FINAL PROJECT
PRESENTATION
IDEA
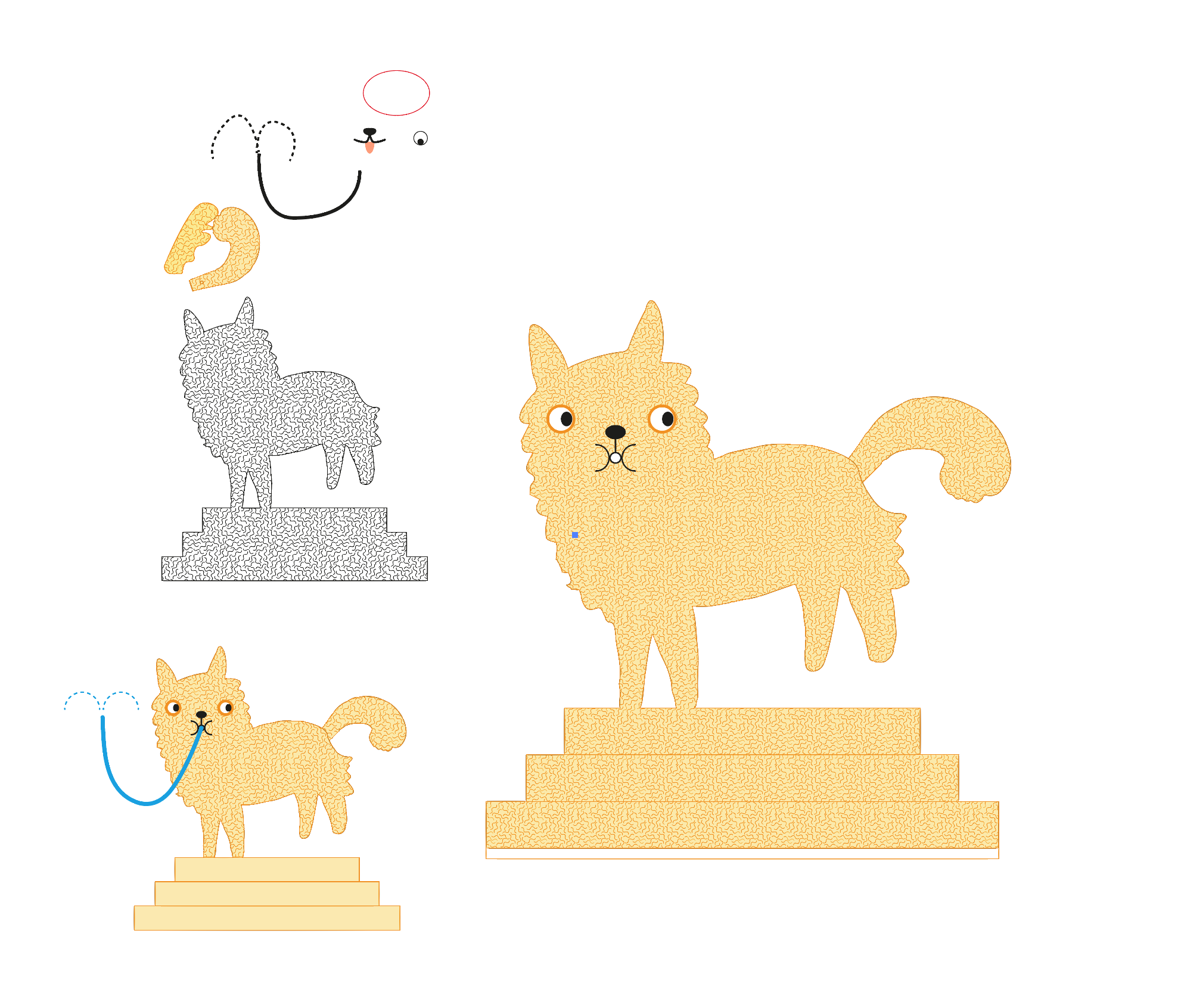
For my final project I decided to make an interactive illustration / sculpture, program its movement and design the way of displaying it. In the future I would like to design more similar objects / creatures based on same principles.
PROJECT DEVELOPMENT
I started with finding the right movement. I used files available on PAPER MECH. I downloaded a pdf and laser cut the elements in cardboard to make first motion test.

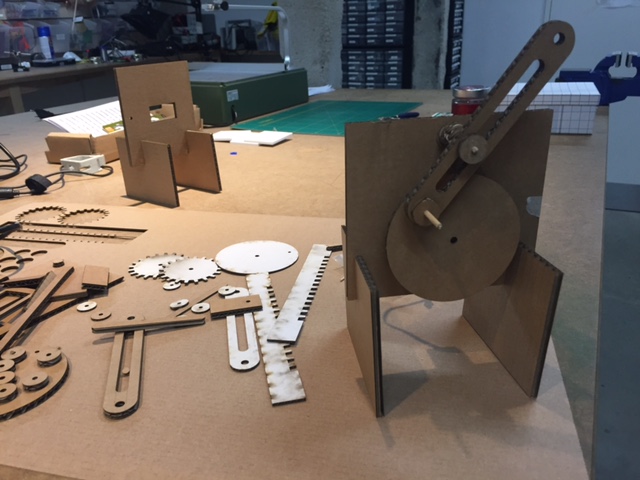
I also bought this book which explains how to make automata. It's really nice!
CONCEPT DEVELOPMENT
I decided to focus on making a sculpture of a dog that would wag its tail when you stroke it. For that I have to design a motion of the dogs tail and use a capacitive sensor for controlling the speed of the motor. I made this short video (trailer) to present my idea and show the concept development. As well as test the video editing skills.
FIRST TESTS
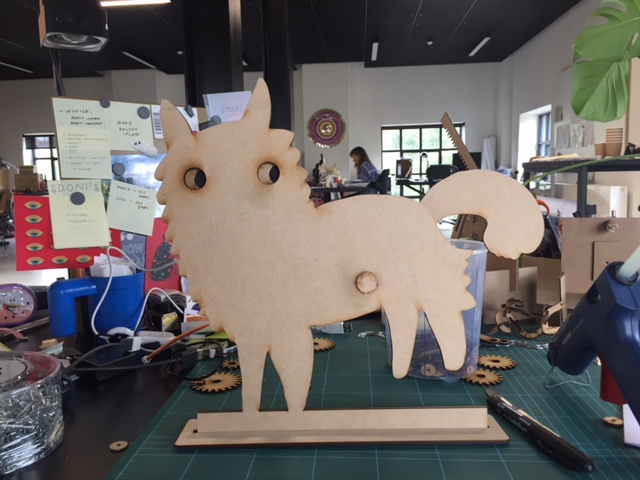
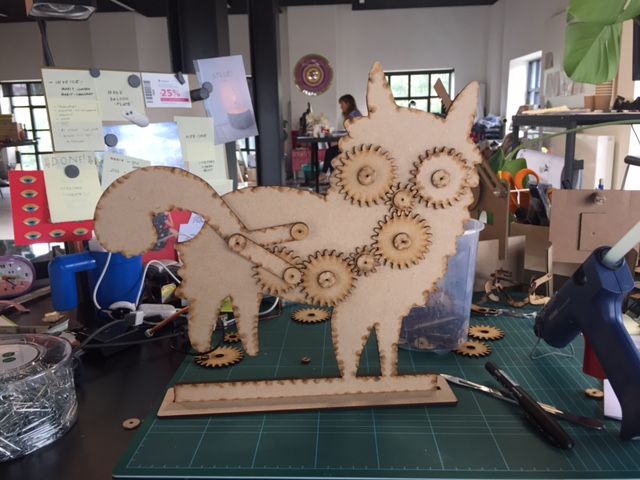
I started with making the first dog. I tested the gears and general scale but I decided I don't like it and I would like to find something more visually appealing.
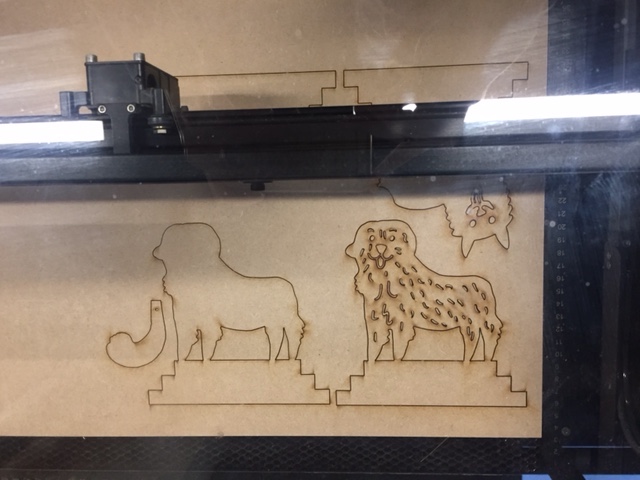
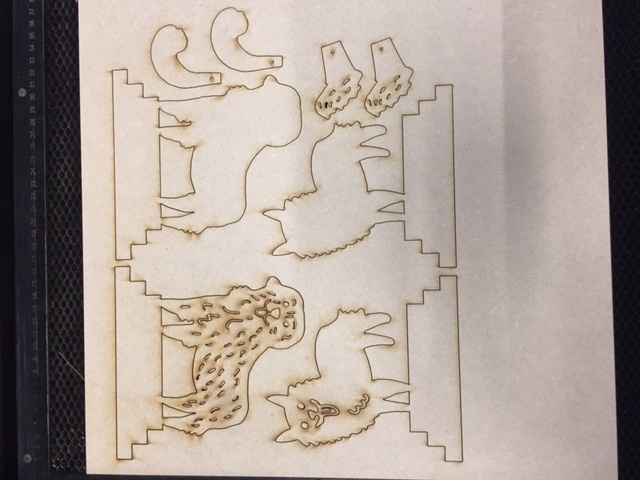

This were the first dogs laser cut in small scale in mdf to test the design.



