FINAL PROJECT
I have three ideas about my final poject, two of them are gravity drived car, the other is a take phote machine.
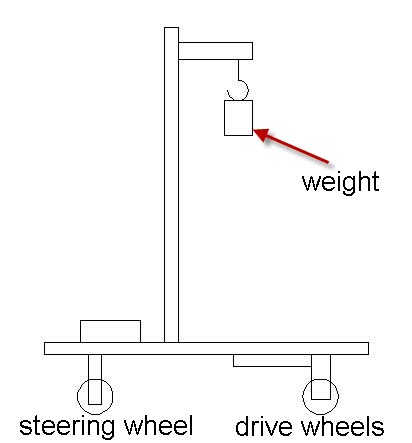
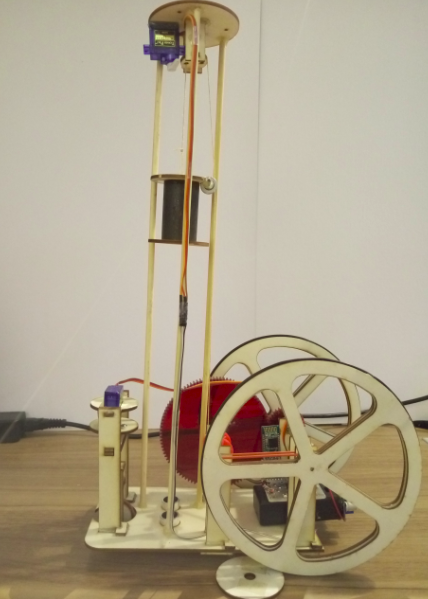
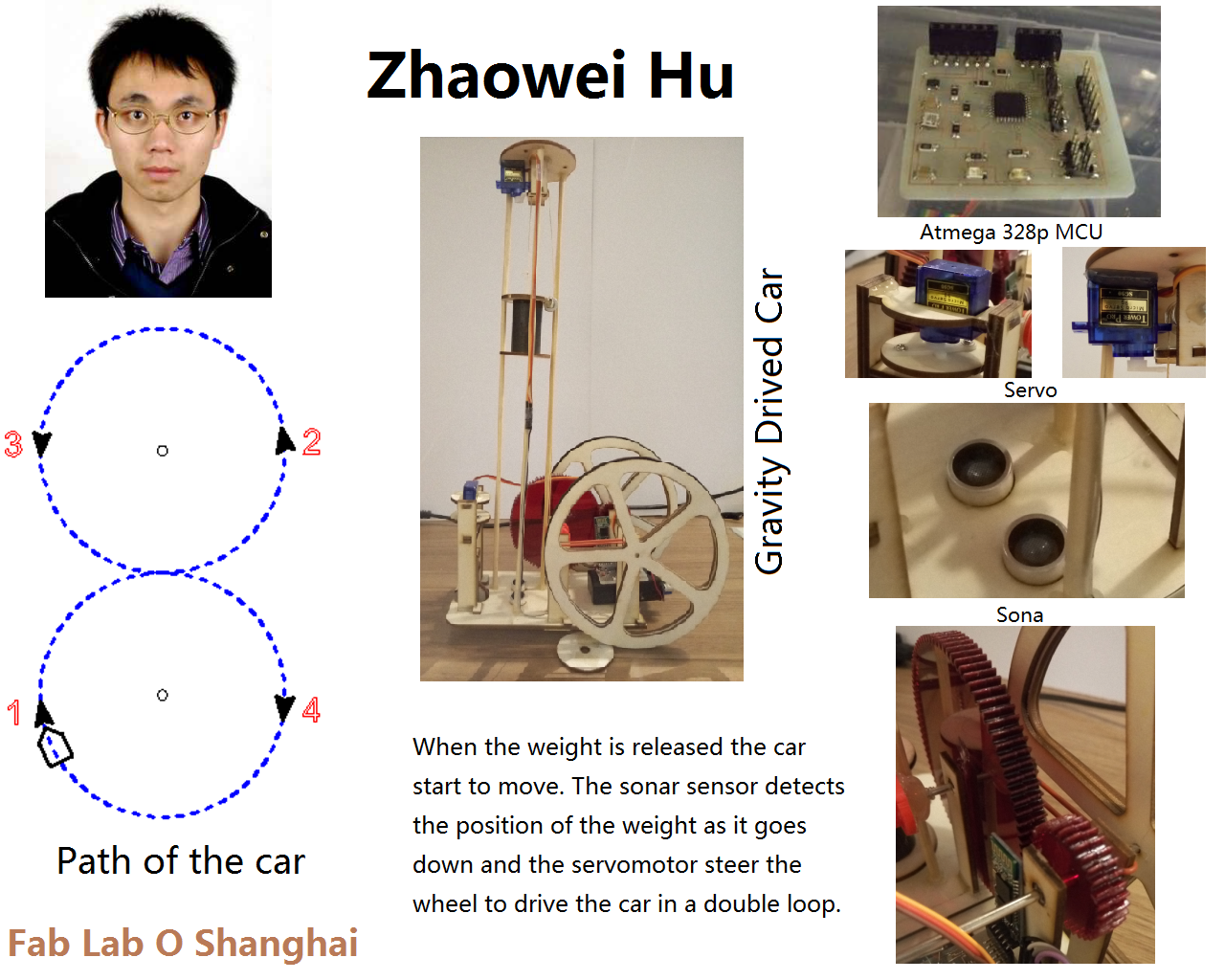
- The car is drived by gravity, the weight is hang on the car, then the weight down by gravity, the gravity tranfer to kinetic. The car is show on the picture below.
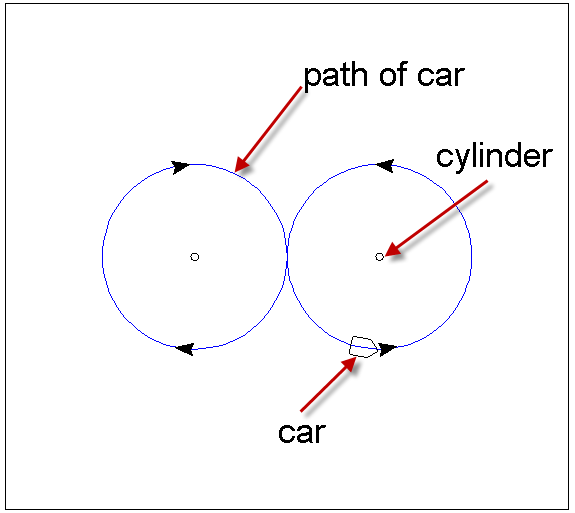
- The car go 8 circle on the table or ground, the path is show in the picture.
-
It has 5 characteristics:
(1) Drived by gravity, the steering wheel also drived by gravity;
