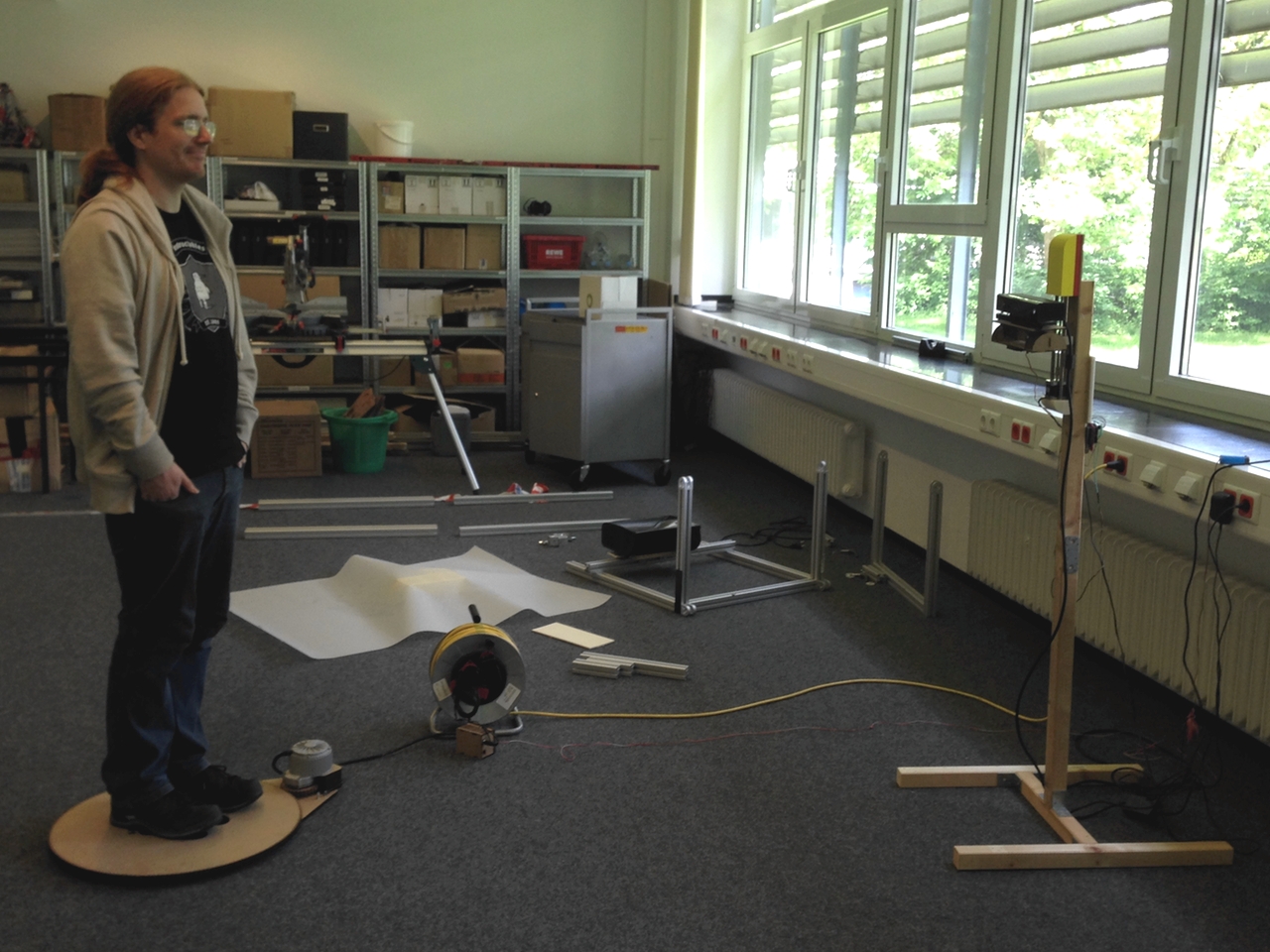
