Design of the Final Product
How did I got to the idea of using air-screws for stepping forward? My first Idea was stepping forward through lifting the leg with a servo supported joint. In this case I would have included some kind of mobile attachement to keep the robot in balance staying on one foot, like grasping, hole fixation or magnet. And this would have meant to prepare the surface for each kind of locomotion. I've tried different kinds of design solutions and wasn't satisfied with them. Then I saw our micro quadrocopter in our fablab and just tried out what happend. It was amazing. That was the point when I decided to work with air-screws.
Product Realisation
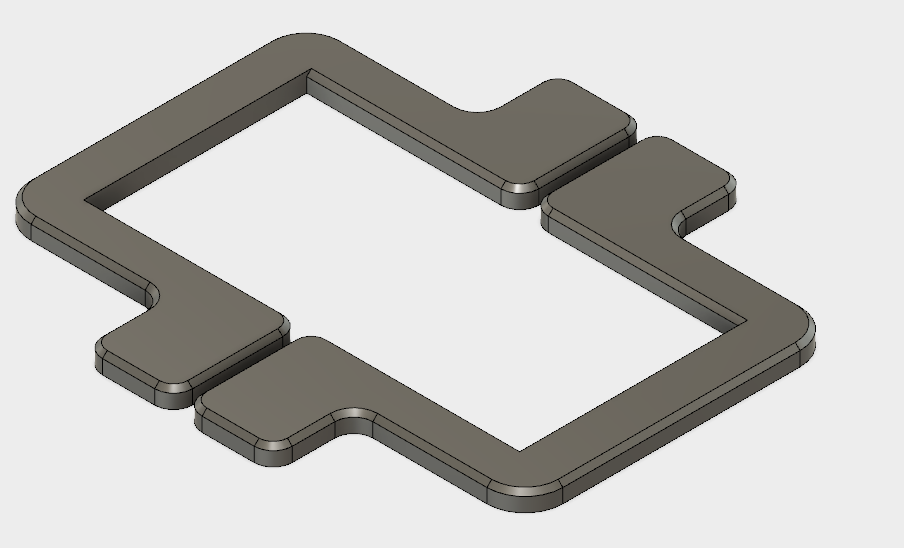
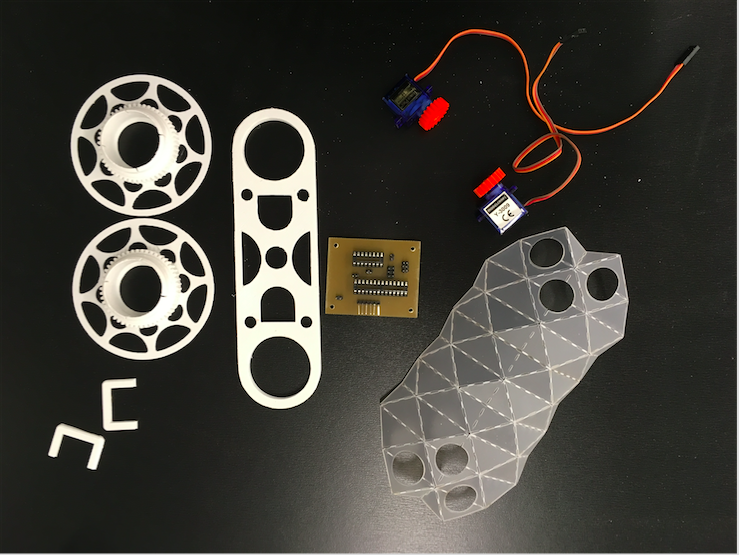
Fusion360 models:

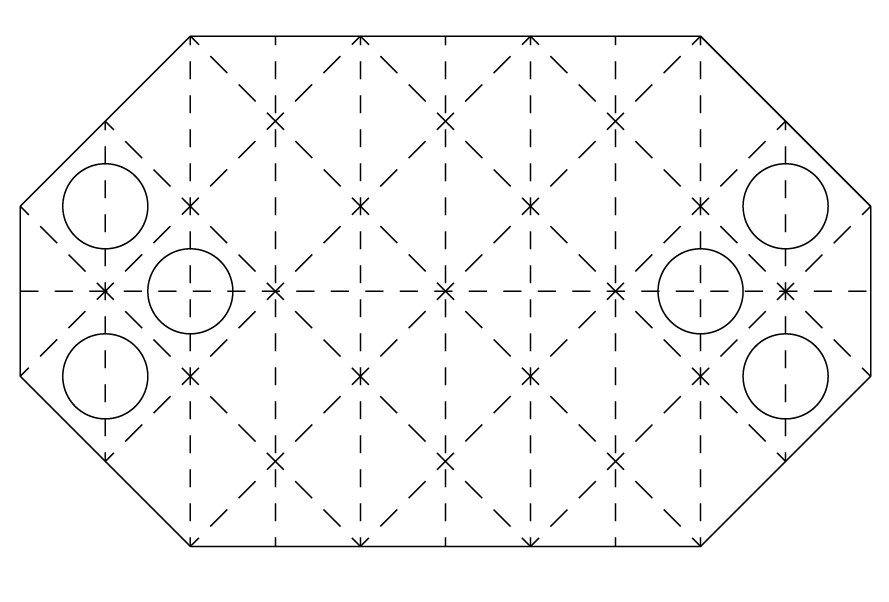
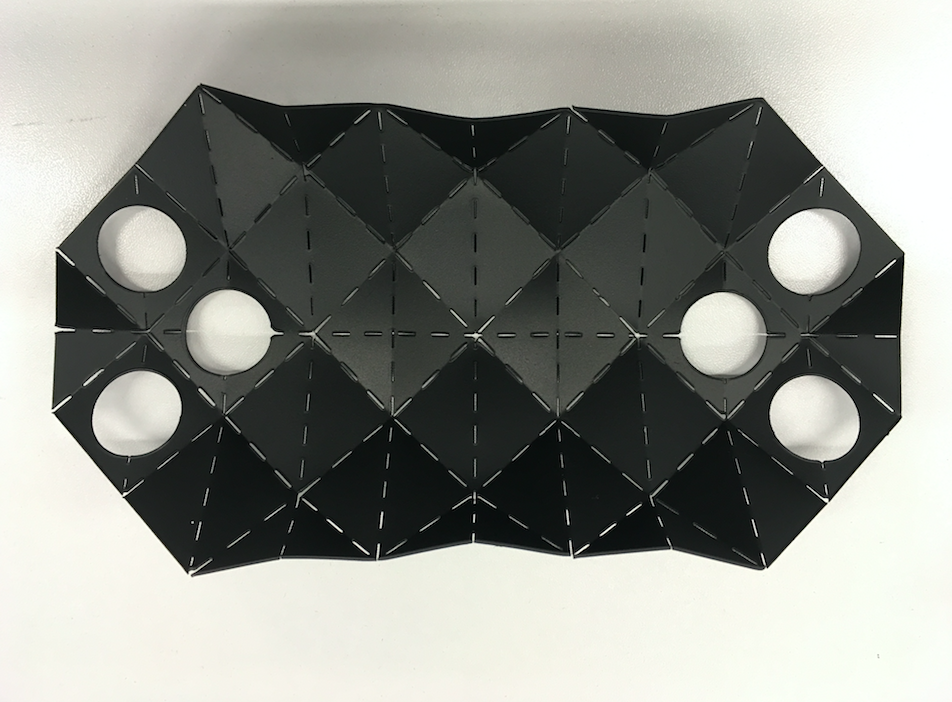
Adobe Illustrator drawing:
Printing on 3d Printer:


Air-Cussion-Test: just with the micro air-screws clipped in the foot.