Here I tested the finnish by spraying mdf. Eventually I decided not to use mdf for two reasons. The gears were working better in acrylic and I wanted to show the mechanism behind a transparent layer. Initially the sculpture was supposed to be bigger and cut on a cnc machine with ingraving.
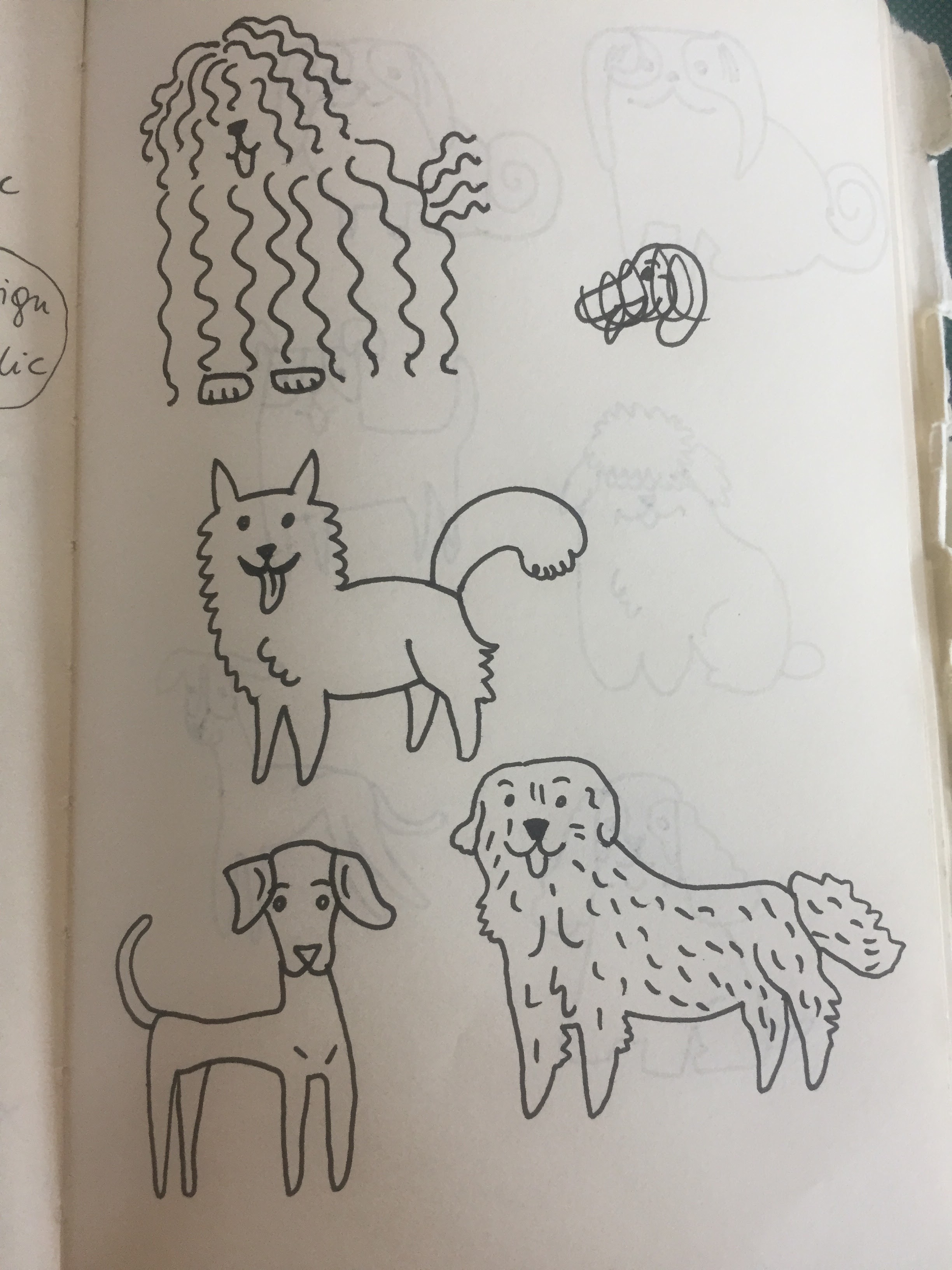
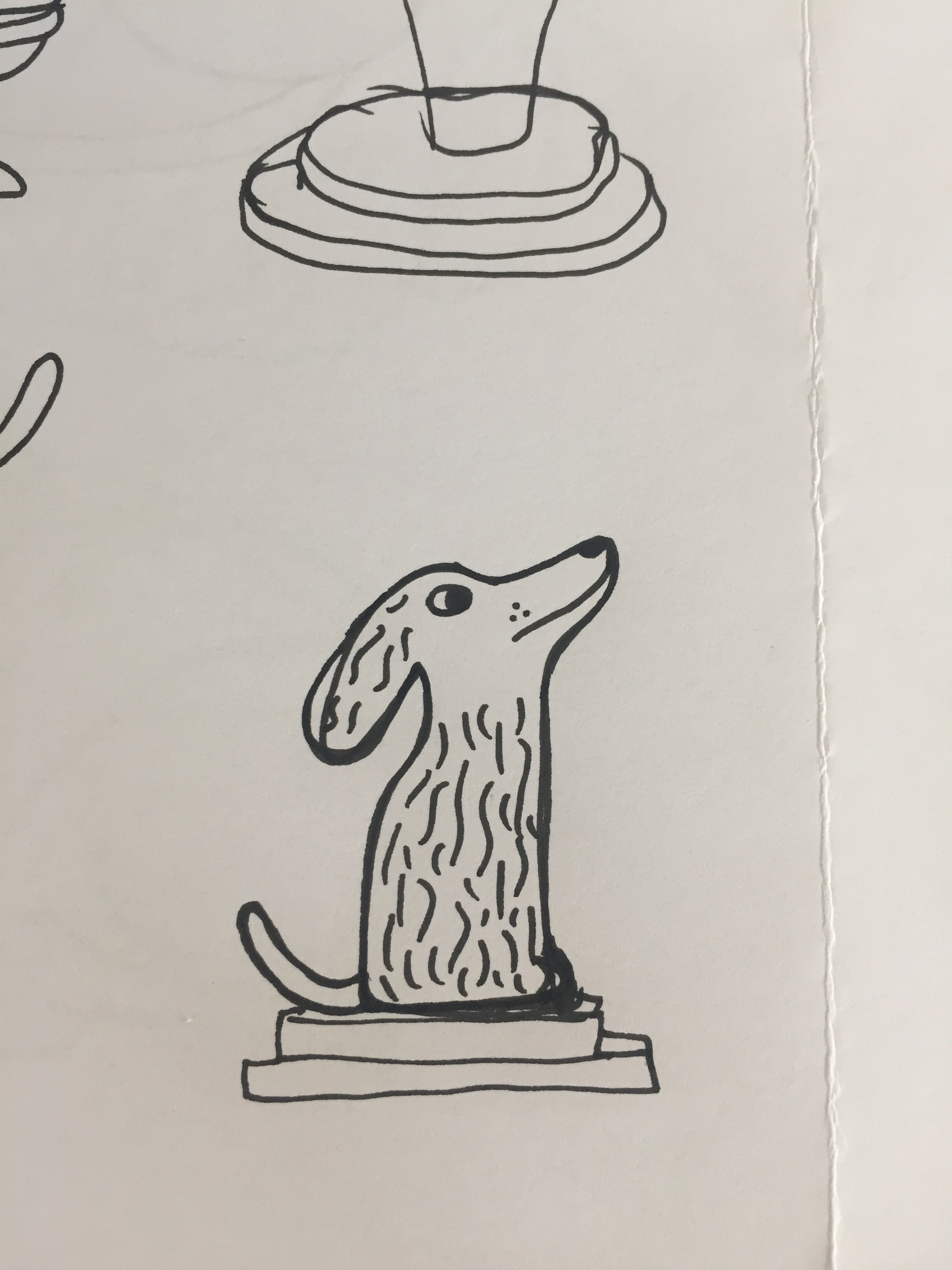