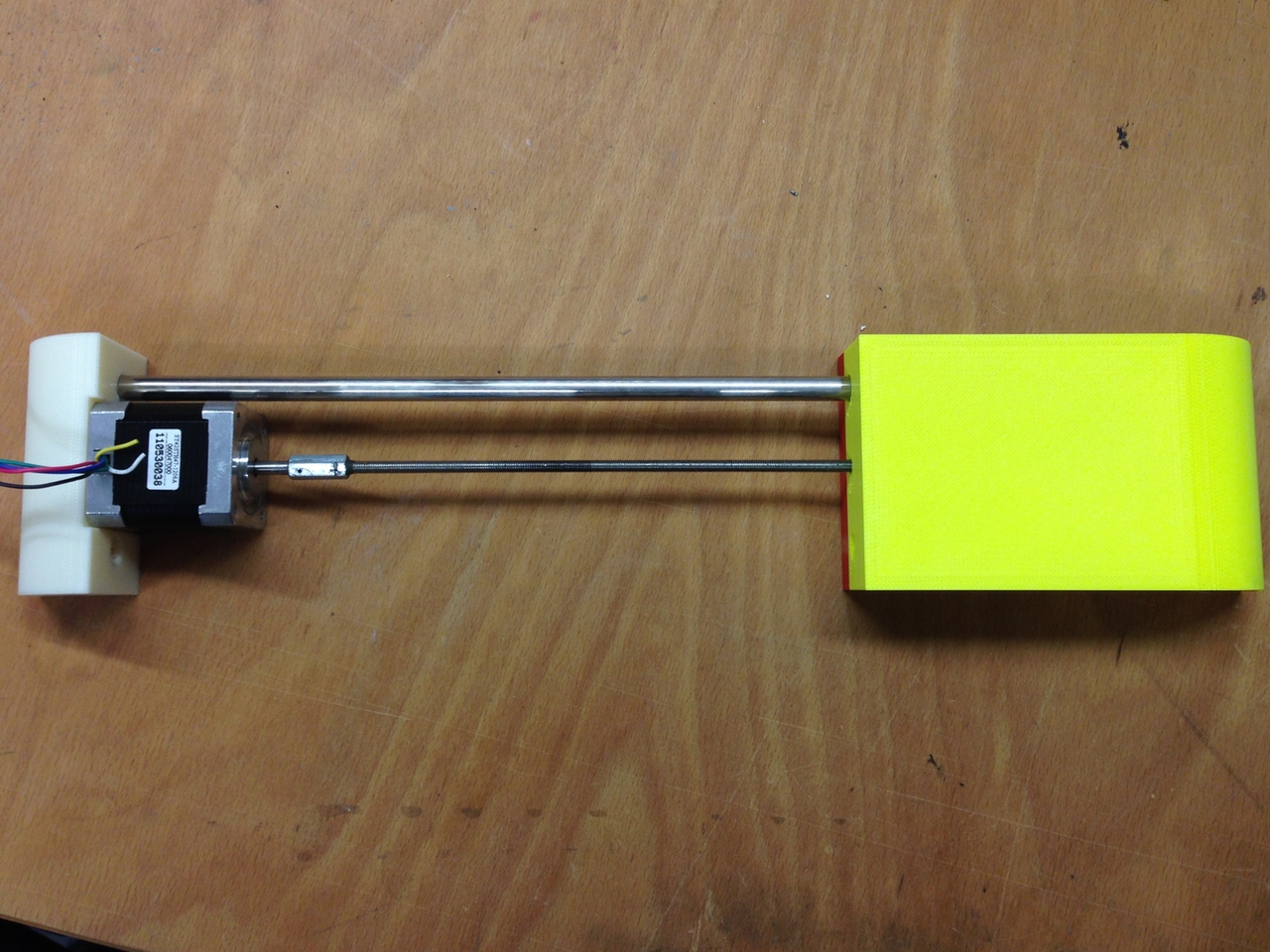

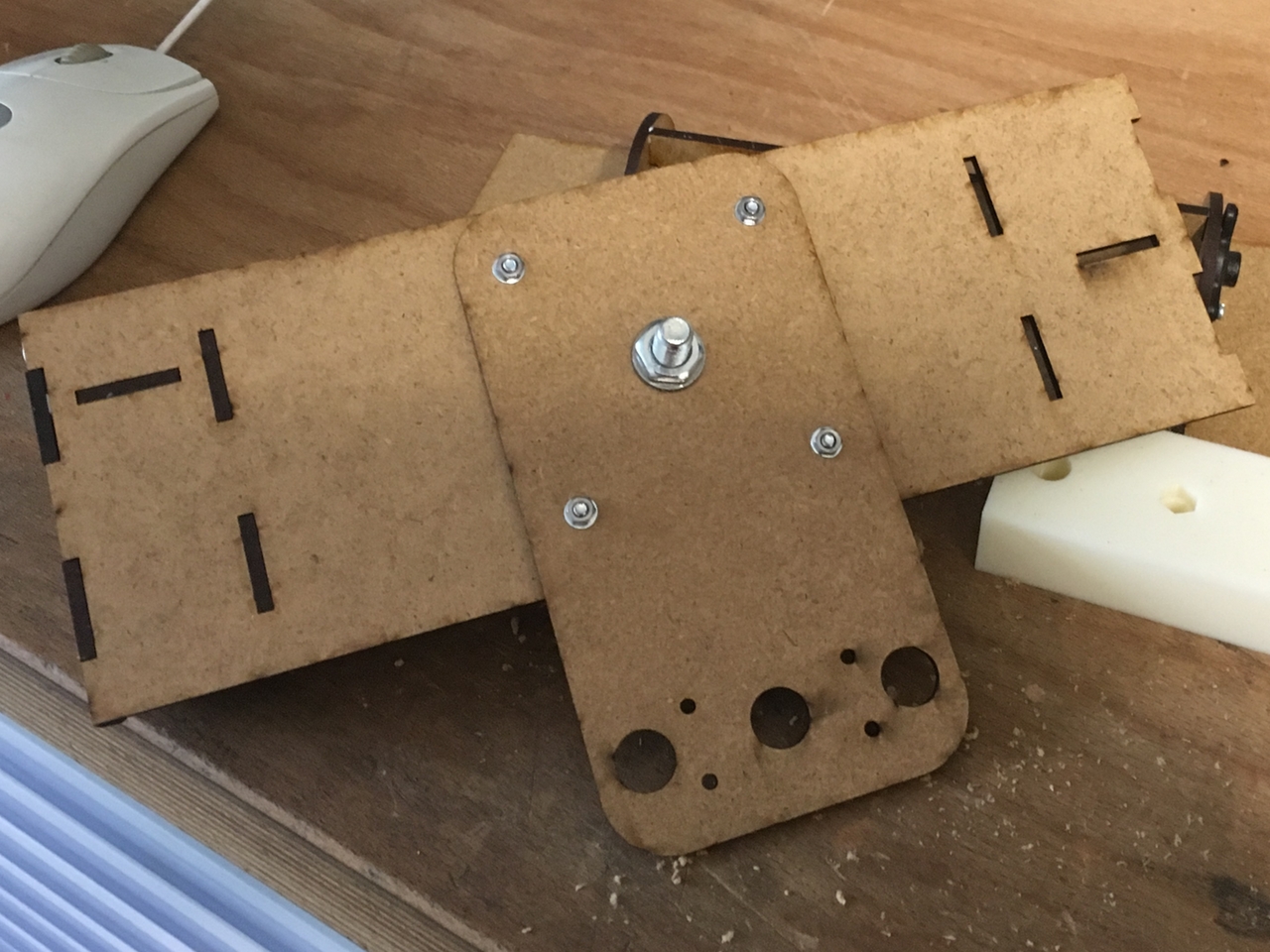