(2) A 8 circle path, the 8 can be big and small;
(3) It can show how long the car goes and the velocity of car;
(4) It can show the mass of object;
(5) It can caculate the efficieny of gravity transfer to kinetic;
Some sensors need to get the velocity distance and LCD is need to show the data. A doubt is the microcontroller can caculate the efficiecny.
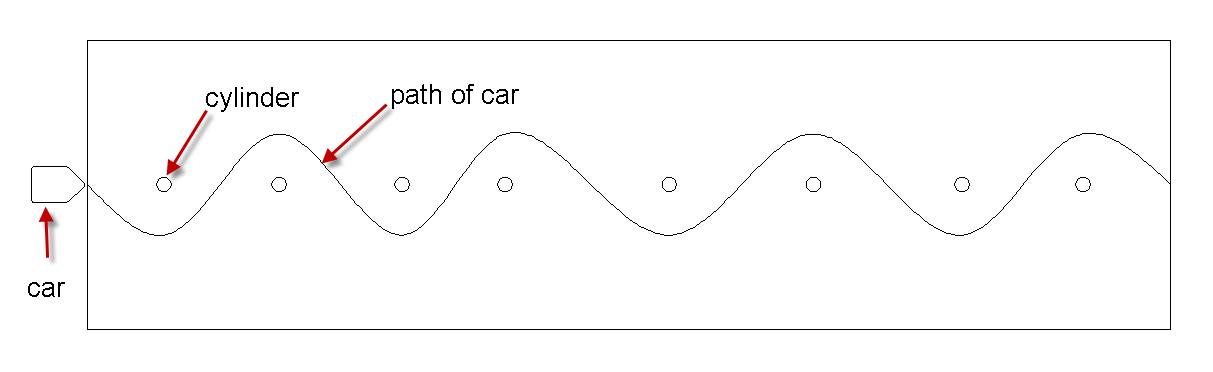
- The car also drived by gravity but it can avoid obstalce. The cylinder obstalce in on the stright line but different distance, the car can turn round, the path is show in the picture. Some sensor need to recognize the obstacle, the steering wheel is dived by a servo.
