Week 17 - Applications and implications
This week was really about answering critical question about the
propose a final project that integrates the range of units covered, answering:
- What will it do?
- Who's done what beforehand?
- What materials and components will be required? Where will they come from? How much will it cost?
- What parts and systems will be made?
- What processes will be used?
- What tasks need to be completed?
- What questions need to be answered?
- What is the schedule?
- How will it be evaluated?
What will it do?
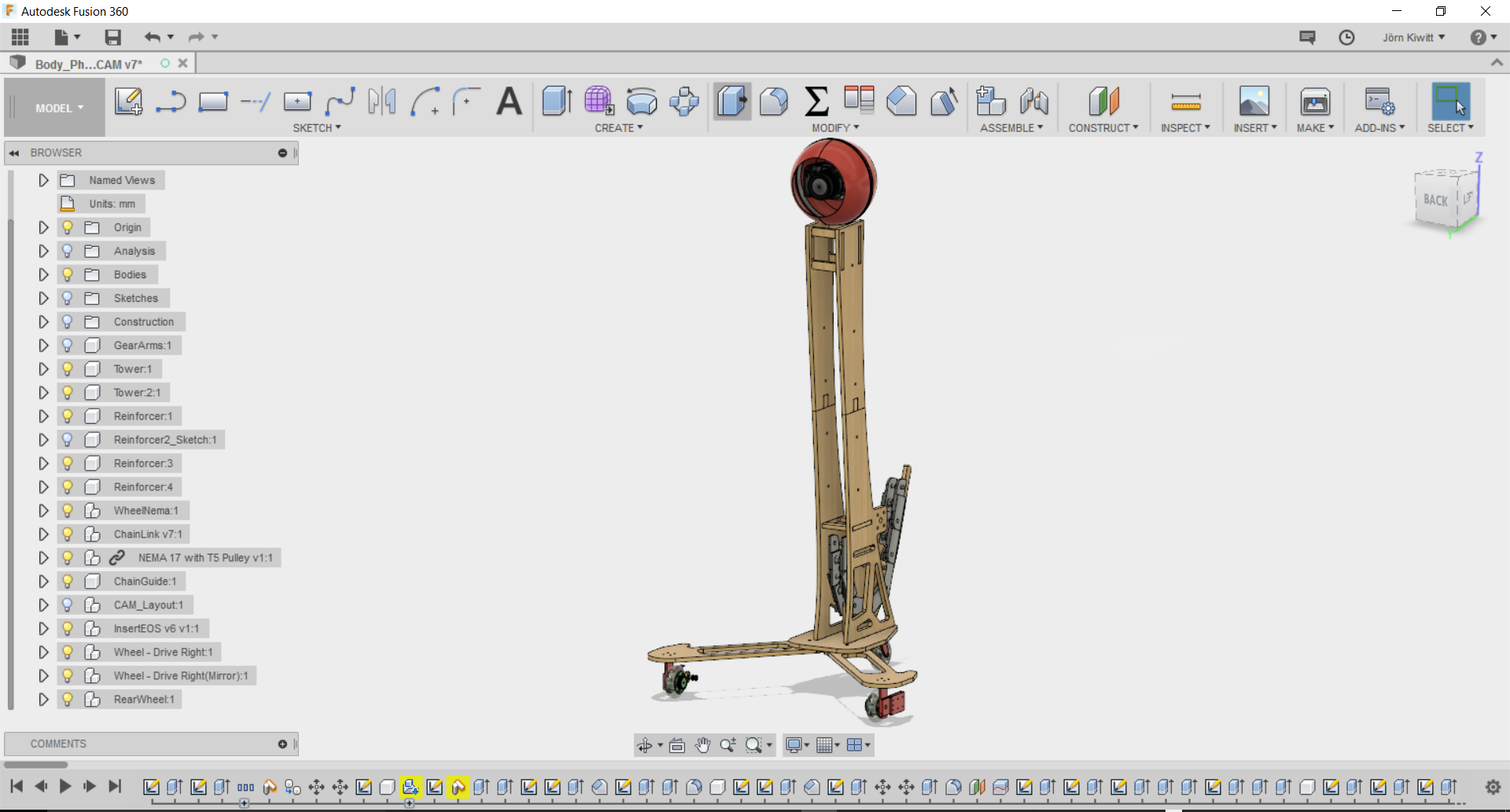
Obviously, my design has gone through a lot of iterations, but the basic idea is the same. A robot, that takes pictures of a scene from different perspectives controlled via a smartphone, that gives you live images, control the trigger for the camera and drive the robot around. The height and pitch angle of the camera can be adjusted as well, using servos and a stepper motor that drives a push chain.