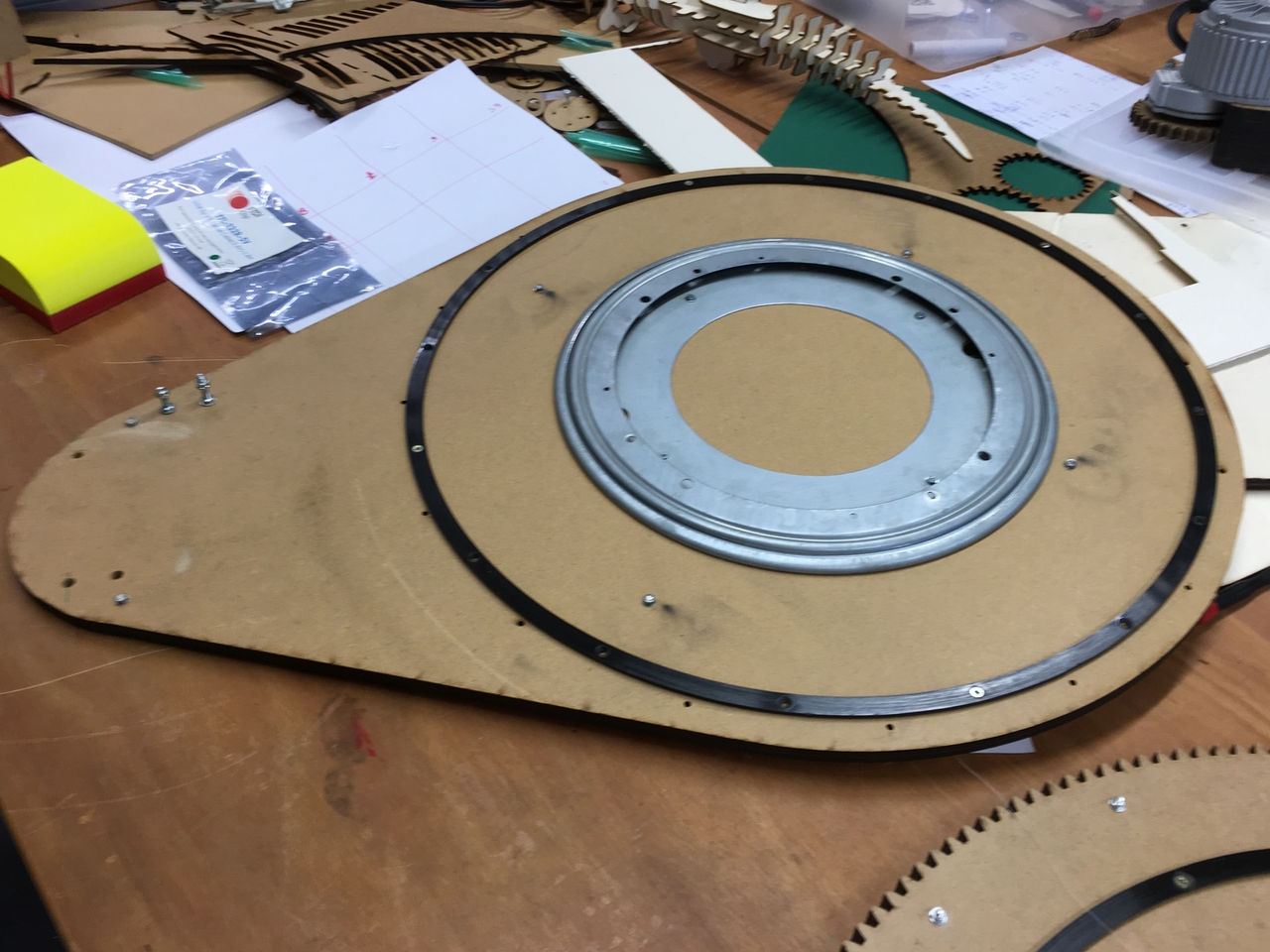

