*EIGHTEENTH*WEEK: APPLICATIONS AND IMPLICATIONS
Assignment
1. Assignment:
- what will it do?
- who's done what beforehand?
- what materials and components will be required?
- where will they come from?
- how much will it cost?
- what parts and systems will be made?
- what processes will be used?
- what tasks need to be completed?
- what questions need to be answered?
- what is the schedule?
- how will it be evaluated?
Assignment
WHAT WILL IT DO?:
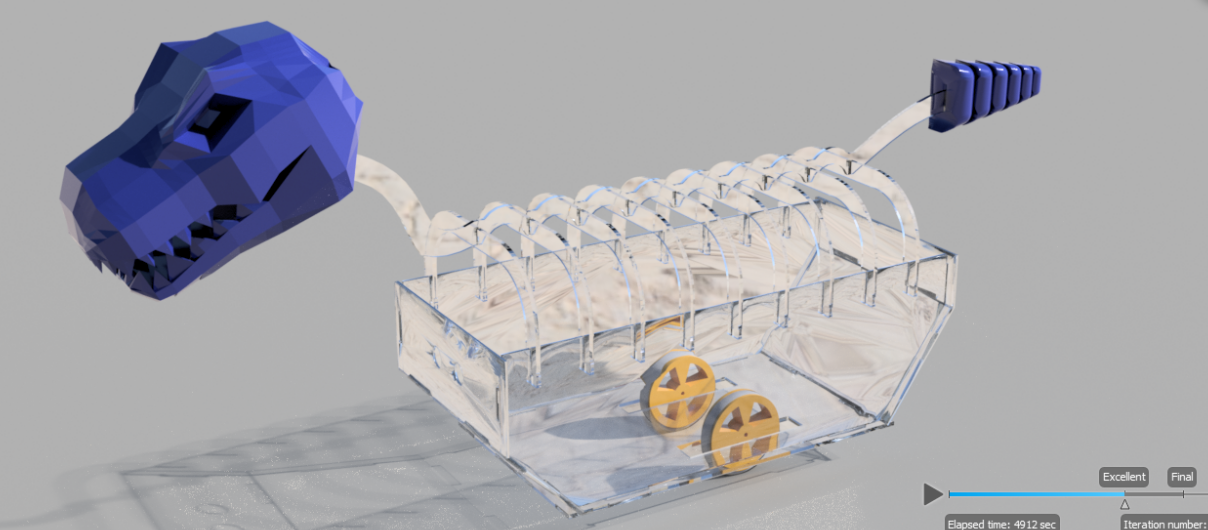 The Dino-robot will be similar to the image above. This robot will have to be like a dinosour in its shape. And it should come at least to:
The Dino-robot will be similar to the image above. This robot will have to be like a dinosour in its shape. And it should come at least to:
- Be able to move by means of wheels and motors.
- Recognize a black line with curves to indicate the way.
- And stand in front of an object when it arrives the end of the road.
As extra elements that should be reached after these three basic objectives I could try to add legs that move along with the wheels, as well as being able to select between different structures and that the programming for children will be possible, for example with a Programming by object as it could be scratch.
WHO'S DONE WHAT BEFOREHAND?:
This project comes from my job as an educator in the natural science museum, in which he notes that dinosaurs are a great resource for teaching children and adults. In parallel I realized that technology and nature sometimes separate them when it should not be so because to know a little better nature we have to help the technologies, such as a microscope. For this reasons I thought it was a great project to get a dinosaur robotic, in which people can at least learn about programming and natural science.
Some references of natural science museums that use robots as a learning method are:
As for my project I have focused mainly on a project already made in the
Fabacademy of 2016.
Finally, a little more research on the robot follows lines discovering an olympics where each year is a theme and use robots mounted with pieces to compete in these Olympics of different games for all ages. The link shown below is from the 2014 Olympics.
WHAT MATERIALS AND COMPONENTS WILL BE REQUIRED?:
The final materials I need are listed below with their costs, these materials should cover:
- the structure: by means of PLA and Methacrylate, rotten to construct the whole structure.
- Components of the Output: which must have all the components to move the motors through the A4953 H-bridge and using the ATmega168 microcontroller.
- Input components: They must use 5 IR phototransistors with 5 IR leds controlled by an ATmega168 microcontroller.
WHERE WILL THEY COME FROM?:
Some of the components aren't inventory, mainly 3:
- Dc motors: Because I wanted to use DC motors without needing a big battery I decided to take 2 motors with reductora, although I was looking for dc motors that had of torque at least 1,5 kg / cm, the ones that I found were large and needed a lot Power so finally I decided on this.