Hardware
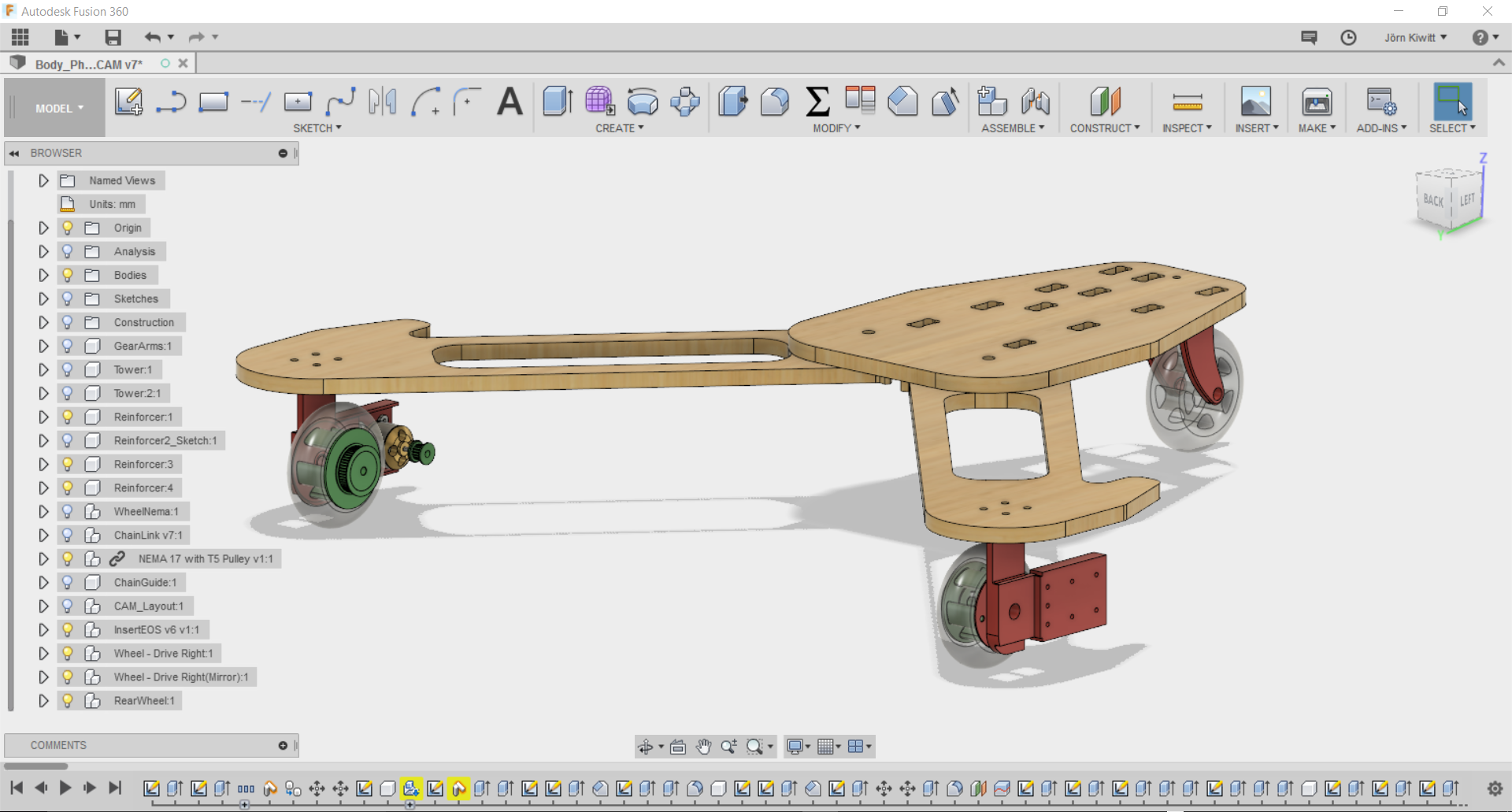
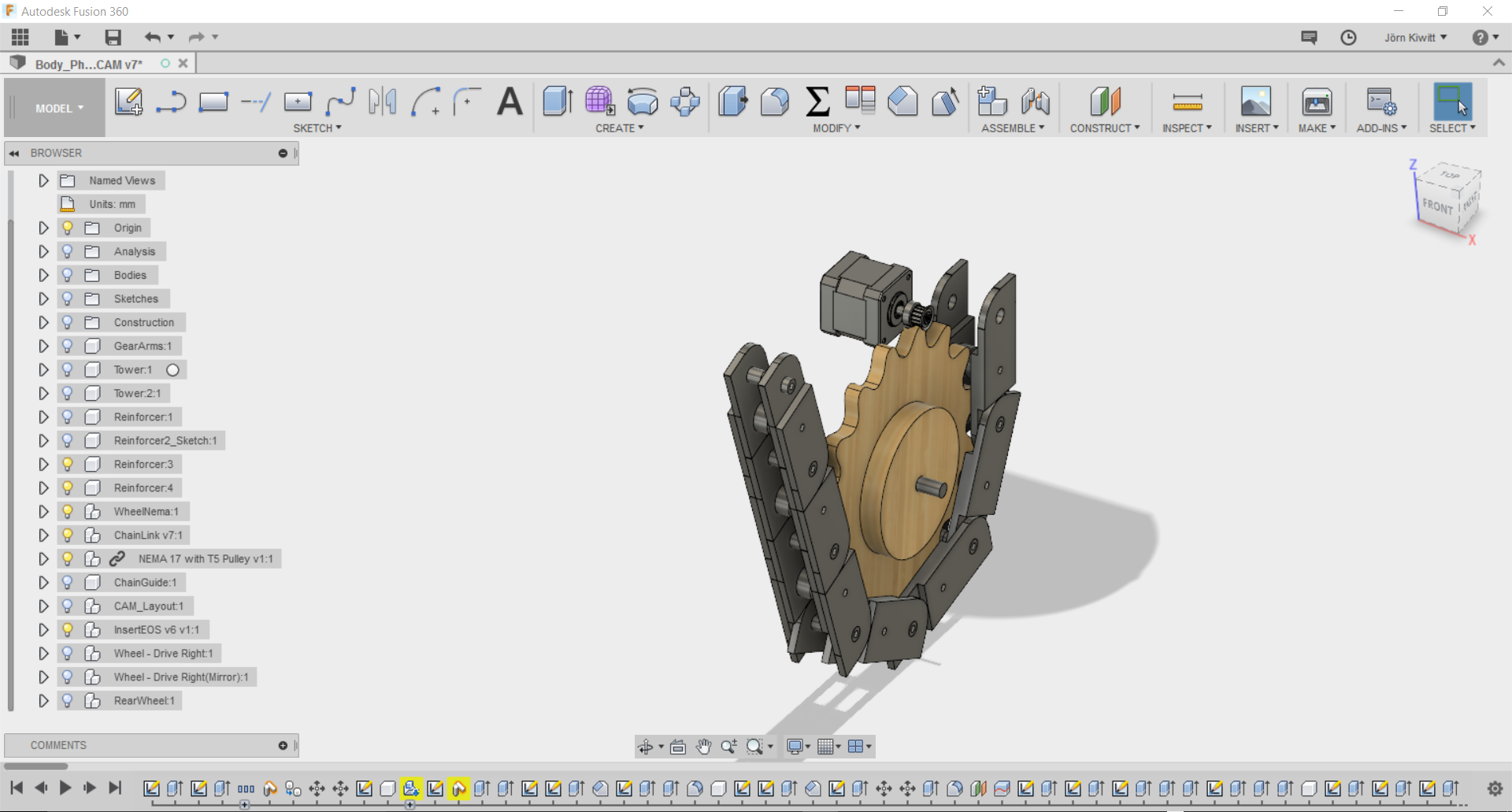
The drive module enables the movement of the platform by two BLDC motors, which are small, light and very quiet. The two powered wheel enable steering by differential trust set by the ESCs. The wheel are driven by belts. The third wheel spins freely to follow the drive direction. In order to enable forward and backward movement, two wires of the ESCs will be switch by relays. The chain - which is a push chain, will be driven by a big sprocket which is driven in turn by a stepper motor with a large transmission ratio. This will reduce the need your high currents. The chain will push out drawer rails on both inner sides of the tower, which are connected to the housing of the DSLR camera.
The kinematics for the camera, as well as an adapter linking the drawer rails and the camera still need to be designed.
Who's done what beforehand?