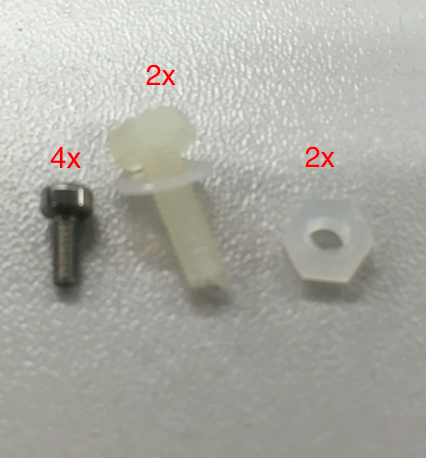
Screws (Ø2mm metall screw, Ø3mm nylon screw) for servo motors and pcb and clips for shell montage:
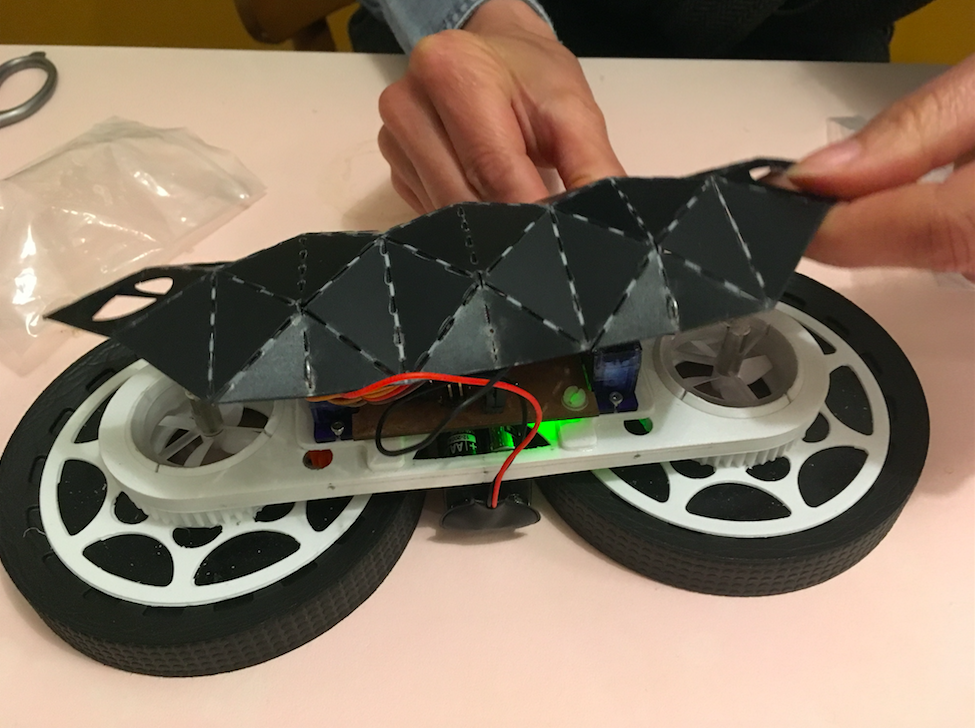
After preparing the body and programming and testing the pcb, I started to produce the shell.




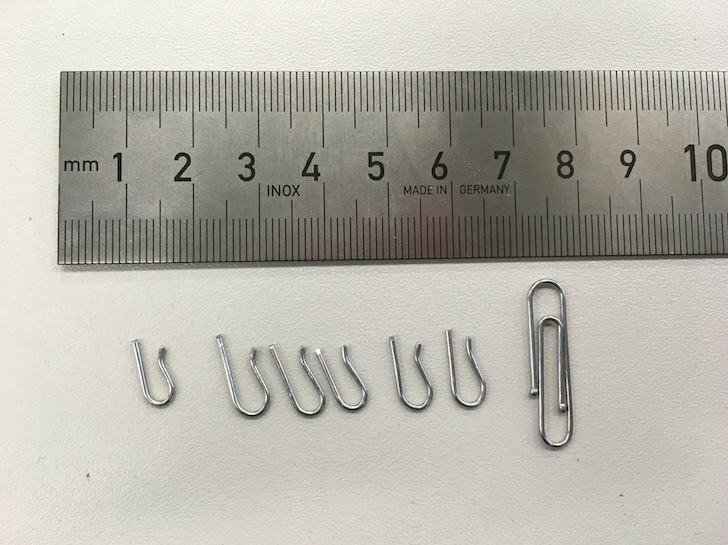
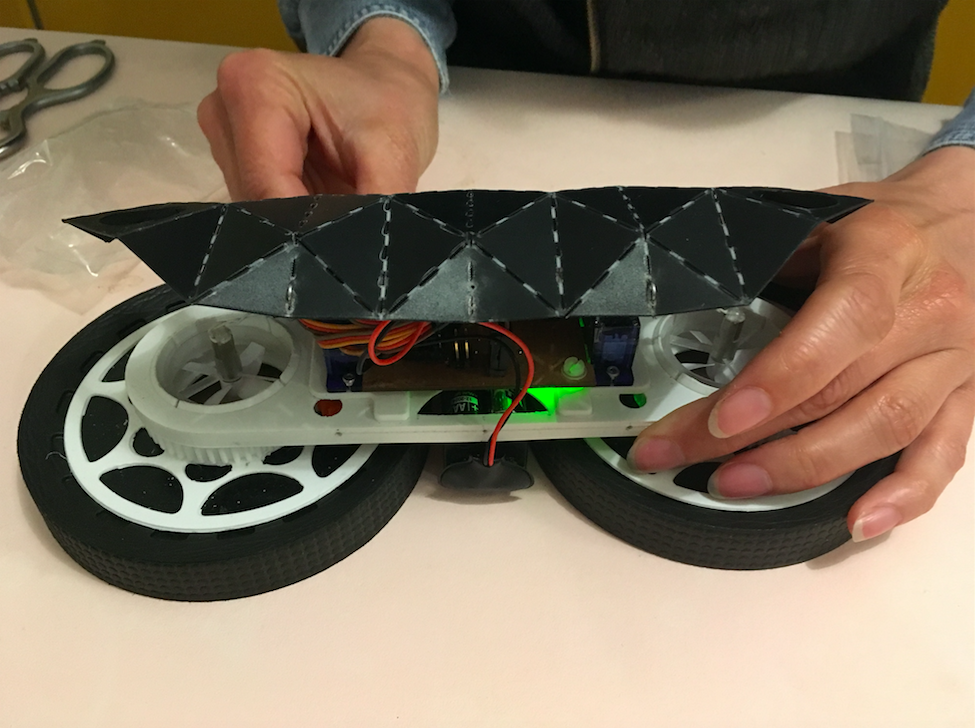