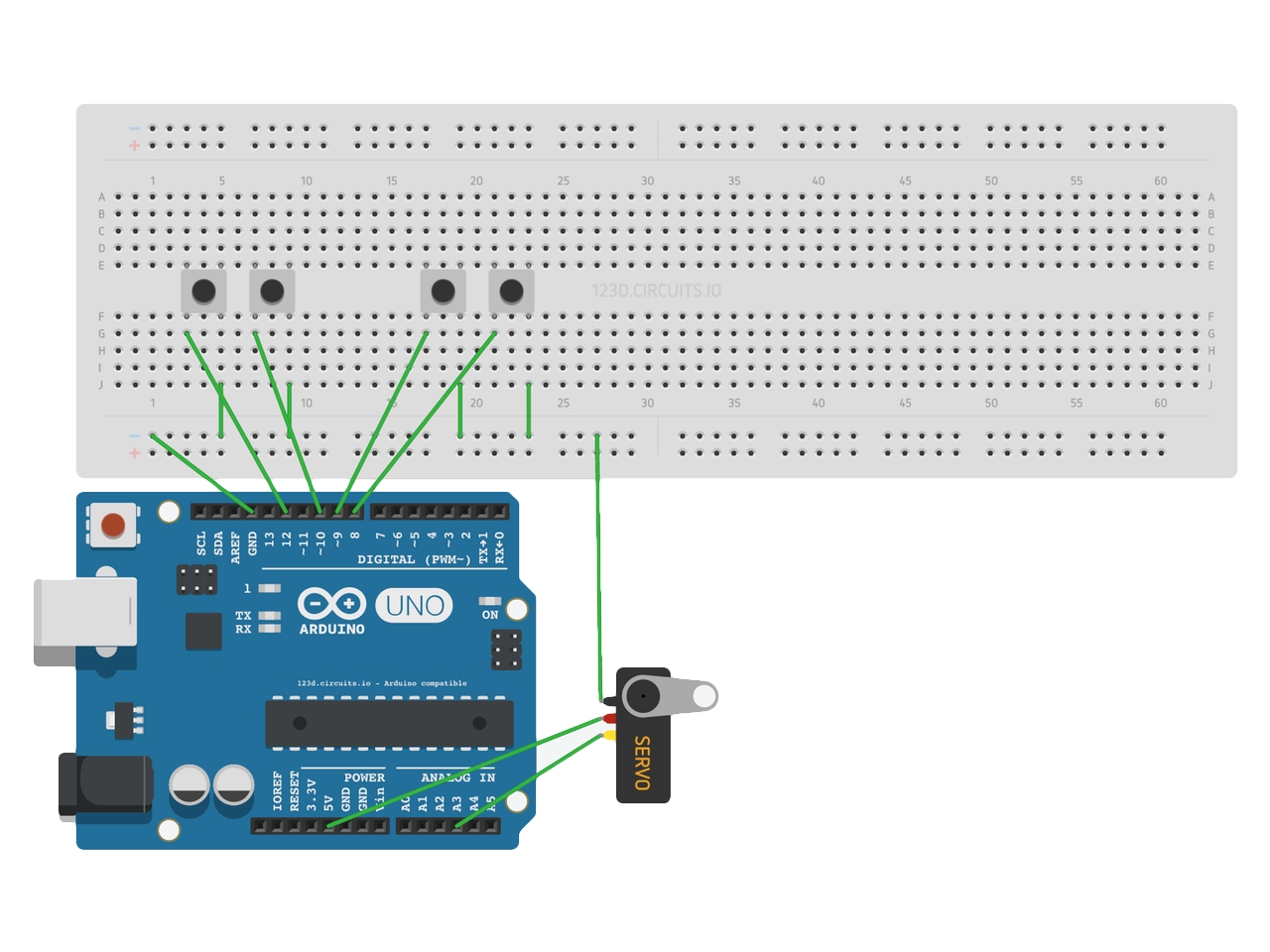 Image created in 123D Circuit
Image created in 123D Circuit