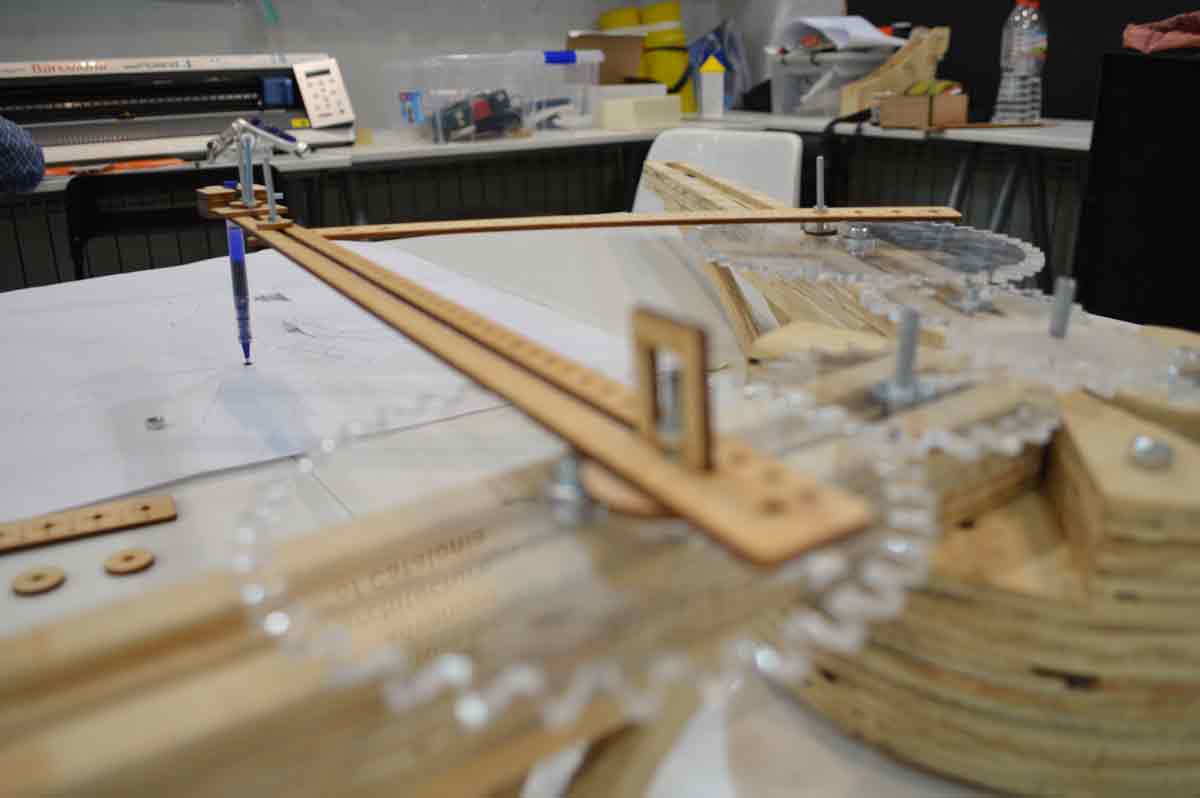
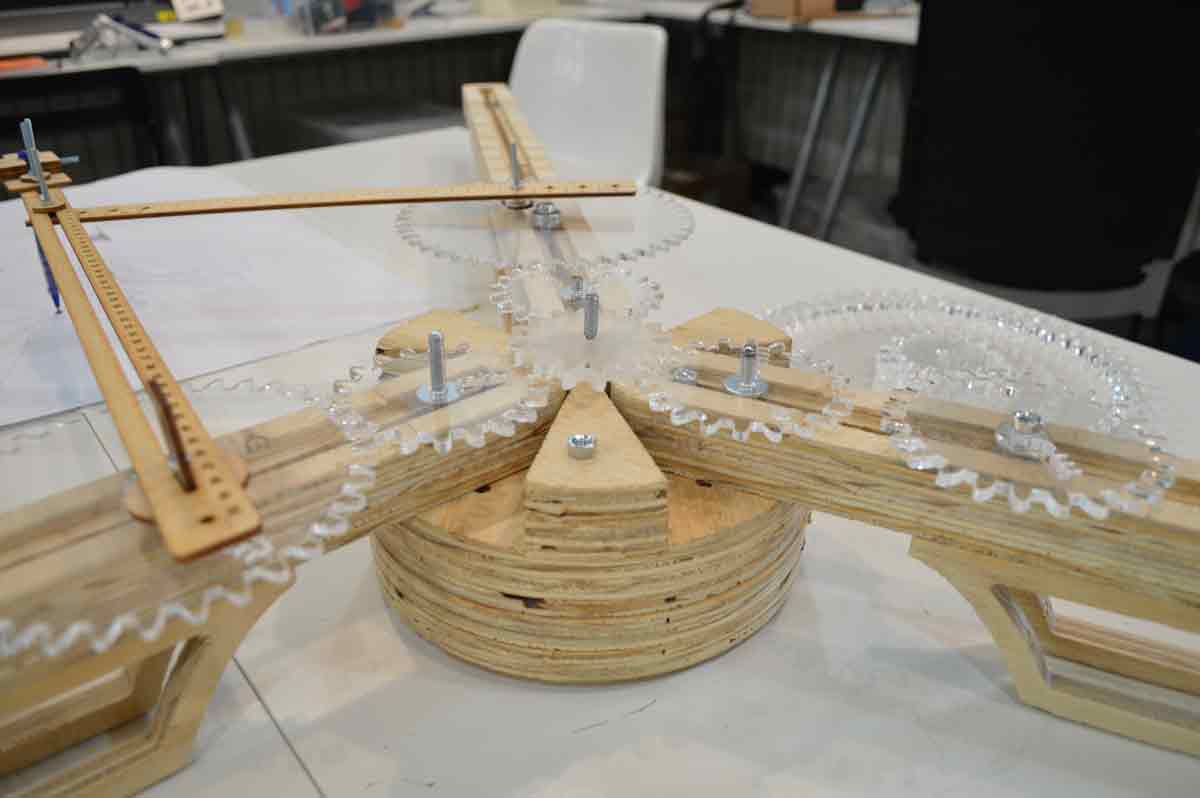
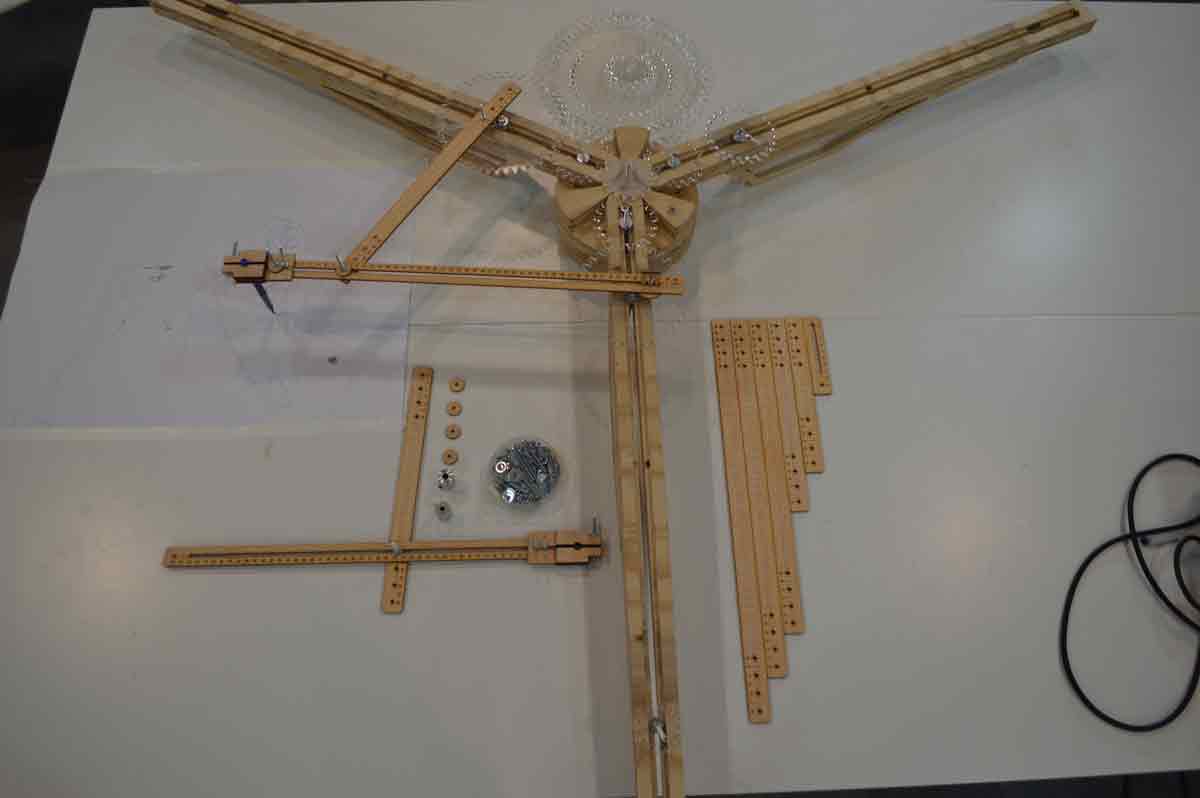
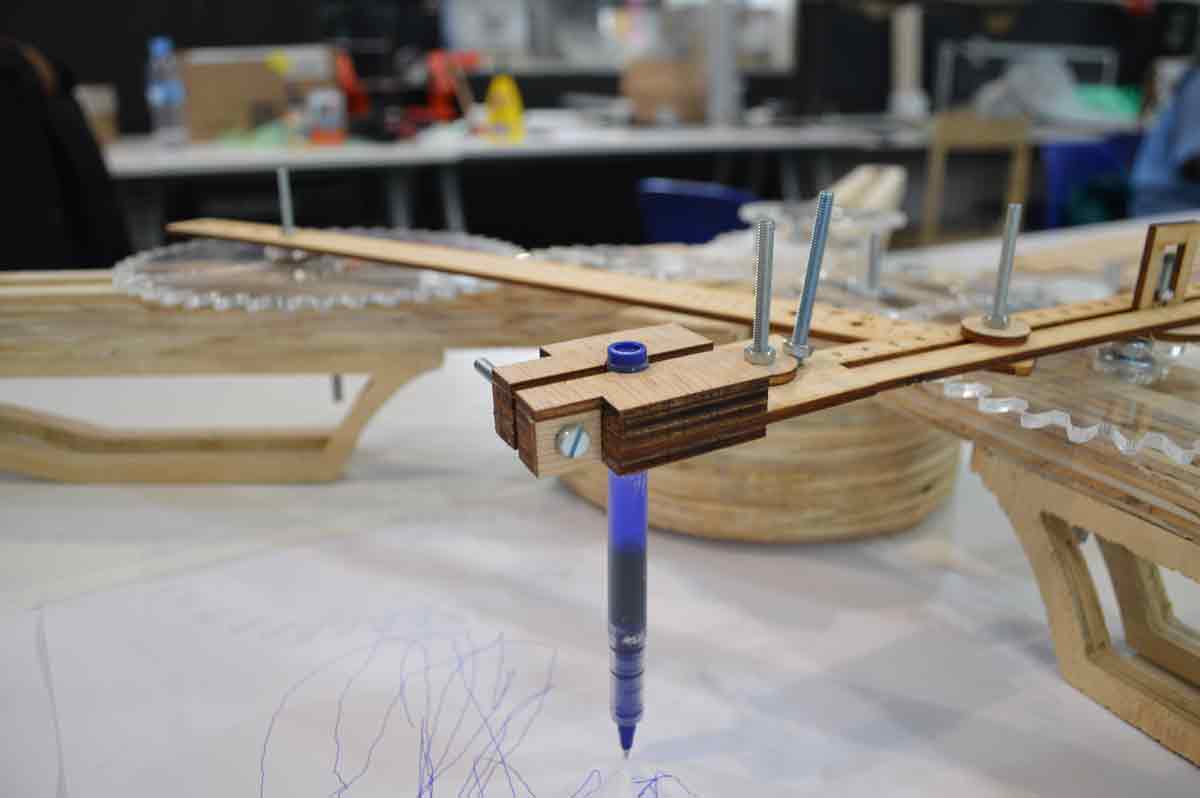
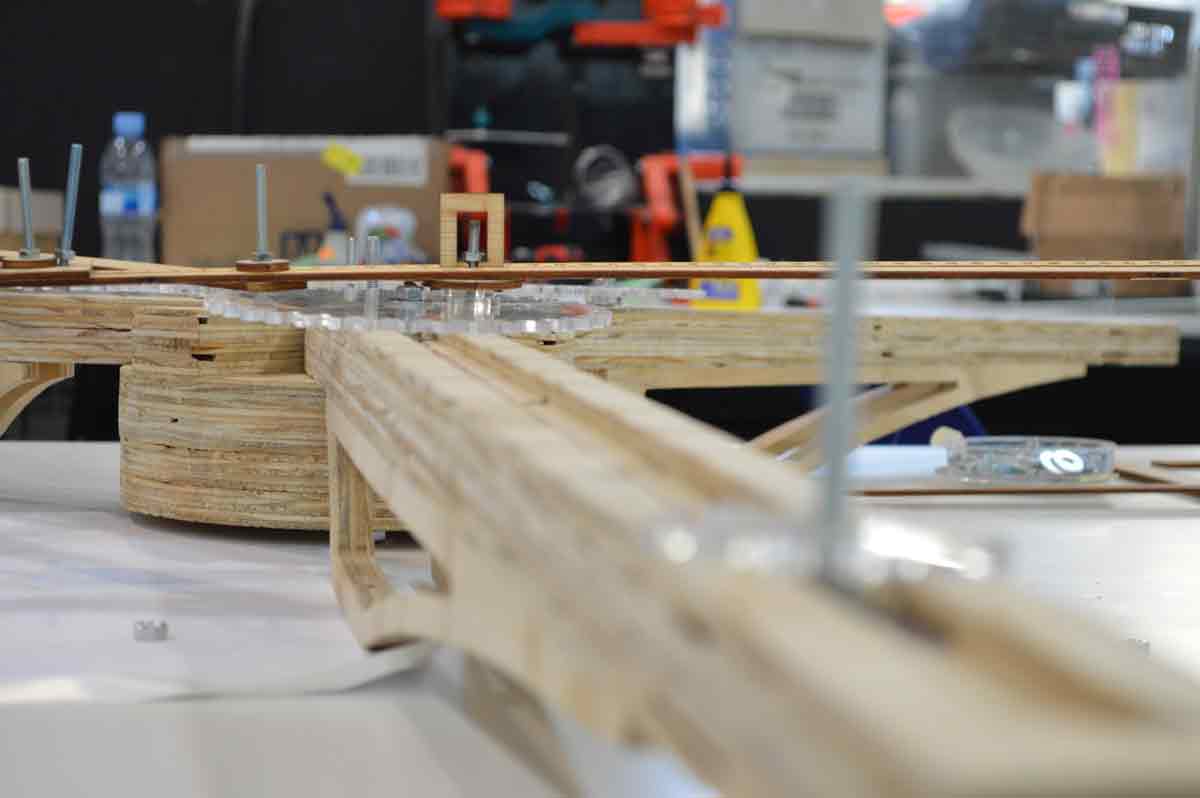
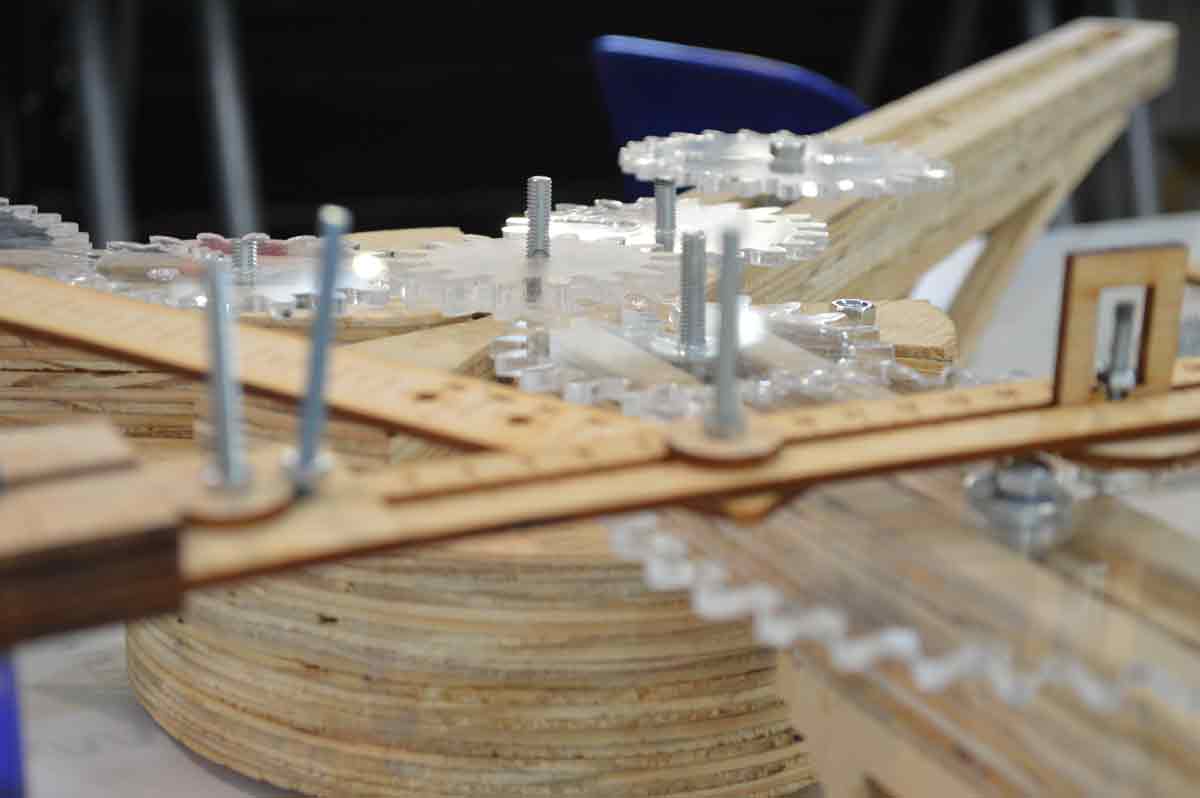
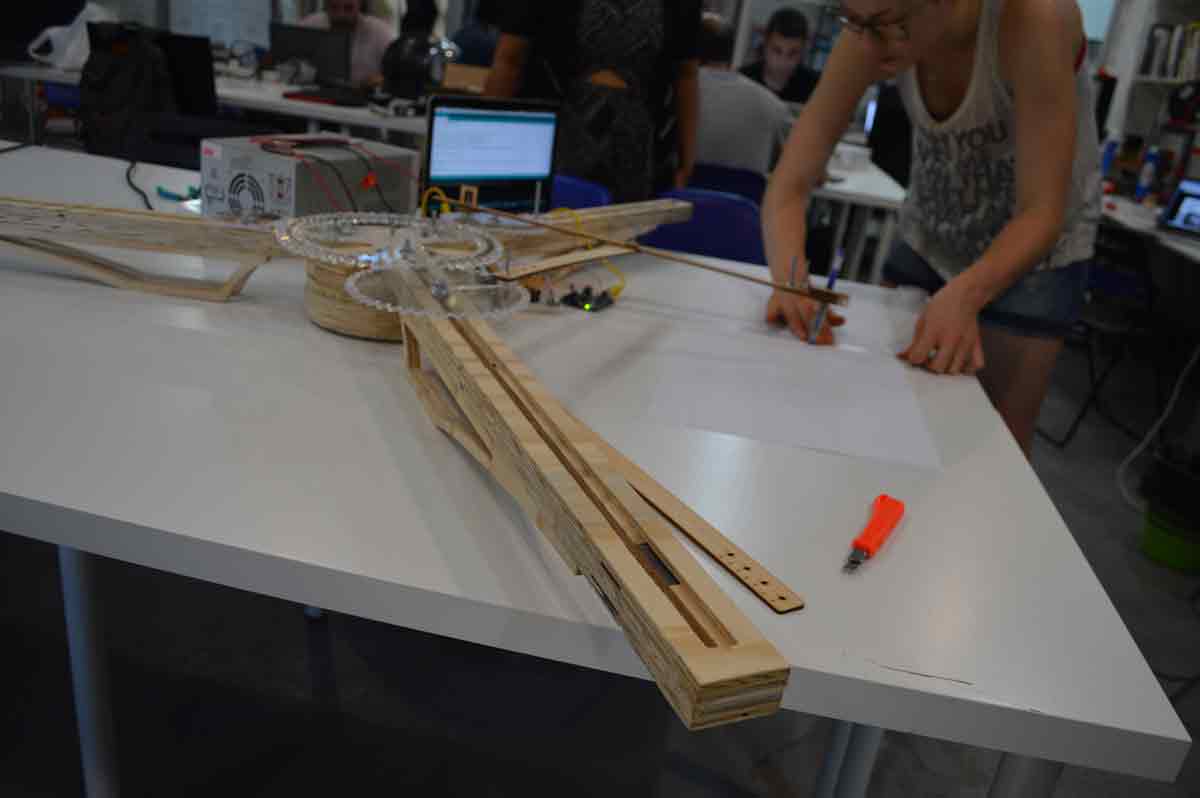
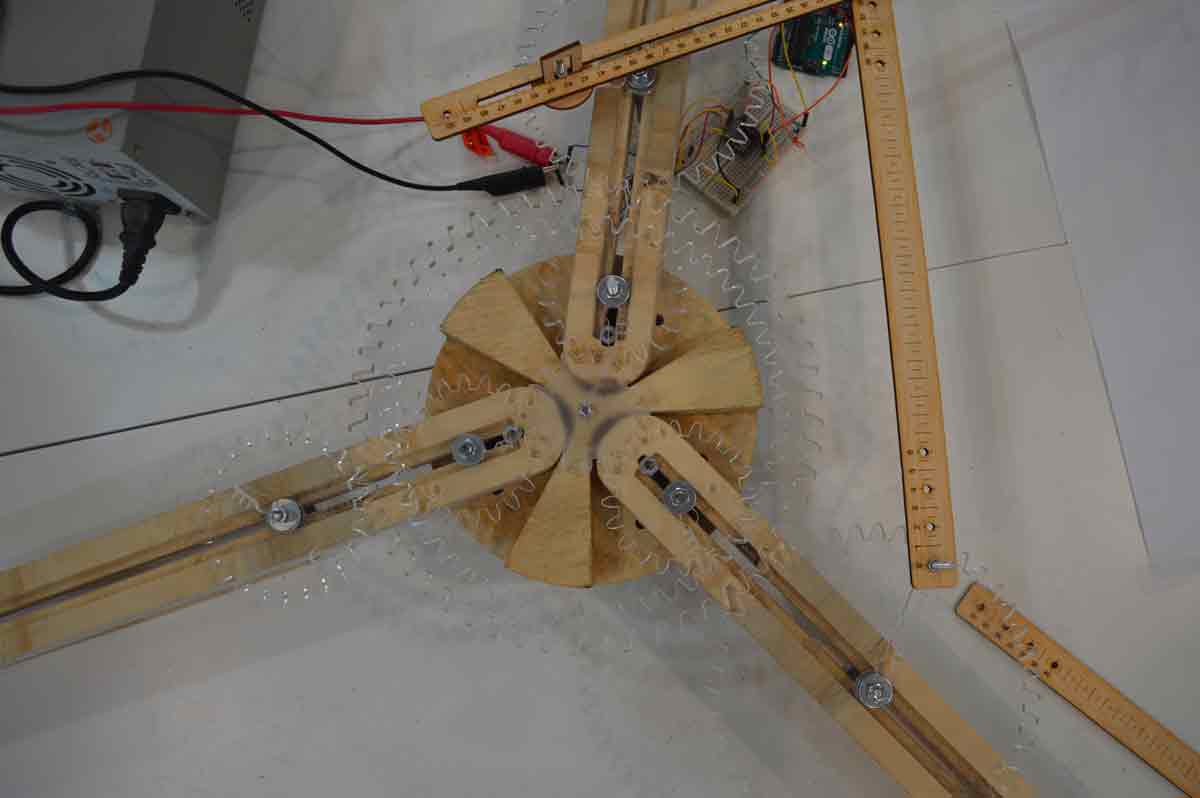
Final prototype