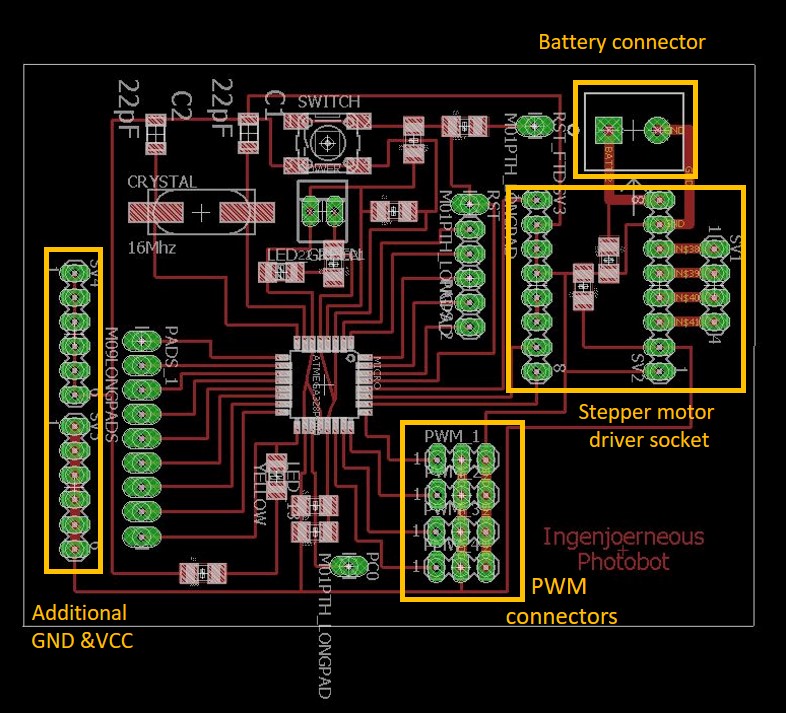
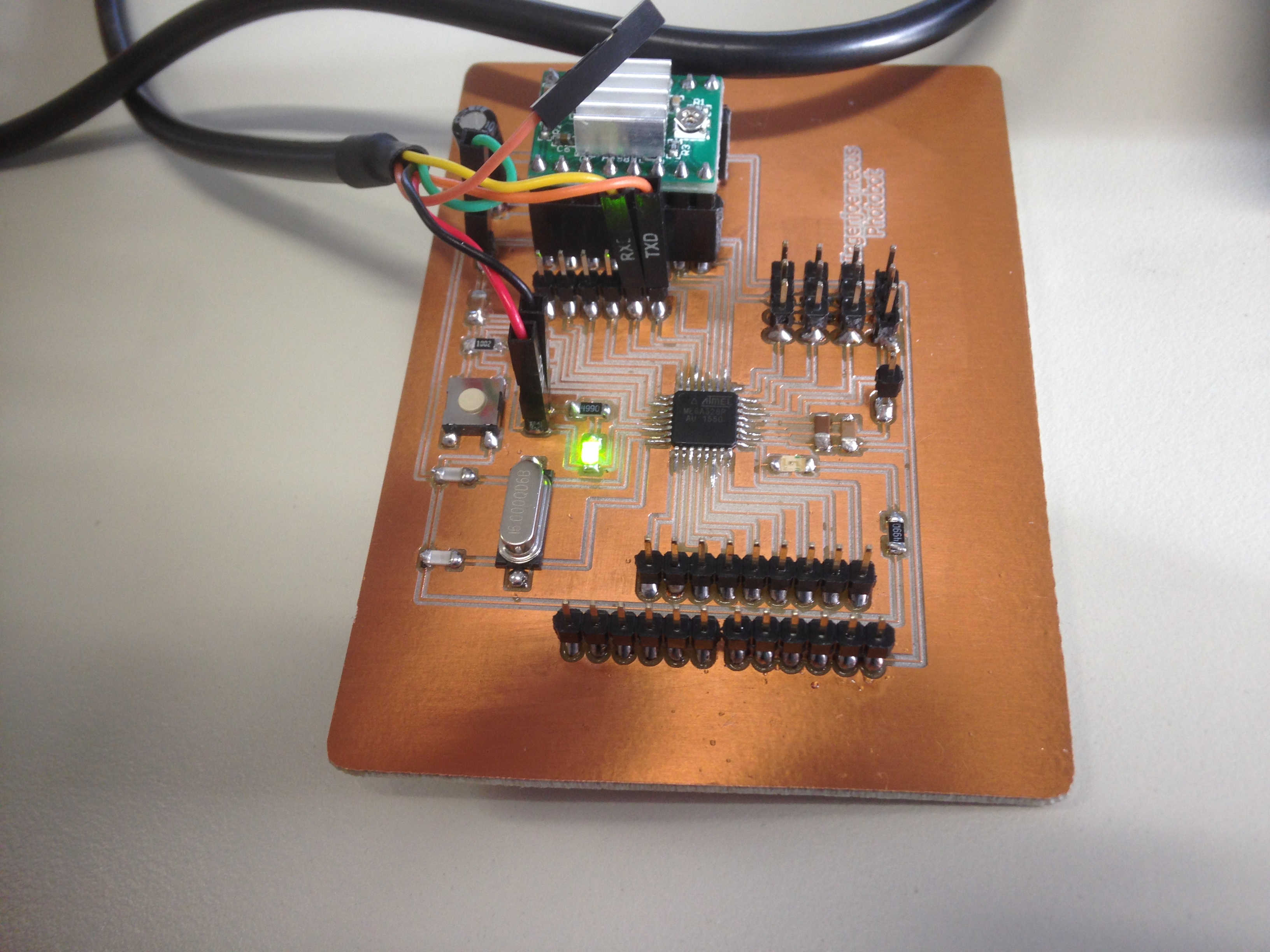
All output devices will be controlled by a modified satshakit, that I designed during my output devices week. The Satshakit is a design taken from Daniele Ingrassia. I also was inspired by another board which alread carries a stepper motor driver, but I basically did the redesign myself. The satshakit will communicate with a Raspberry Pi Zero W which will host the server for my communication with the smartphone. I will use Node JS and send the commands via a serial interface to the satshakit.

The design for the camera housing was developed in the composites week.
What materials and components will be required? Where will they come from? How much will it cost?
The overall cost was about 187 €. The belts didn't actually make it to the final design. But the DSLR camera and Rasperry Pi add the most significant cost. The way the bot is working currently, there is no specific need for the Raspberry Pi, an ESP8266 would do as well. Still, perspectively, it give me a lot more flexibility in further developing the system.