-
It has 6 characteristics:
(1) Drived by gravity, the steering wheel drived by servo;
(2) A S path;
(3) The car can recognize the obstalce;
(4) It can show how long the car goes and the velocity of car;
(5) It can show the mass of object;
(6) It can caculate the efficieny of gravity transfer to kinetic;
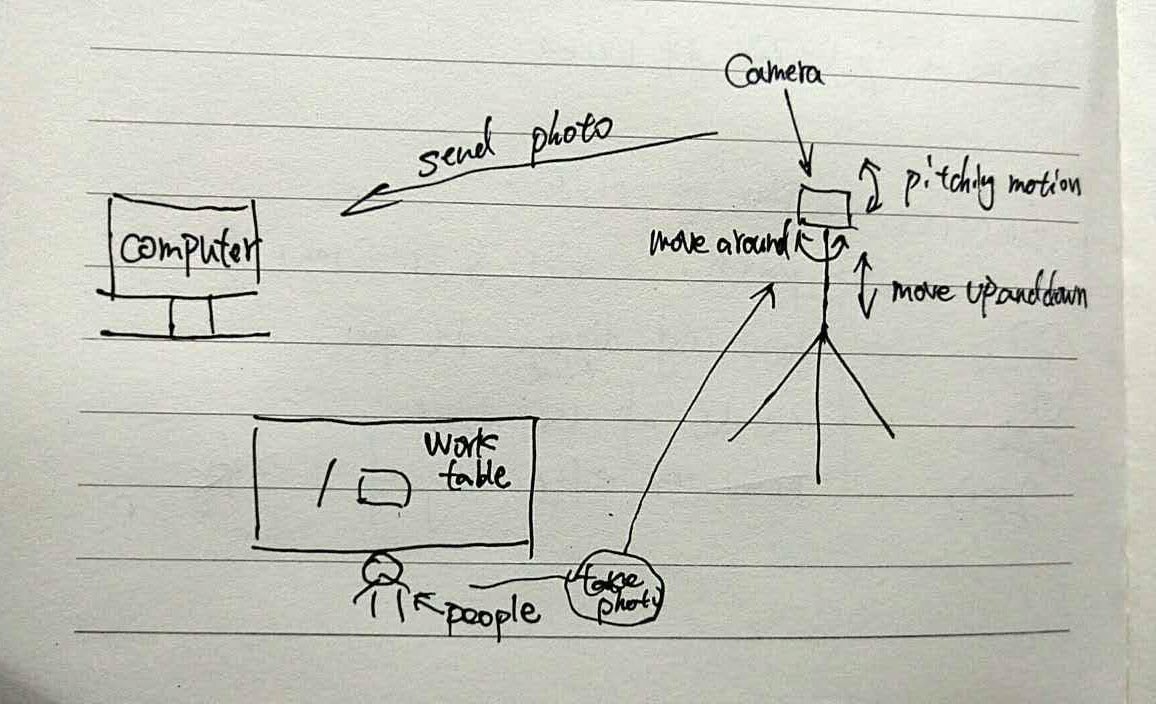
- This machine can take photos and send them to computer. It can be controlled by voice or touched by foot. When you work on the table and you need a working photo, then you tell the camera you need a photo, you can see the image on line on the computer. The position of camera is controlled by motors, tell the camera un or down rotate until the image on the computer is you want. Tell the camera "take photo" after adjust the position of the camera. The camera gets the message it will take photo and send it to computer.