SKETCHING
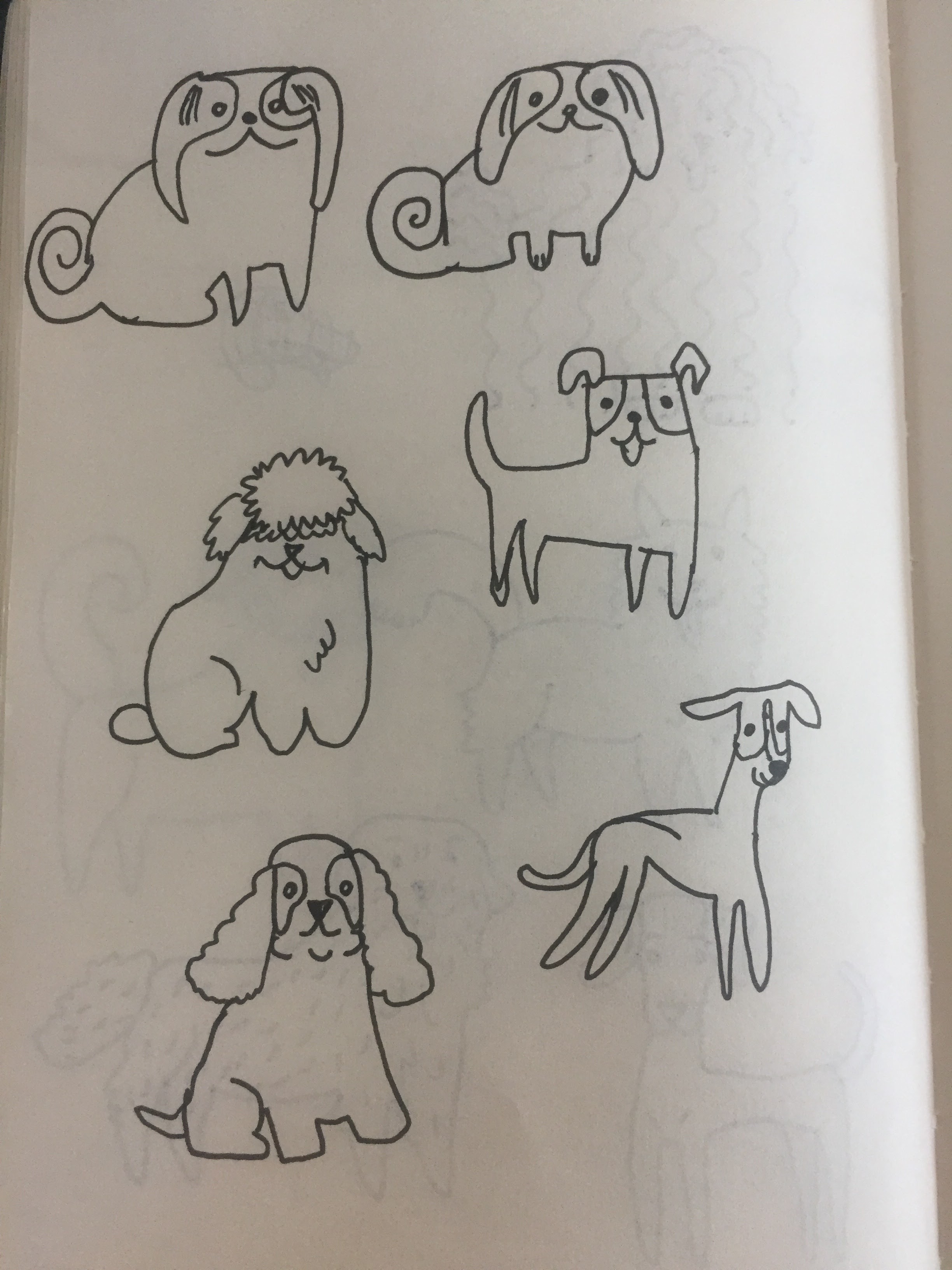
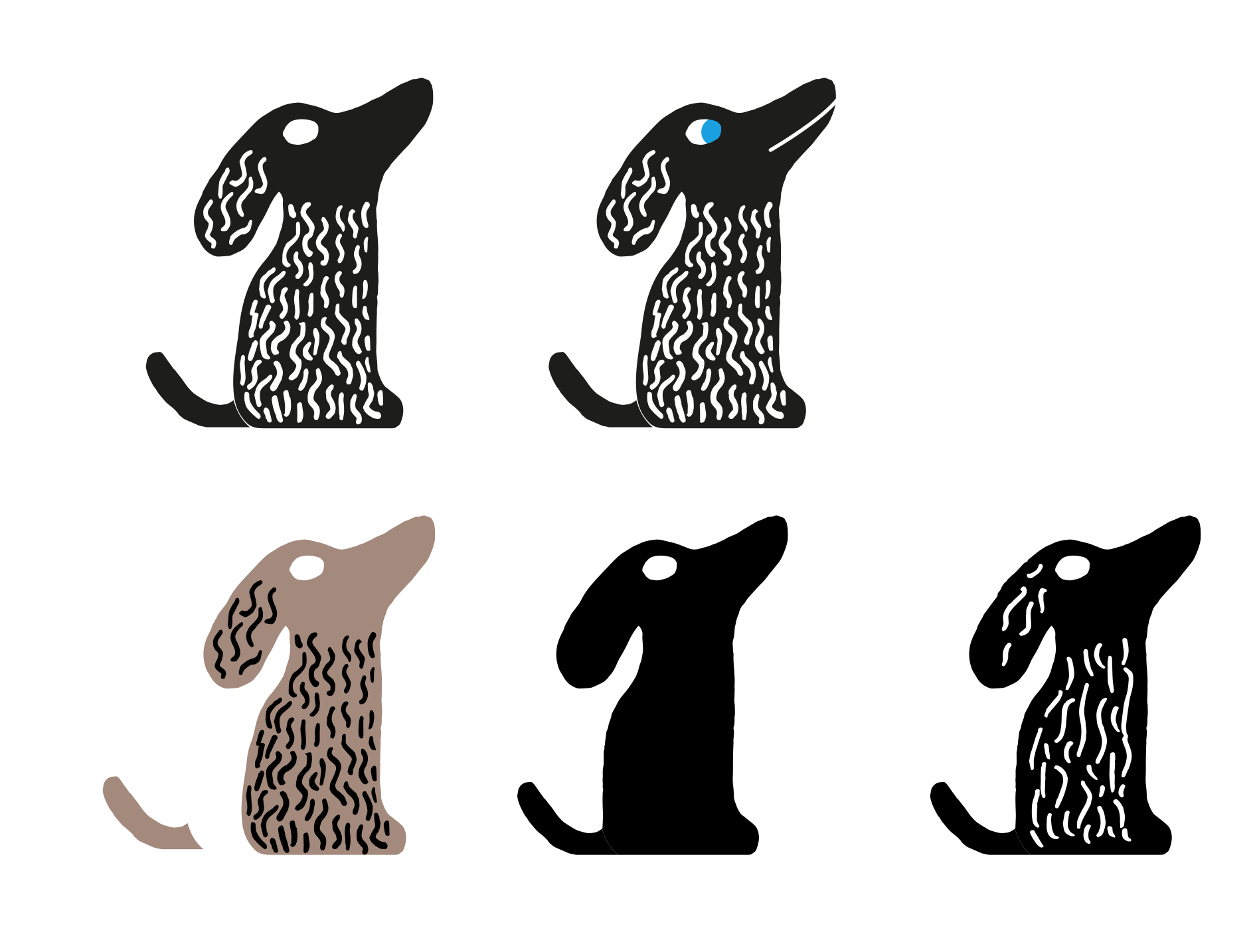
Once the movement was more or less done I decided to work on a final shape of the dog. I made a lot of sketches of different types of dogs. This was a hard decision as I knew that once I pick one of them it will determine the final look of the project.