Please find my bill of materials below:
| Material | Specifications | Where to find | Price |
|---|---|---|---|
| Skate wheels | NILS Inliner wheels, size 80x24 | ebay | 13 € |
| Stepper motor | Nema 17 Stepper Motor 26Ncm 12V 0.4A | ebay | 10.5 € |
| Electronic speed controllers | 30A Brushless Motor Speed Controller RC BEC | ebay | 12 € |
| BLDC motor | 2212 13T 1000 kV out runner BLDC | ebay | 10 € |
| Relay | Dual channel DC 5V Relay | ebay | 8 € |
| Belts | GT 2 200 mm, 100 teeth | ebay | 5.58 € |
| Stepper motor driver | A4988 Stepper Motor Driver Carrier | Pololu | 5.95 € |
| Raspberry Pi | Zero W | The Pi Hut | 25 € |
| Batteries | Turnigy 2200mAh 3S 20C Lipo Pack | Hobbyking | 11.6 € |
| Axial bearing | 51104 20x35x10 mm | ebay | 2.2 € |
| Drawer rails | 700 mm - telescope rail | ebay | 11 € |
| DSLR camera | Canon EOS | ebay - small ads | 50 € |
| TOF sensor | V53LOX | Adafruit / EXP GmbH in Germany | 12.67 € |
| 360 degree servo | Andoer Spring RC SM-S4303R 360 degrees | amazon | 9.99 € |
| Sum | 187.49 € |
What parts and systems will be made?