-
It has 3 characteristics:
(1) Take a photo by voice or foot touch;
(2) Send the photo to computer;
(3) The camer can auto focus;
(4) The movement of camera can controlled by voice;
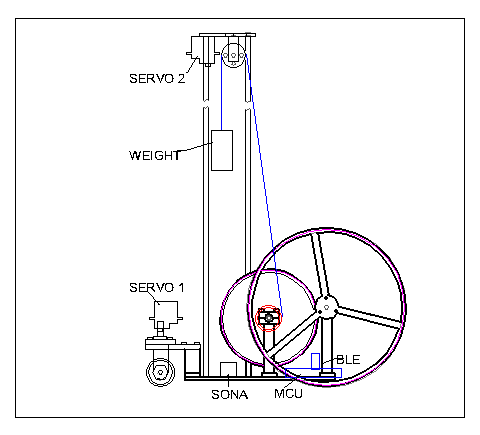
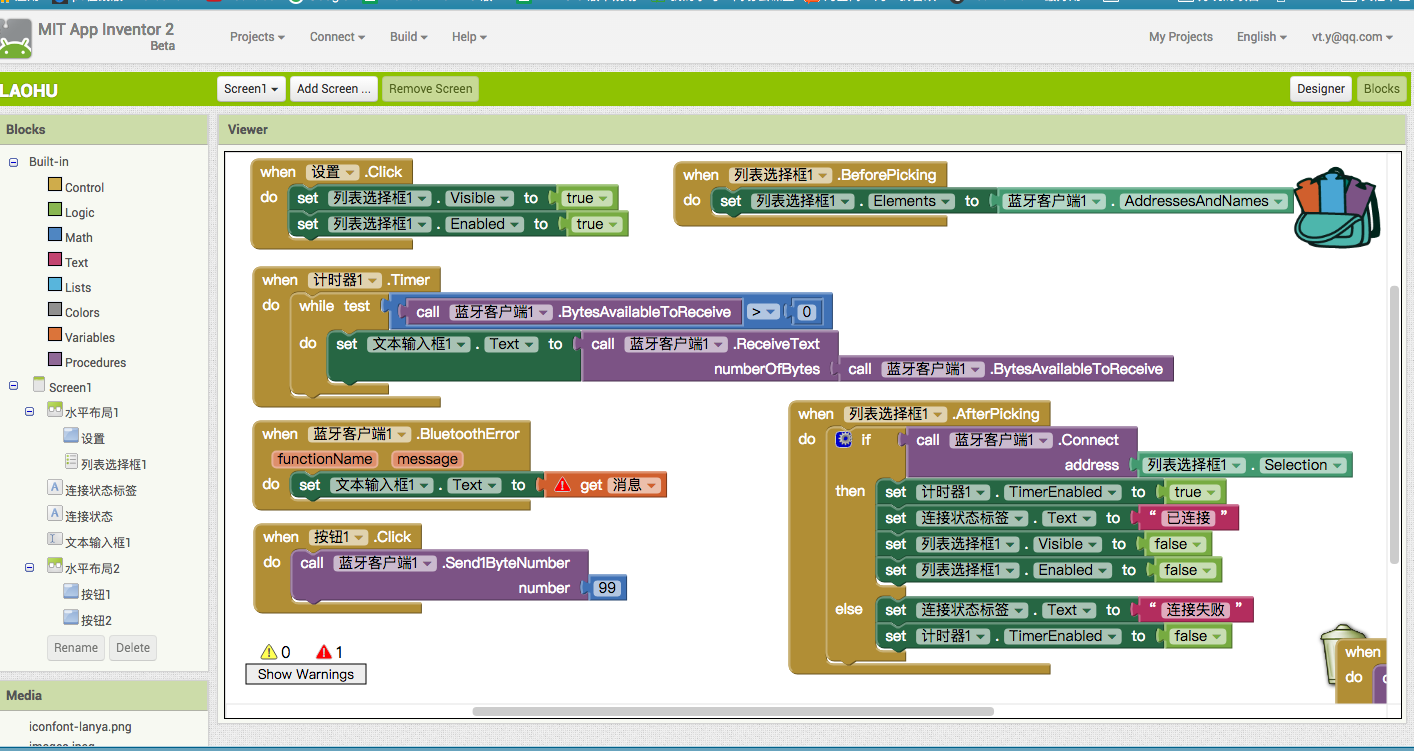
At last I make a gravity drived car, some differences from idea1 and idea2. The car still drived by the weight (power of gravity). The steering is als controlled by servo, but the servo is controlled by the weight descending distance. The car can go stragiht path, S path or 8 path, it detertimined by programming. The system can controlled by phone, they were communicated by BLE, the distance detected by sona can send to MCU and MCU controlled the servo. When I press start on the phone servo 2 will release the weight and the car run as the weight goes down meanwhile the green led will be on. If I press stop on phone servo 2 will clamp the weight then the weight can't go down the car will stop the red led will be on at the same time.