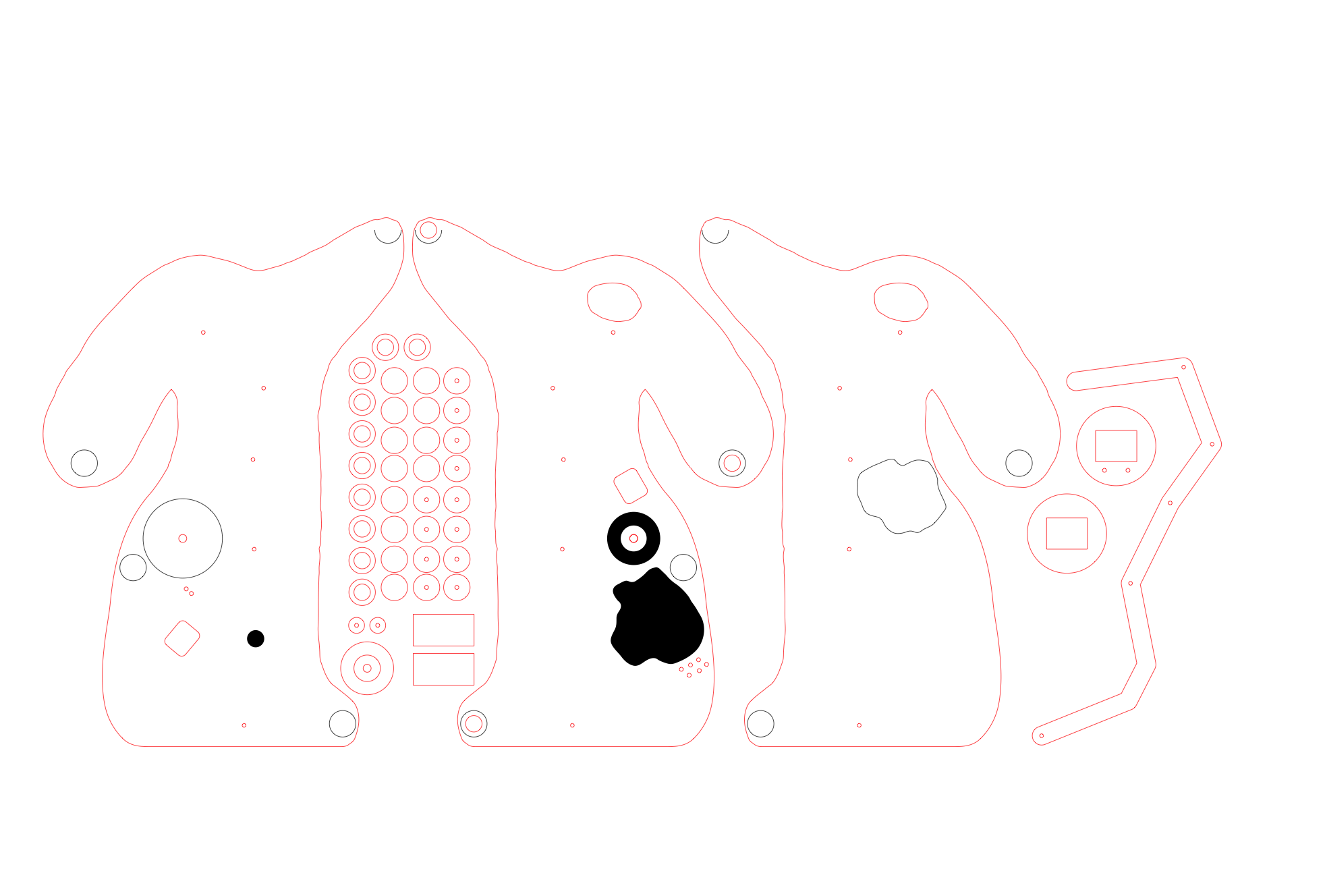
ADOBE ILLUSTRATOR
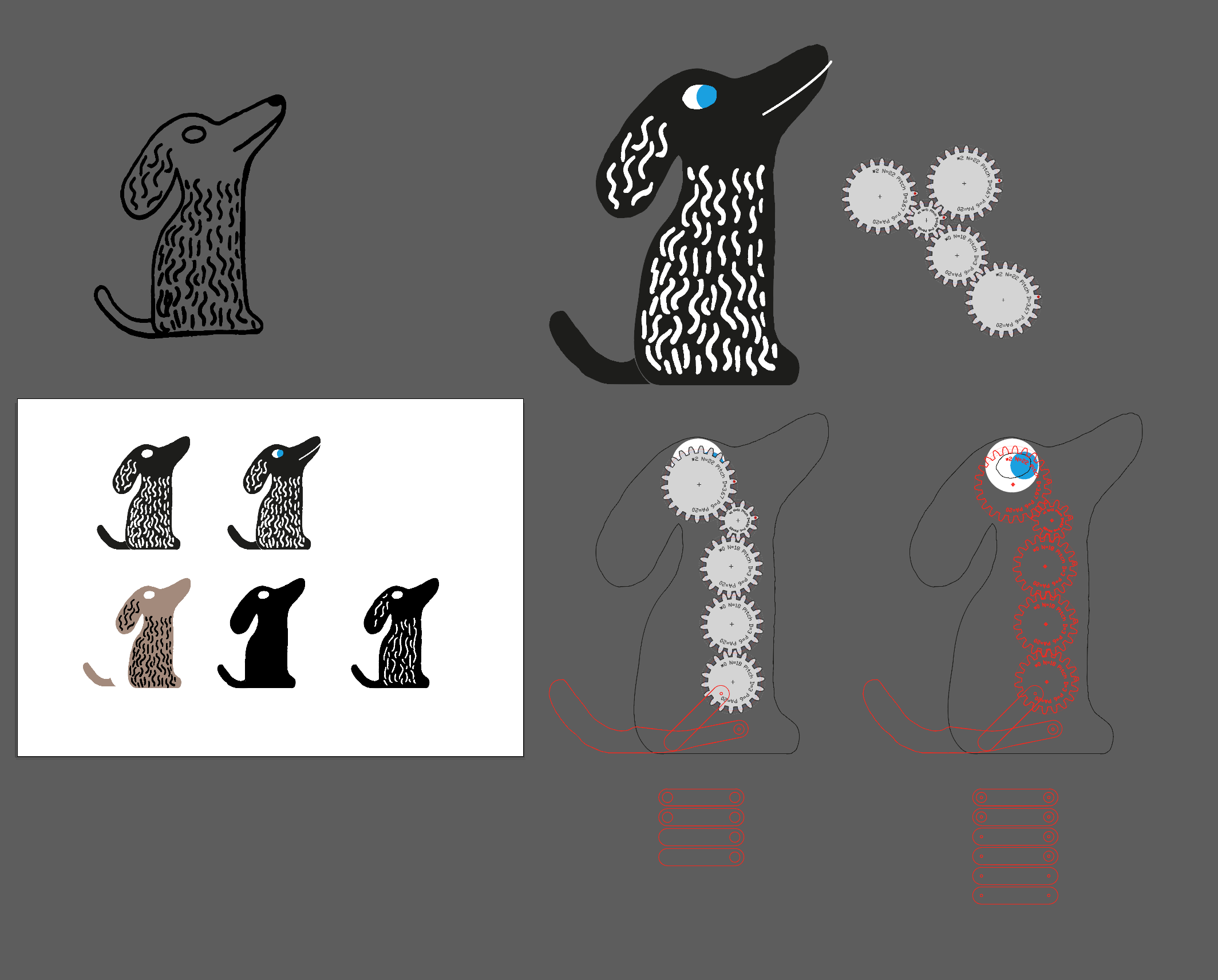
Once the sketches were done I chose one I liked the most and decided to go for it. I imported the drawing to Adobe Illustrator and started edditing it into a blueprint for the laser cutter. It would have been probably faster and smarter to use a 3D program for designing it but because I'm very skilled in Illustrator I decided to use this program. In the future I