Now, you have to set the holes for the shell on the side of the traverse, check out the design of the shell and transfer the measured distances onto the sides of the traverse. In the shell I´ve used the lasercuts for leading the clips through. Drill small holes (about Ø1.5 mm). Three on one side.
After mounting the U formed distance holders I inserted servos and pcb and fixed them.
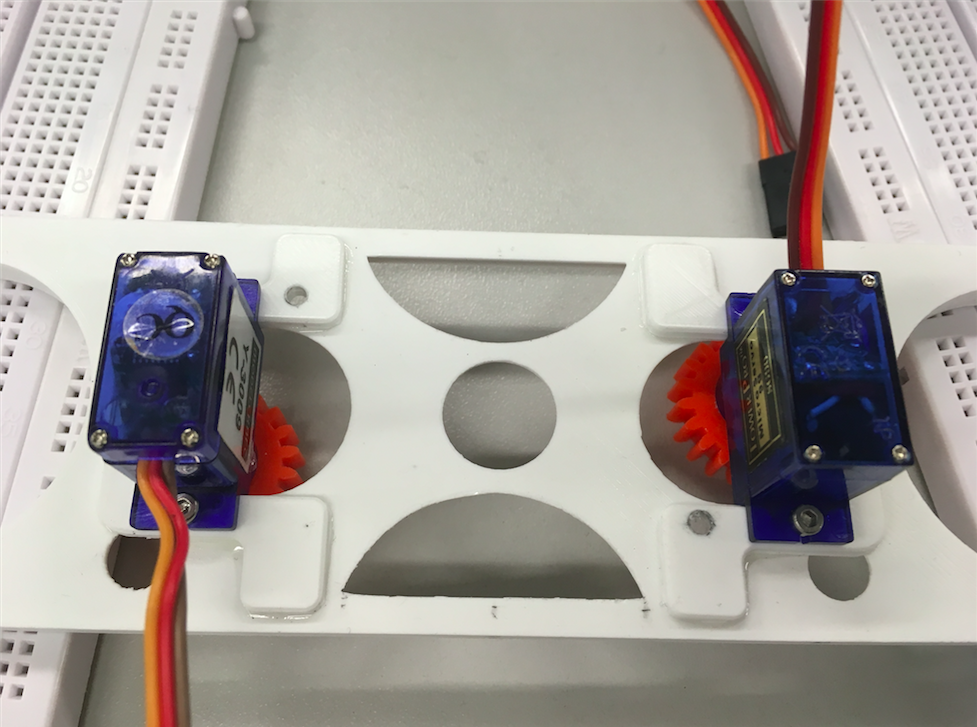

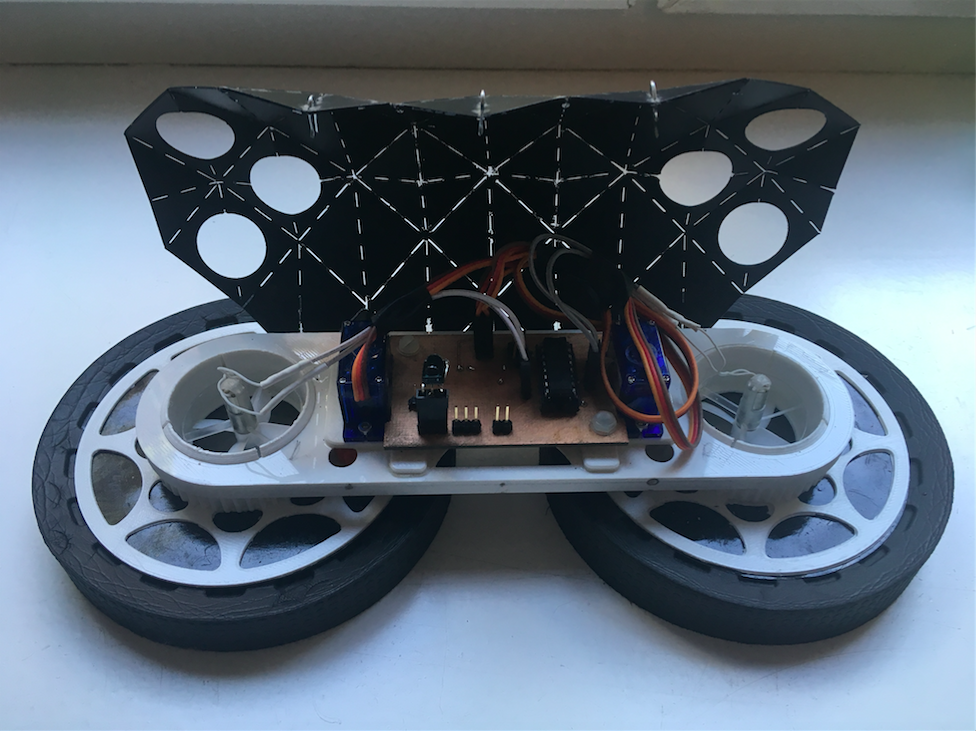
Now, start wiring. The reason why I kept all wires able to take them off is, that I can remove and exchange the motors and the input sensors. By this I can adapt and individualize my railbot, try different input or output components, programming my railbot and let it walk via cable.