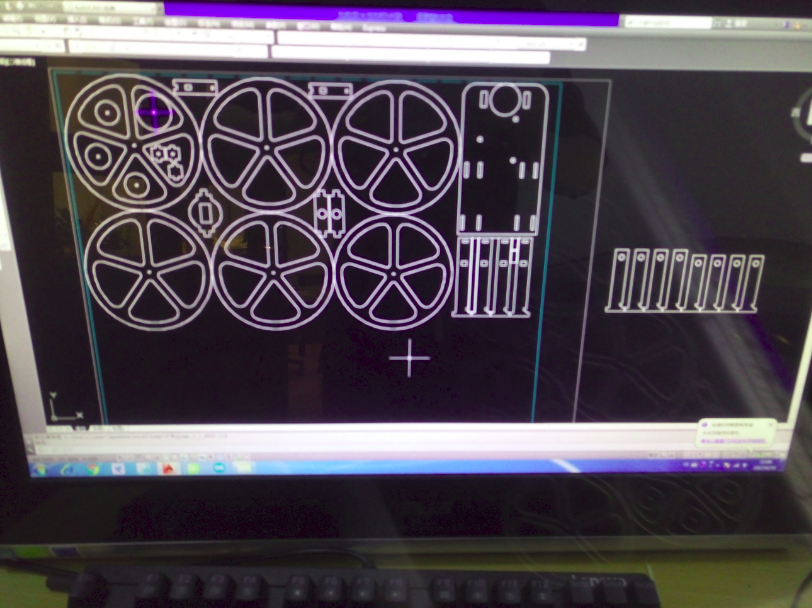
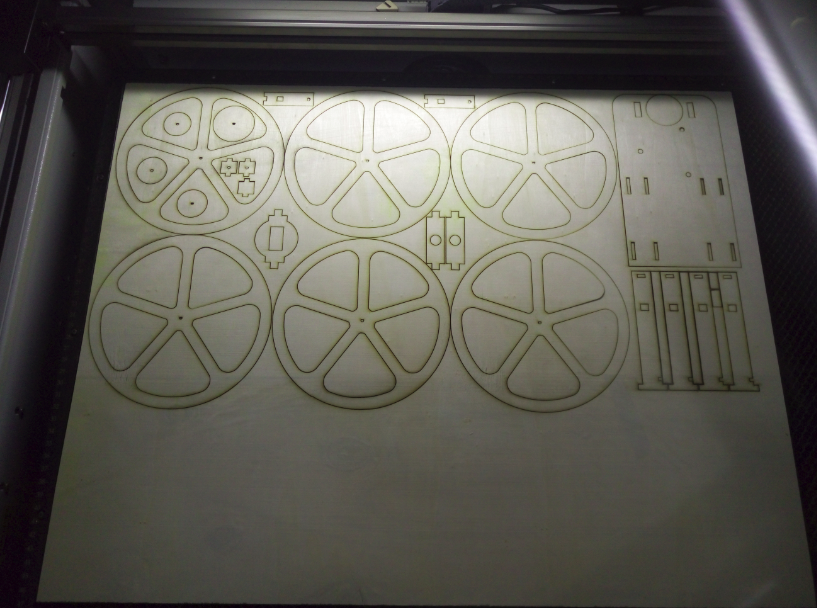
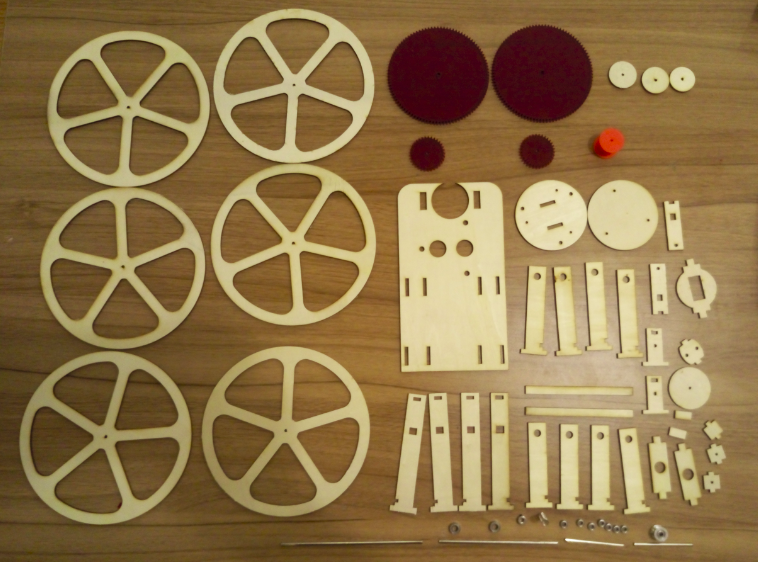
The structural parts were designed by 3D and 2D software, and most of the parts were build by laser cutting and the part winding roll was build by 3D printing.
A 3 mm thickness woodboard was used in laser cutting.