would like to improve my skills in Fusion 360 or Rhino and be able to work directly in 3D.
/
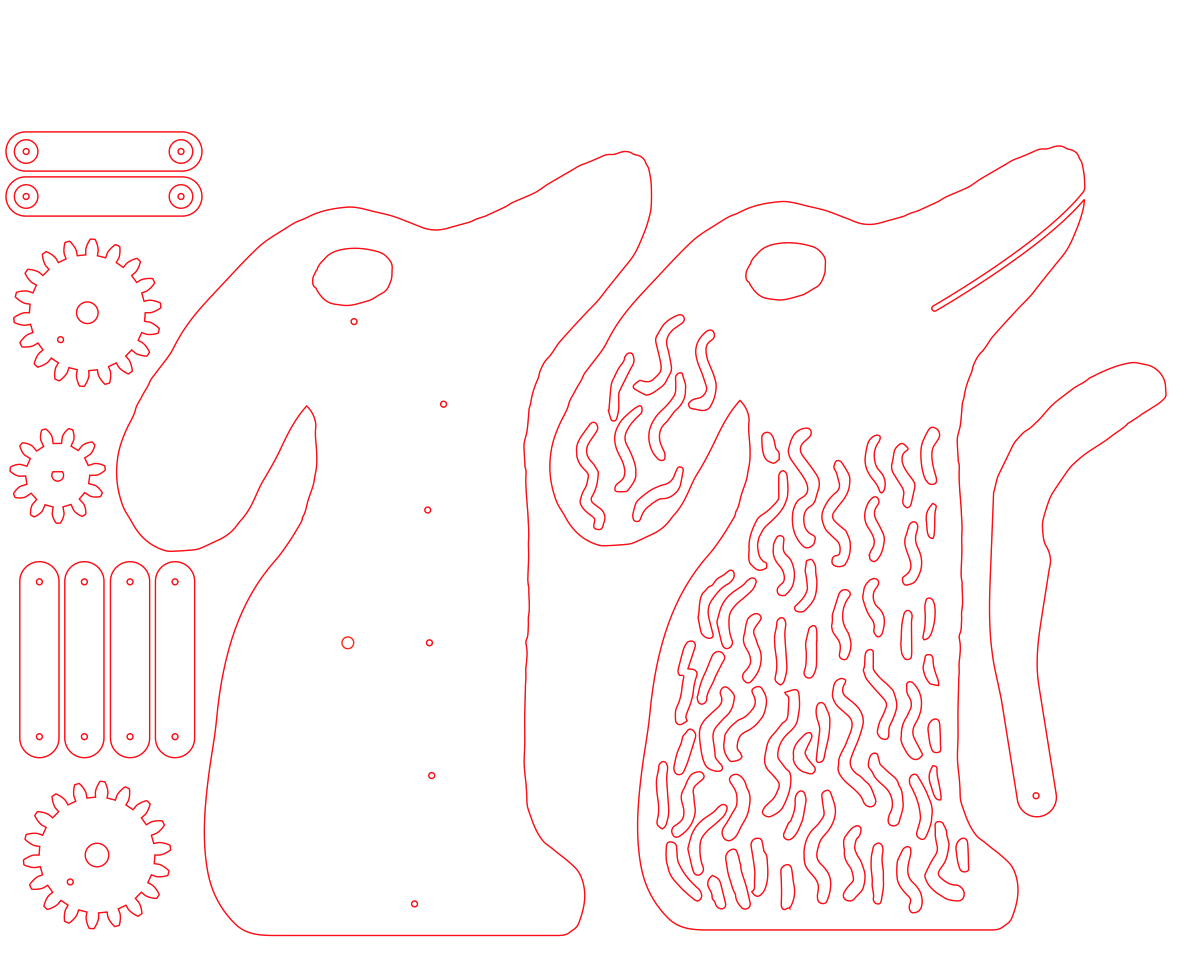
GEARS
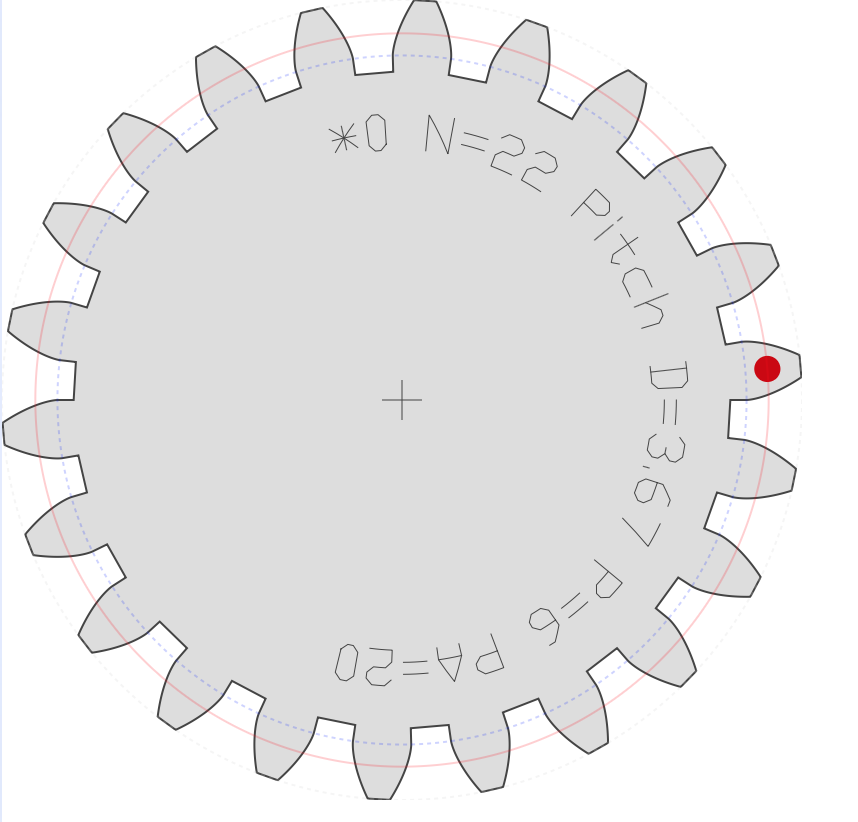
For generating the gears I used very nice online tool called GEAR GENERATOR. It allowes you to design gears and export them directly to .svg format. From there you can import them as a vector graphics to any vector or cad program. I have imported my gears to Illustrator and scaled them manually to the scale fitting my dog sculpture.