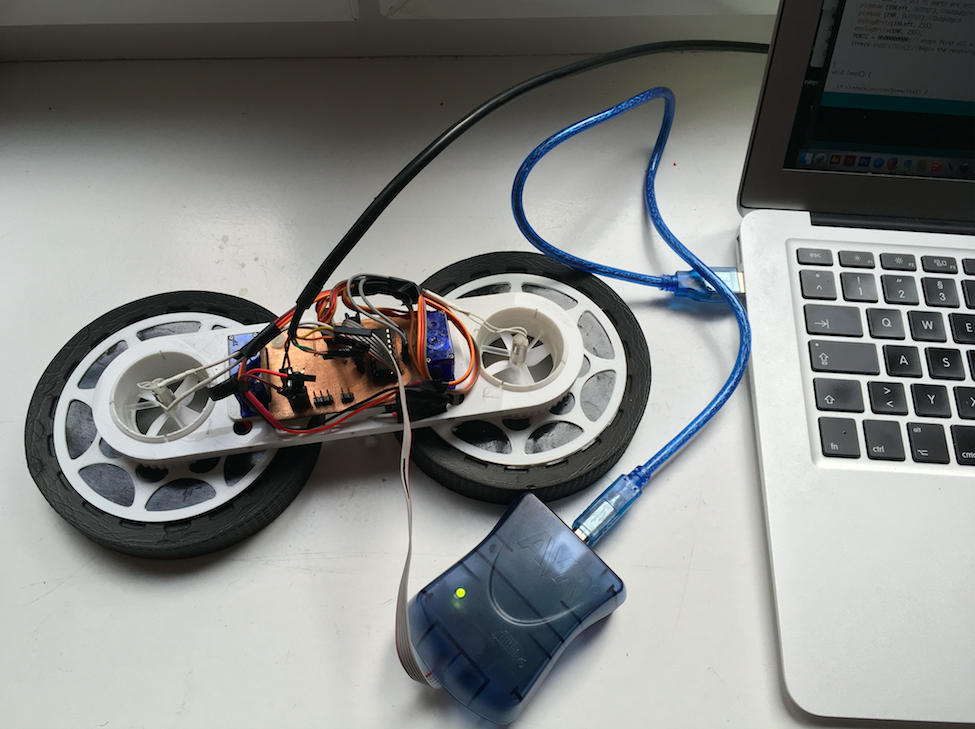
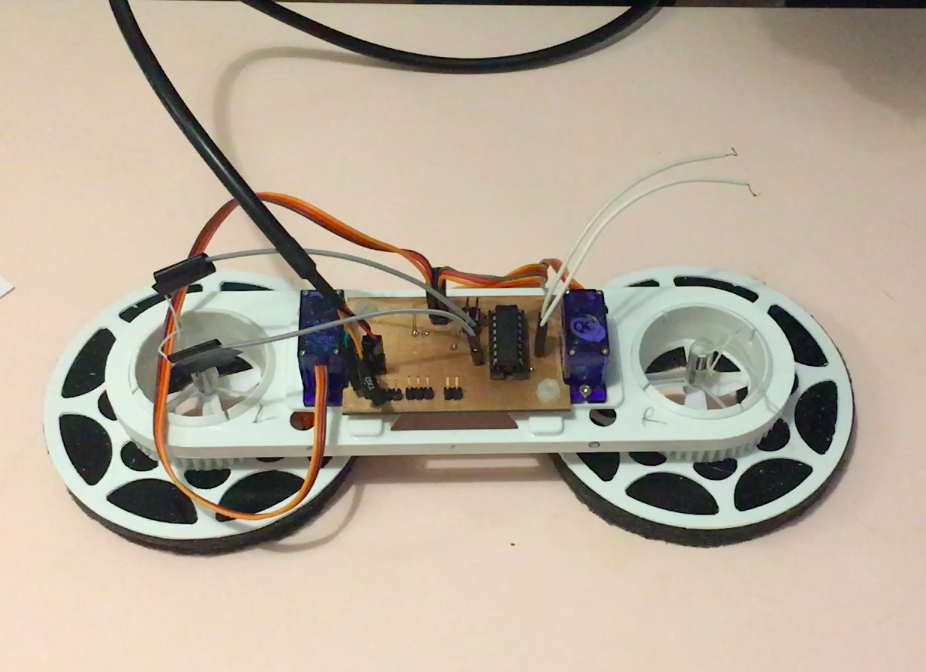

After everything went well, I started to mount the shell with my selfmade clips.




Download Files :
foot Fusion360
foot stl
montage aid Fusion360
montage aid stl
traverse Fusion360
traverse stl
shell dxf