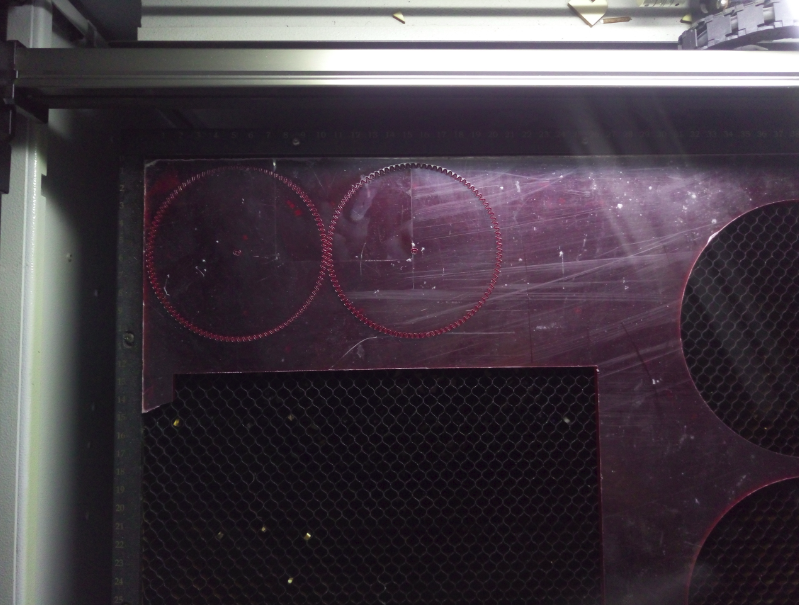
A 5mm thickness acrylic board was used for making gear, for it should be much stronger.
All of the parts were cutted.
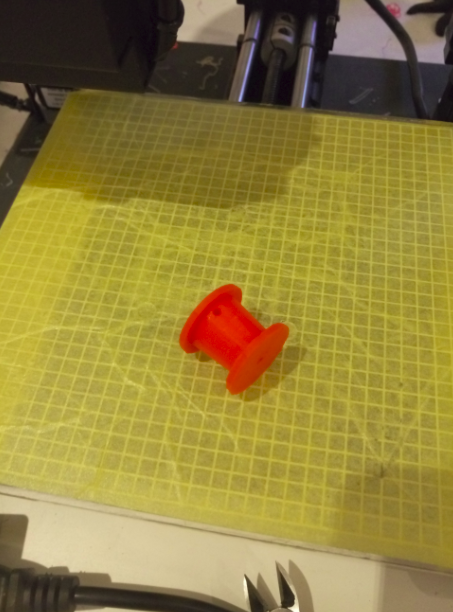
The winding roll was build by 3D printing.
The elecronic designed on Eagle software.