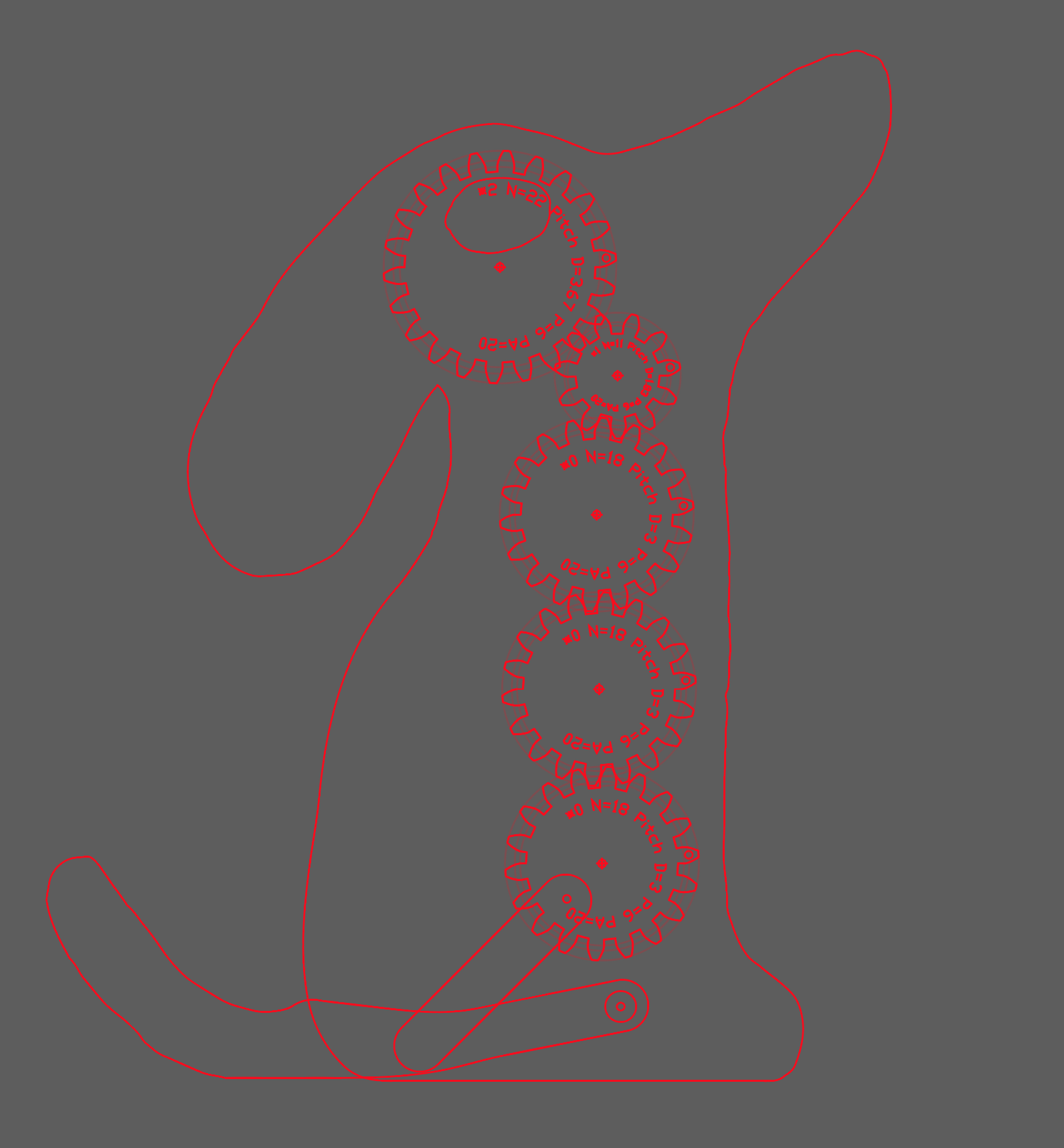
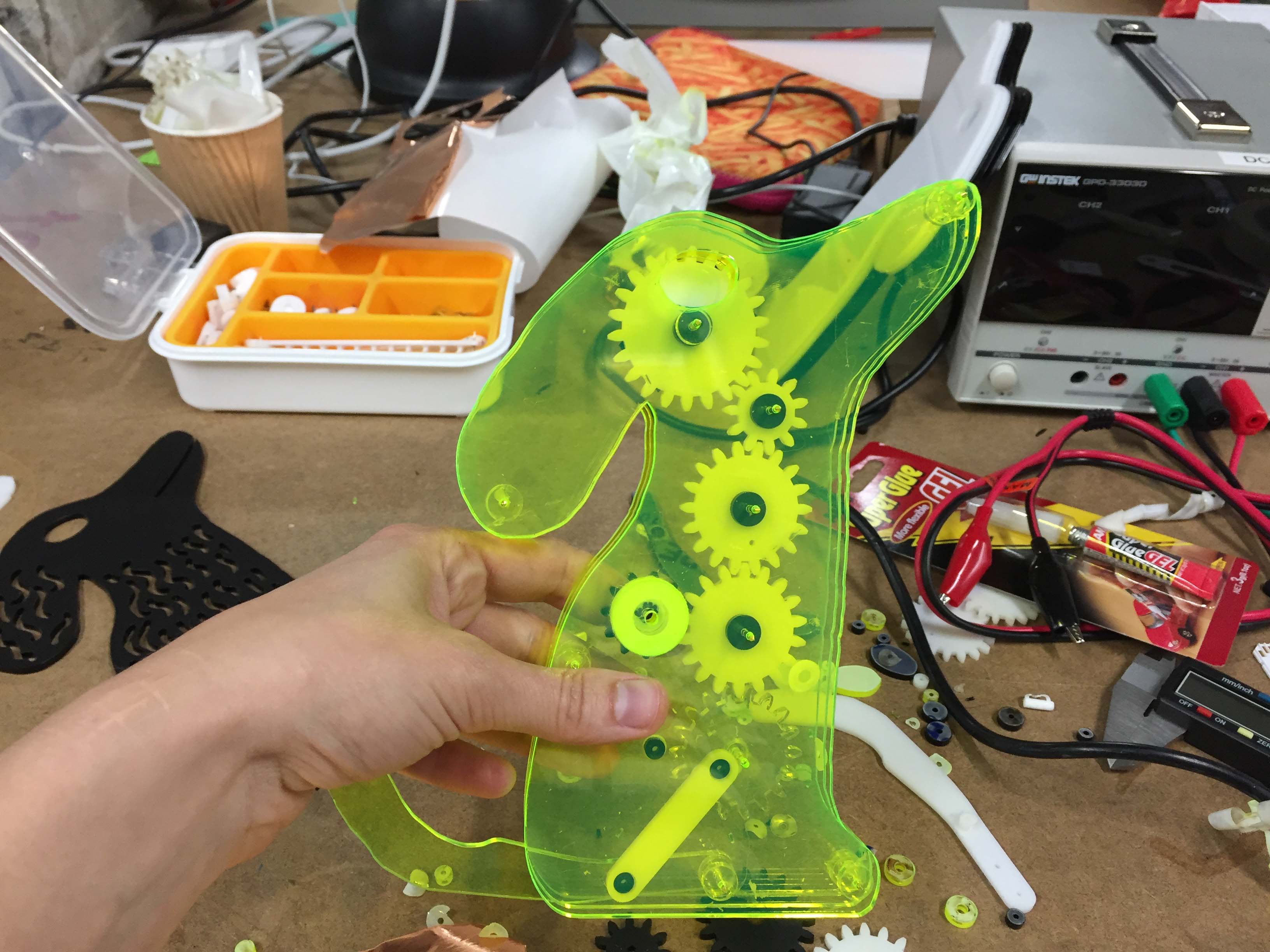
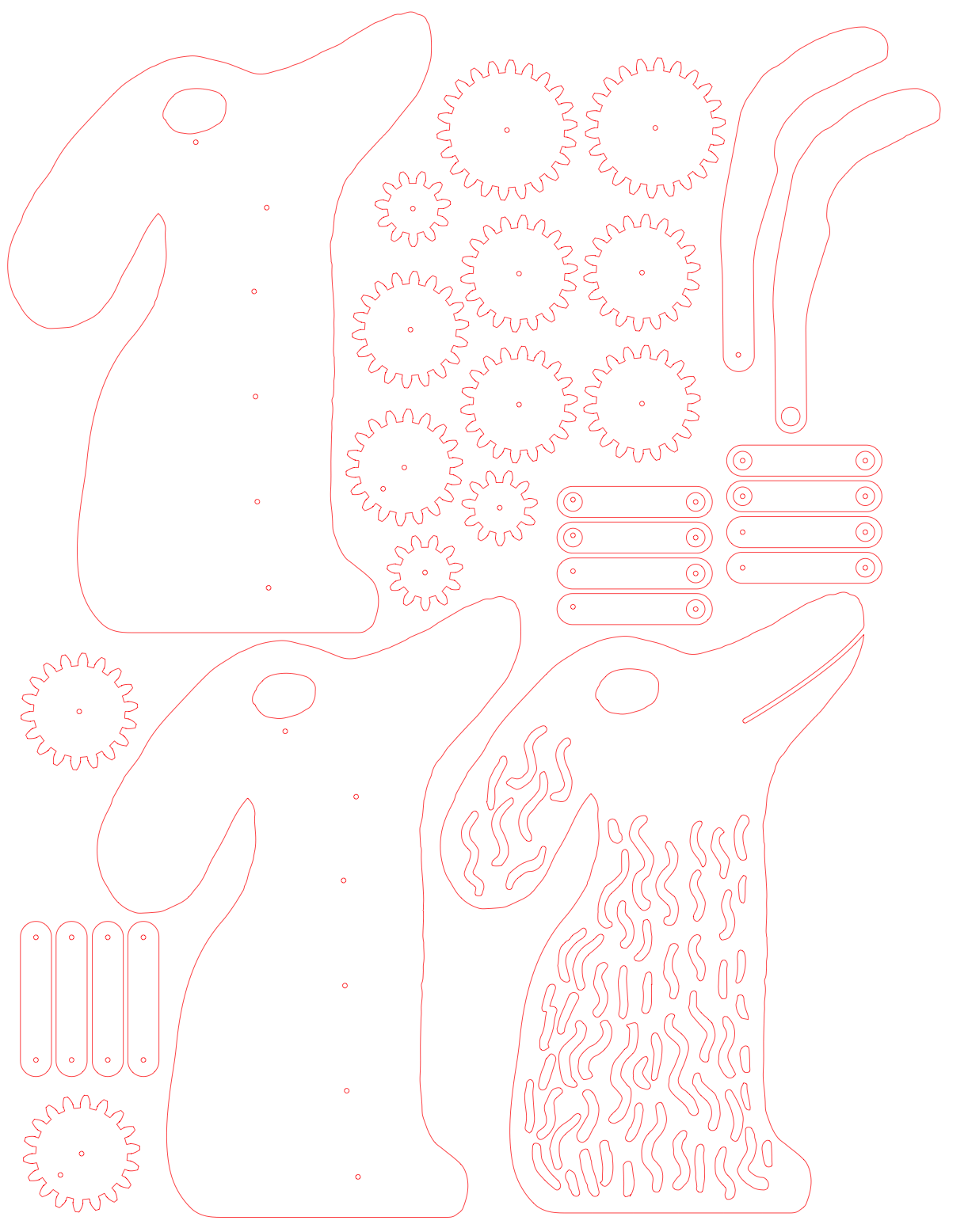
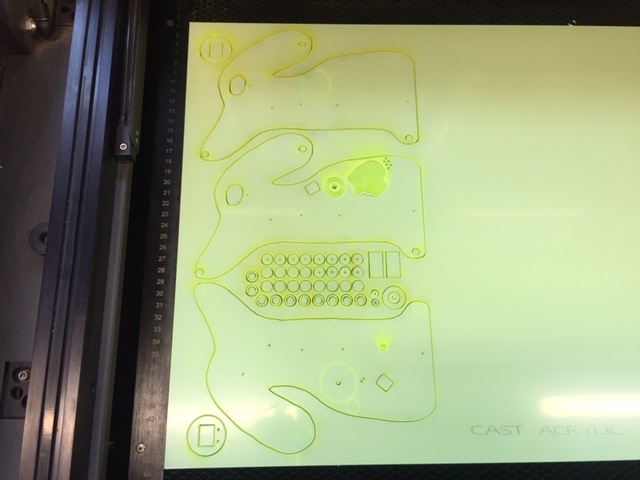
BODY
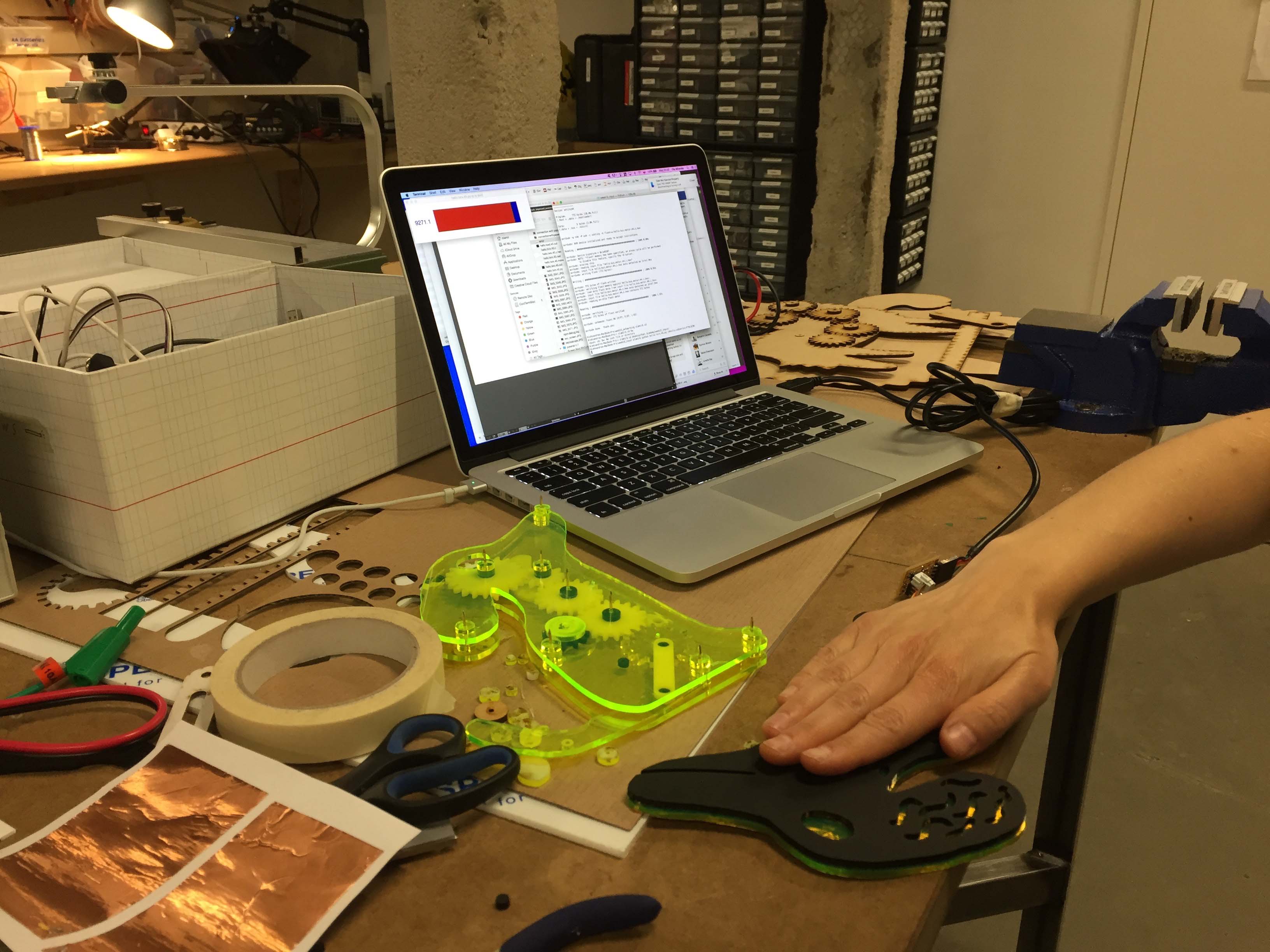
All the dog body elements were cut on a laser cutter from cast acrylic sheet. I wanted the gears to be visible so I used transparent yellow for most of the elements and matt black acrylic for the front pannel.