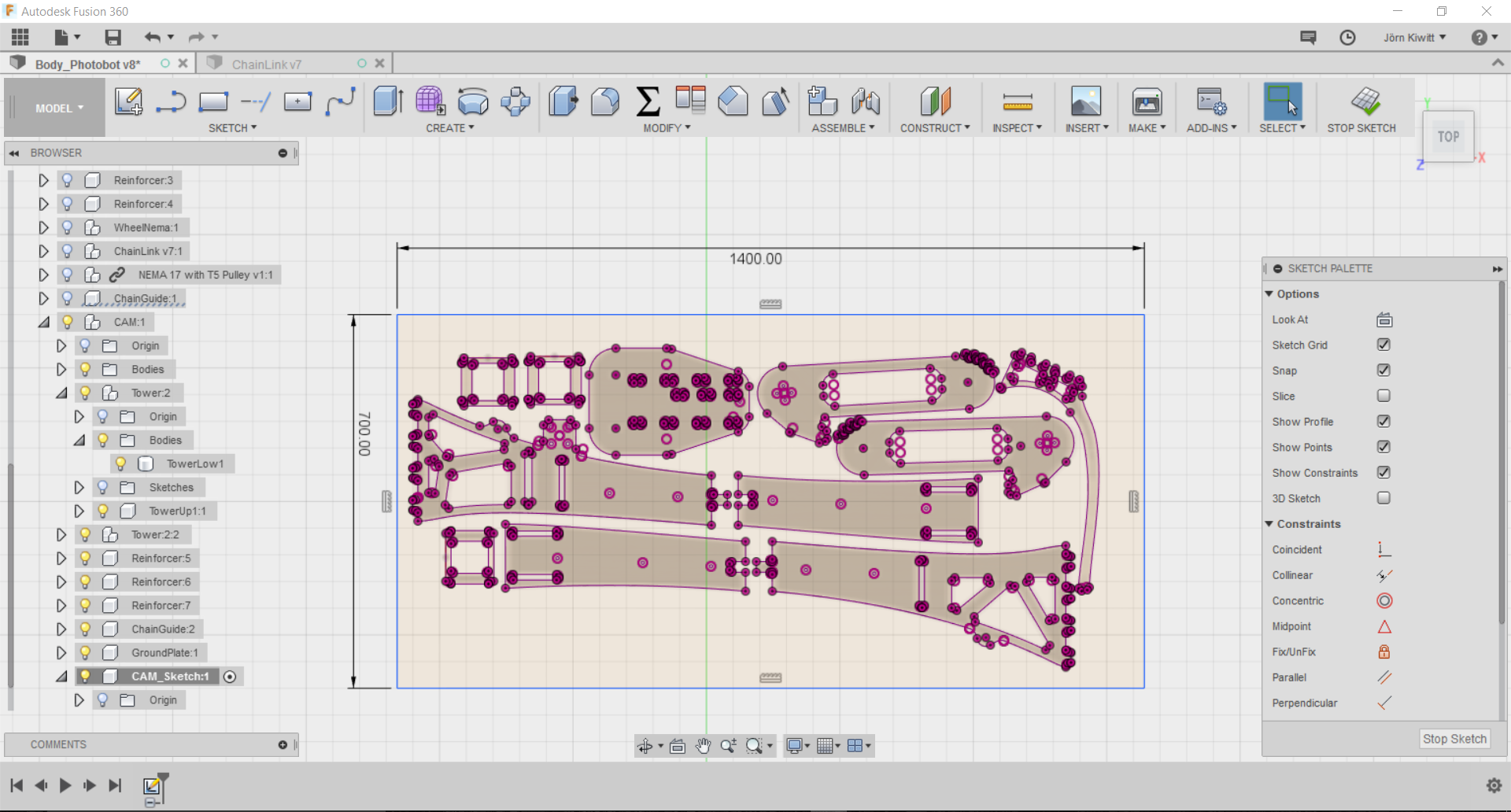
Basically, the whole body, the housing, the electronics, i. e. the satshakit, the chain, the bigger pulleys as well as the under carriage.
What processes will be used?
I will use CNC milling for the body parts. The camera housing will be made from composites.

The under carriage will be mostly 3D printed. The chain will be sliced and laser cut.
What tasks need to be completed?
Here is the list of to dos:
- Under carriage: to be 3D printed
- Body: CNC milled
- Chain: laser cut
- Soldering of all components
- Electronics integration
- Adapter: rail & camera housing
- Kinematics of the camera pitch variation
- Under carriage needs to be printed
- Camera trigger
- Smartphone web app (JavaScript)
What questions need to be answered?
Depending on the date of the final presentation, only parts of the project will be finished. I therefore divided it into must wins and stretch goals. A must win is the control of the platforms movement with a remote control.
What is the schedule?
Milling, laser cutting and printing by the 6th of June, afterwards focus on communication and software.

How will it be evaluated?
First priority is to make the platform move and the communication with the smartphone, second the height adjustment of the height, the tilt of the camera and last priority is the remote trigger with the smartphone (can be done with a commercial remote control) as well as live video stream and face recognition.