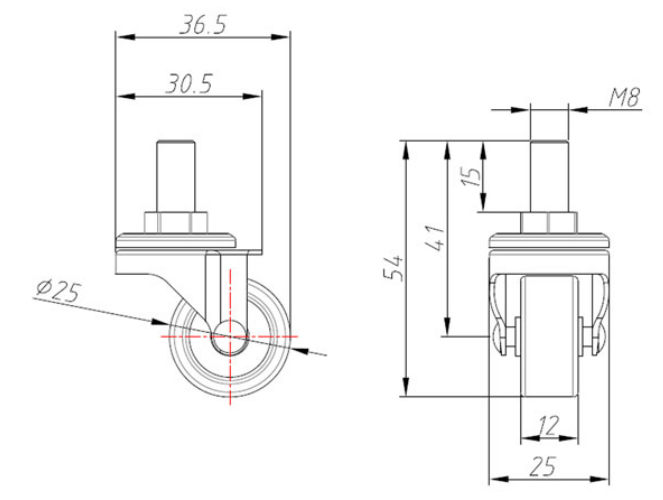
 - Front wheel: Although I could design it, I think it is an unnecessary expense of time and costs so that the front wheel will also be purchased from a local supplier.
- Front wheel: Although I could design it, I think it is an unnecessary expense of time and costs so that the front wheel will also be purchased from a local supplier.
 - Battery: it will be a 6V LiPo battery with more than 3000mA, it will also be out of inventory because in the inventory it must at least be 9.7V.
- Battery: it will be a 6V LiPo battery with more than 3000mA, it will also be out of inventory because in the inventory it must at least be 9.7V.
HOW MUCH WILL IT COST?:
WHAT PARTS AND SYSTEMS WILL MADE?:
The parts of the Dino-robot that will be made are listed below:
- The head and tail of the dino-robot.
- The body of the dino-robot.
- The boards of the sensors and the motors.
- Two of the three wheels that move the dino-robot.
- And some additional support for the fastening of elements like the motors.
WHAT PROCESSES WILL BE USED?:
The processes that I will use for the creation of the dino-robot will be:
- The laser cutter to manufacture the dino-robot body.
- 3D printing for elements more characterized as the head and tail of the dino-robot.
- The milling machine: to mill the designs of the sensor plates and motors.
WHAT TASKS NEED TO BE COMPLETED?:
I still lack:
- Mix the methacrylate cuts for the original model.
- Print the dino-robot head.
- Solid and integral the sensor board.
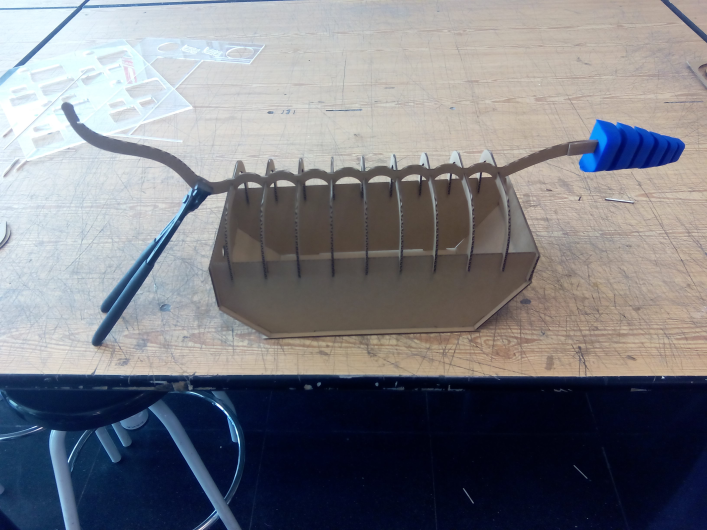 The structure is designed although it is not cut in the laser. What most needs is the programming and the networking of the plates
The structure is designed although it is not cut in the laser. What most needs is the programming and the networking of the plates
WHAT QUESTIONS NEED TO BE ANSWERED?:
The questions that most torment me now focus on the IR phototransistors
what are the values that it measures?
How should I integrate it with the motors board?
How far from the ground should the sensor plate be in order to recognize the line?
These questions are the ones that worry me the most because from these data I know if I should change the structure of the dino-robot or not.
WHAT IS THE SCHEDULE?:
HOW WILL IT BE EVALUATE?: The goal is to look like a dinosaur with the technologies and materials of a fablab and be able to follow a black line with curves until you reach an object to stop before hitting it.