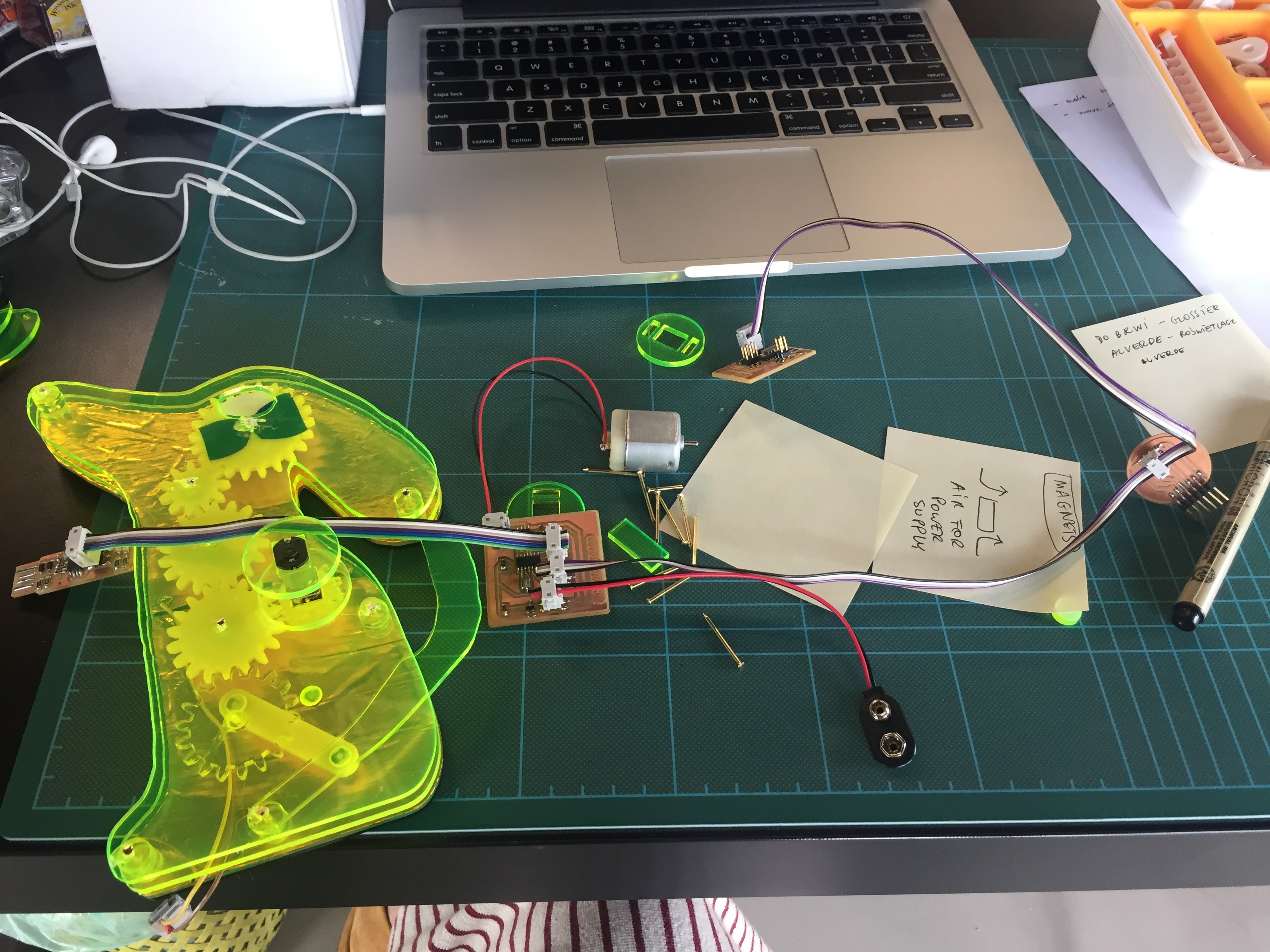
ASSEMBLY
The dog is made from two parts - the mechanical part and the sensor part. Both parts are connected together with magnets. It is possible to easily take them apart and reprogram. I left holes for the 6 pin connectors for the programmer to be connected to both boards. This way the design is flexible and open for improvements. I have also incorporated all the cables in a neat way.





ELECTRONICS
I developed the electronics during the previous weeks of Fab Academy. On my OUTPUT WEEK I made a DC motor board and on the INPUT WEEK I created the capacitive sensor board. On the NETWORKING week I decided to combine those two on a bus adding a bridge board. You can see the documemntation on previous weeks. Later on I adapted them to the dog unfortunately making few mistakes.
DC MOTOR BOARD
INTERRUPT
The board I designed on the OUTPUT WEEK had wrong pins connected to timer. I tried to fix that with the code but It was not working so I had to redesign the board again and swap the pins to the correct ones.

DC MOTOR

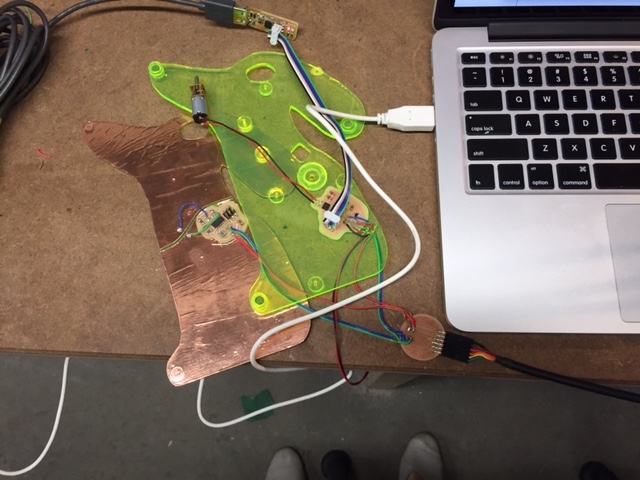
Finally I found a very nice small motor to use in my project. It is a 6v mini dc micro metal gear motor uses usually for electronic locks. It is geared down and it is more powerful than a simple DC motor I was working with before.
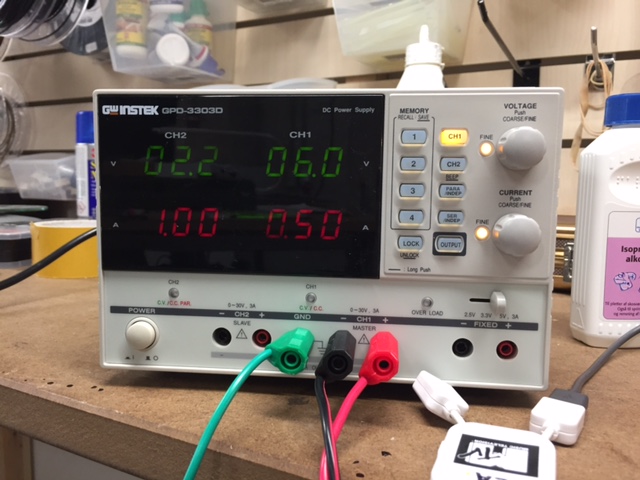
The only problem with the 6V motor was that the voltage was not enough for the motor driver. The motor driver needs 8V+ to run the motor. So I forced my motor to run on 9V and it is working so far. I have to but a new 12V motor for the next version. The only disadvantage of this motor is that it makes a bit of noise. I would like to also improve that in the future by looking into using a brushless motor.