Here are some photos from the final prototype of GearAbility.
Here you can download all the Rhino files that were used for the design and fabrication of the final prototype :
gears1.3dm
gears2.3dm
drawingArms.3dm
general.3dm
rails.3dm
Plans for further development
We consider this prototype to be successful because the main goals that were set, were achieved:
-Multiple gears rotating
-Drawing arms producing images
-Automation with arduino
Nevertheless there are still a few unsolved issues, and many possible improvements which should be addressed in future research. Those concern both the hardware and the software.
The first issue concerns the integration of electronics in the machine.Right now the electronics are all connected outside the machine and the wires are visible. A better way would be to make a board that connects straight to the motor, and create a position for it in the core of the machine, so that the final product looks better, and is less likely to disconnect.
As far as the arduino code is concerned, at the moment the machine starts when there is power. To make it easier to use, we would like to add a button that turns on and off the machine.
What is more, we had a few issue with keeping the gears in straight alignment. We had the rail designed to hold the gear in place and in our drawings, we were sure it would work, but in reality the gears are not very stable. That is why the movement sometimes stops because the gears get out of place or stuck. This can be seen on the video as well, where there is a slight tilt in the motion of motors. We believe that with alterations in the types of washers and in the rail this motion could improve.
Finally, our initial idea was that this machine can draw on any type of surface, instead of only in paper. To achieve that, the base and the arms should be redesigned to be more universal.