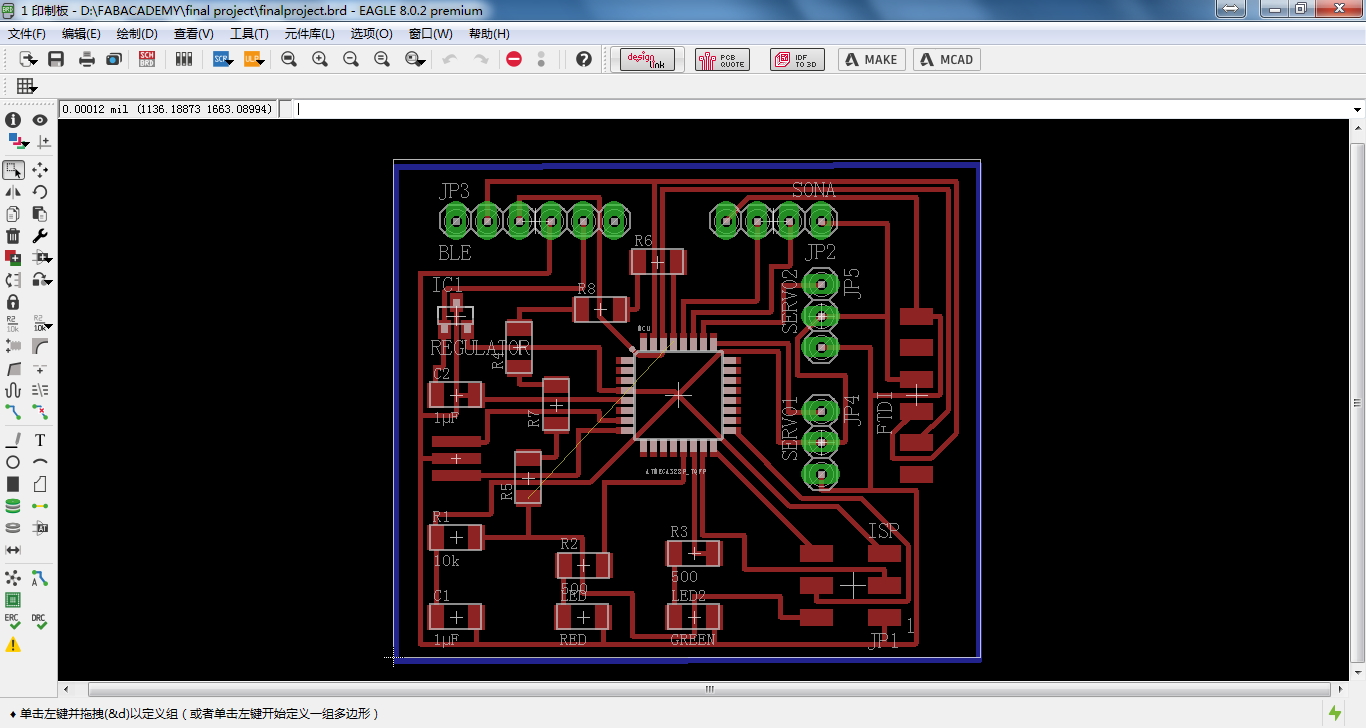
The board was produced after design.
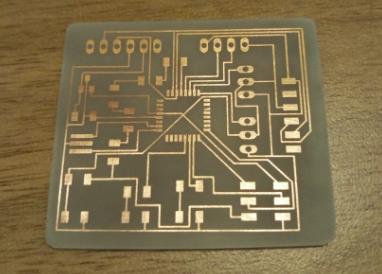
It is not easy to solder, for the MCU chip has many pins.