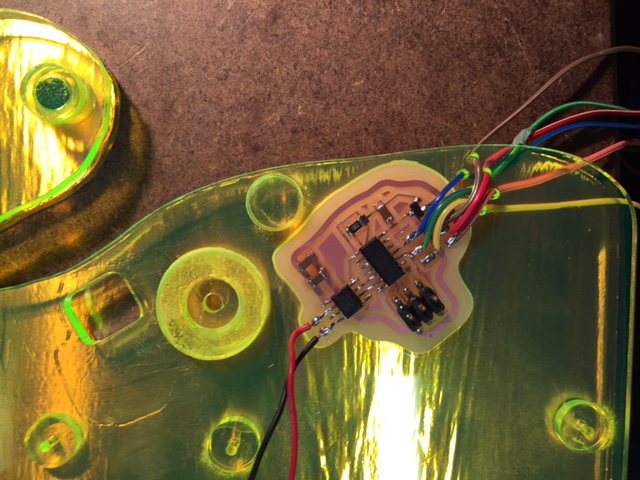
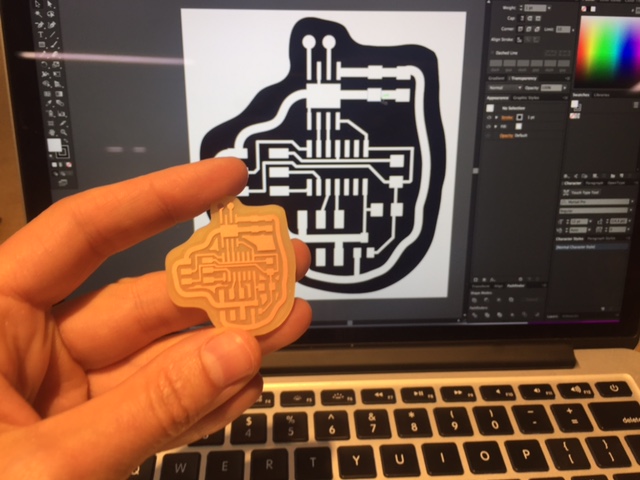
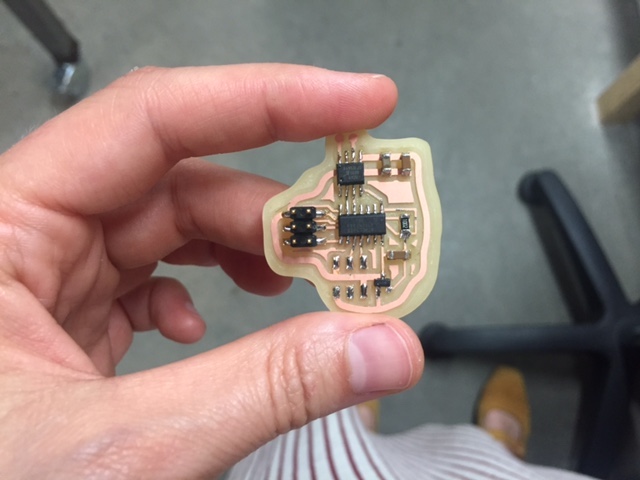
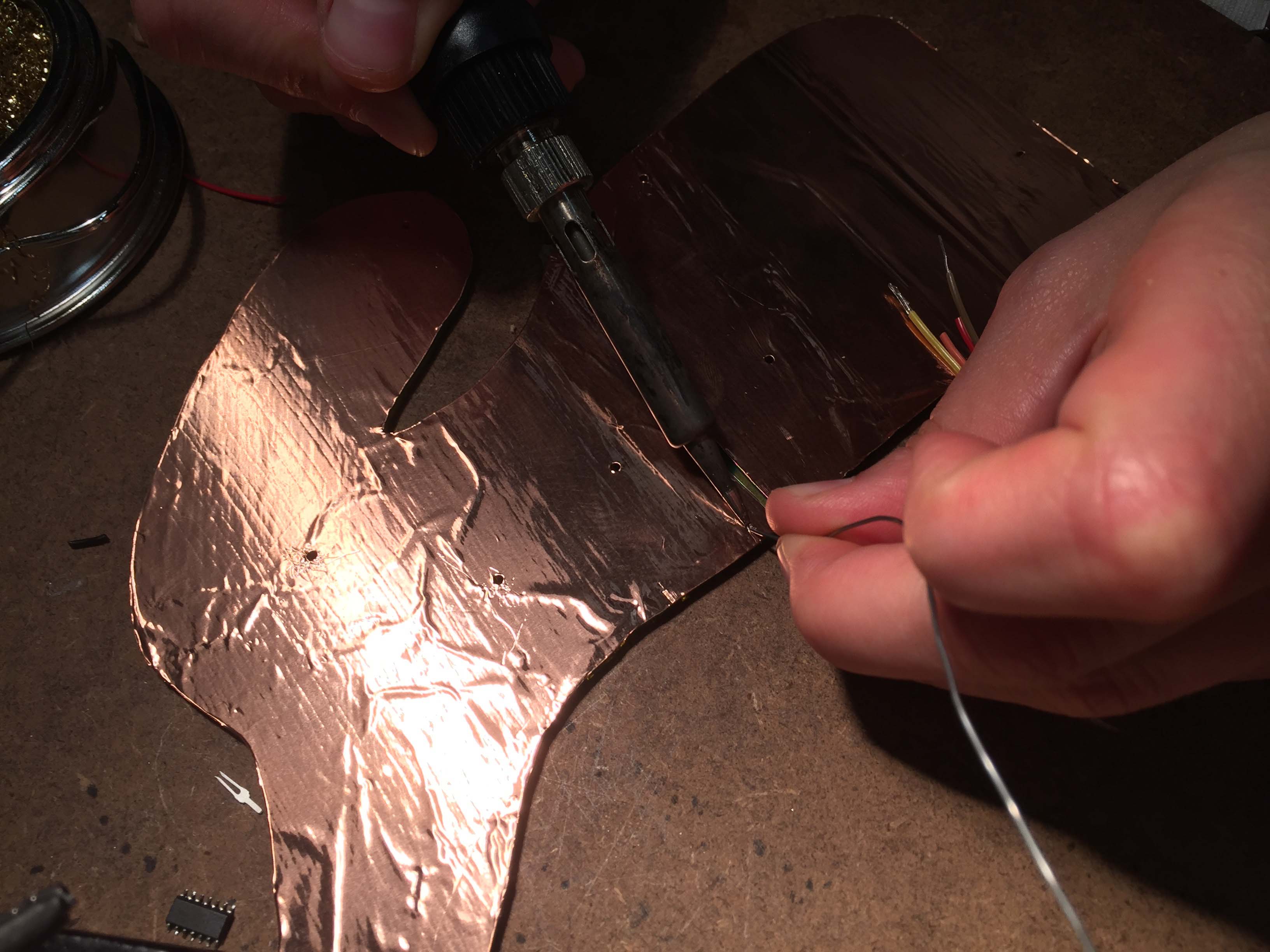
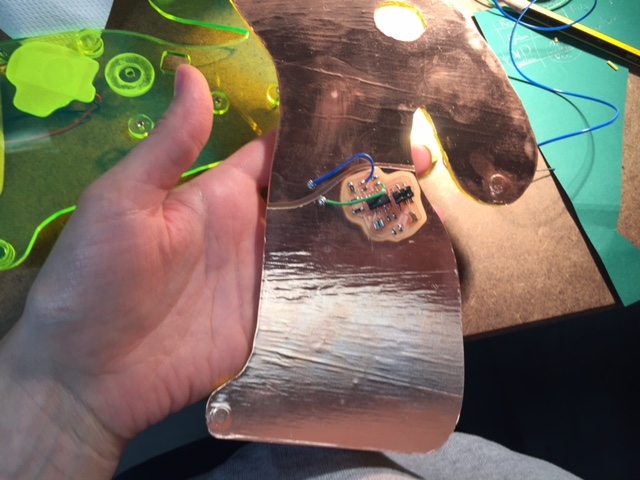
CAPACITIVE SENSOR
The sensor is made from adhisive copper foil. The first test (to see if the material is thin enough) I made with the old - non network - board. It worked fine so I proceeded to stick the foil inside the panels of the dog. It was satisfyingly sucessful.


NETWORKING
Networking is documented under the NETWORKING WEEK.
INTERFACE
Programming the interface is documented under the INTERFACE WEEK.
TIMING FOR NEXT STEPS
I would like to finnish the improve prototype by the end of July to be able to bring it with me to Chile. The dog has to be done by 28 July. I will mostly have time to work on it next week 3-7 July 2017. After that I need some holidays!
REMAINING TASKS
- Make the plinth for the dog - SHOPBOT
- Integrate power supply
- Fix the motor board
- Program one of the boards to be master so it can work without the computer
- Polish the details in the dog's body
- Layout the laser files in an efficent way and update them on the website
- Find a better solution for the nails holding the gears
WHAT CAN BE IMPROVED
There is few things in the project that could be improved in the future:
- Find better motor - 12 V brushless motor - to make less noise
- Try different materials
- Try different scale (make it bigger)
- I would like to make more sculptures like this, with different sensors activating motion
- Design a fountain based on the same principles
WHAT HAS WORKED, WHAT HASN'T, WHAT HAS TO BE RESOLVED?
I think most of the stuff worked fine, all the things that can be resolved I included in the REMAINING TASKS and WHAT CAN BE IMRPOVED parts. The biggest improvement would be to find a motor that is less noisy.
LEARNING OUTCOMES
Overall I have learned a lot! I really enjoyed the spiral development of my design and the whole process. It was very helpful to already start working on the input and output boards for the final project in the previus weeks. This way I was able to see more connection between all the Fab Academy tasks.
I learned how to document my work and how important it is to do it while I work and how beneficial that will be in the future.
Things that I would still like to get better at is programming interfaces and writing the code. I feel like there is a lot more there to learn for me. I would also like to get better at 3D modeling. I think all of this is doable now - since I have a solid background in completing all the tasks from Fab Academy.