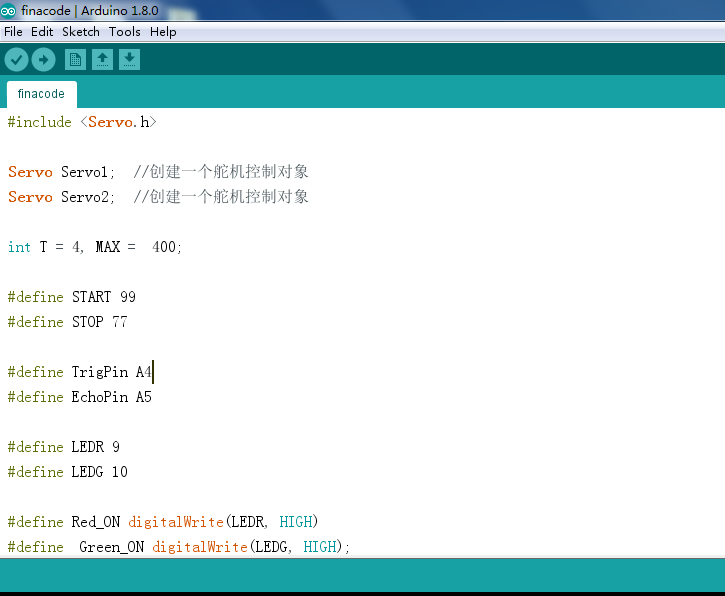
I programmed on arduino, it has some problem when upload for I used a 20 MHz crystal, and I change it to 16 MHz then it worked.
App inventor was used for design a app on phone.
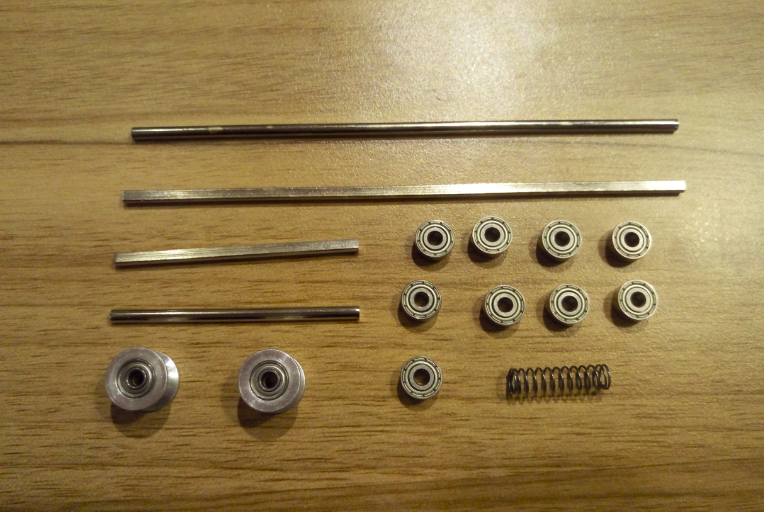
It need a long time to assemble the car.
Shafts bears and spring were need.
The front wheel was assembled.

The back shaft for back wheels and small gear was assmebled.

The front shaft for winding roll and big gear was assembled.

The shafts were assembled on underpan.

Back wheels were assembled.
The support ans pulley on the top were assembled.

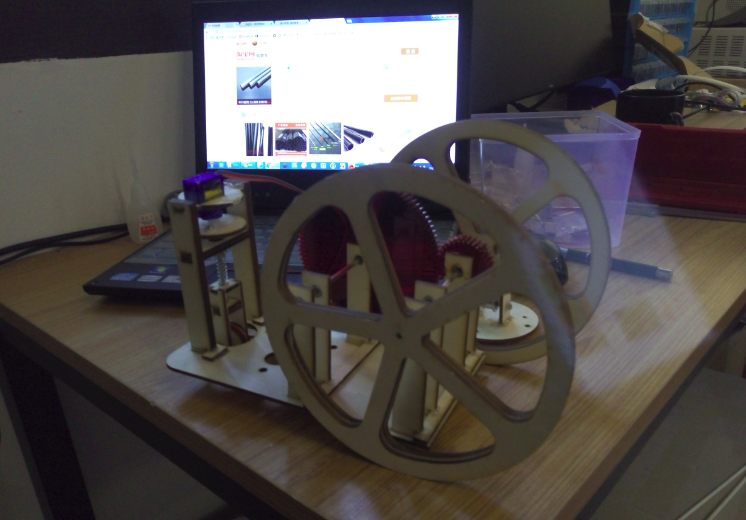
The weight was put on the car, and the electronic elements were assembled.
After assemble all of the parts including the electronic elements, I test it and try to do some adjustments.

Laser Cutting File 3D Printing File Electronic Design MCU Code App of Android