Week 9 and 11
Mechanical design and Machine design(Group Project)
This week is the beginning of our group project.
The task is1) MECHANICAL DESIGN :- Make a machine, including the end effector, build the passive parts and operate it manually.
2)MACHINE DESIGN (week 2 of 2):-Automate your machine. Document the group project and your individual contribution.
We have to plan and execute well to finish our projects within the time allowed. Firstly we made whole team as a single group.
Next we want to decide a group leader for the project, and separate wing to do their task. So that whole project will be finished easily.
Planning and Team
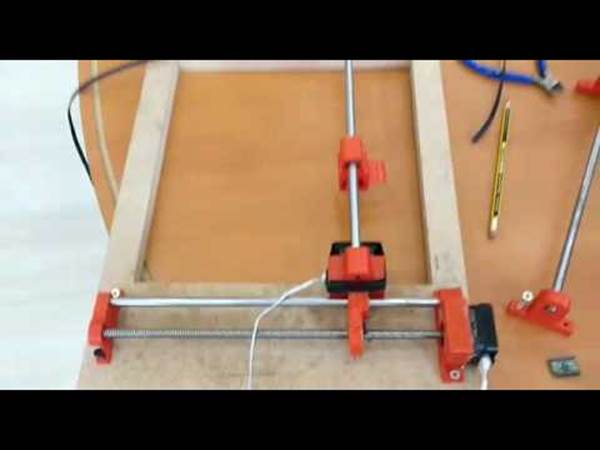
We made our friend Mohammad Almatori as group leader. We discussed many thing and many ideas came out from different members. finally planned to make a 2 axis machine.For naming the project we discussed among different members and finally we got a name as “Find Me”.
The project description , phases carried out ,wings for different sessions, roles and responsibility.bill of materials,assembling,coding and testing is described in this link.
One of our team member brought old 3D printer(makerbot) and we dispatched the parts and taken out which can be used for our project.


The team structure is as follows,i came under testing and execution team.
For the project the plan and task was as following:
|
|
Tasks A |
Tasks B |
|
1 |
Start by doing sketch of the
project |
|
|
2 |
Build a bill of material |
Start circuit schematic
design |
|
3 |
Start buying the hardware |
Start PCB design |
|
4 |
Start designing the 3d
models |
PCB Prototyping |
|
5 |
test print |
Testing electronic connections
of circuit and Stepper motors |
|
6 |
Check mistakes and reprint |
Programming the Board |
|
7 |
Get the hardware working
smooth manually |
Integrating Hardware and
Electronics together |
My contribution
Since i came under testing and execution team,I took the
charge of coding as well as a participant testing.Which will be the more patience and brainstorming session in the
project.
Testing,assembling and other activities link are as follows.

Video 1

Video 2:
The above videos are from the Group project videos.
As my task comes under Coding and execution team,I started working on the Coding and electronics sections,Interfering the motors etc.
Since the project consisting of 2 stepper motor, We have to make the code which will control the motion of these two stepper motors.
I coded as follows. Each time i have to test part by part and verify it.It was little time consuming. But finally we got it.
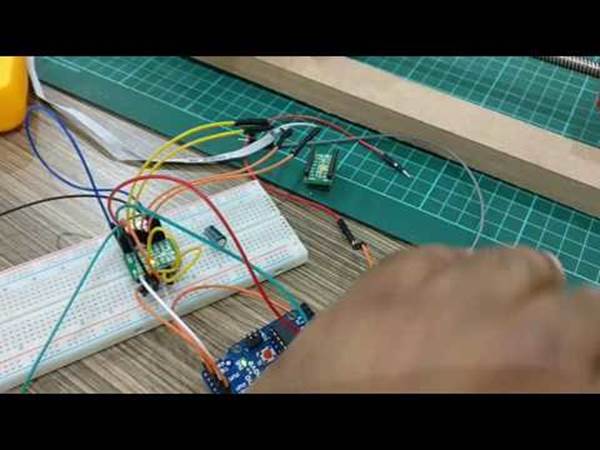
Electronics Items Used
1- Arduino Duemilanove board
2-Jumper wires for connection
3-Breadboard to make connecting
4-LED
5-Stepper motors
6-push Buttons
Code
In code, I declared variables, pins for stepper motors,directions,LED pins.proceeded with step y step to move and locate positions and thereby reaching final requirement.
#define dirPin 7
#define stepPin 6
#define enablePin 5
#define enablePin2 8
#define stepPin2 9
#define dirPin2 10
int j;
int G;
int Y;
int X;
int D;
int STPER1;
int STPER2;
const int buttonPin = 2; // the number of the pushbutton pin
const int buttonPin2 = 3;
const int ledPin = 13; // the number of the LED pin
int f1=0;
int f2=0;
// variables will change:
int buttonState = 0; // variable for reading the pushbutton status
int buttonState2 = 0;
void setup() {
// We set the enable pin to be an output
pinMode(enablePin, OUTPUT);
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(enablePin2, OUTPUT);
pinMode(stepPin2, OUTPUT);
pinMode(dirPin2, OUTPUT);
pinMode(13, OUTPUT);
// then we set it HIGH so that the board is disabled until we
// get into a known state.
digitalWrite(enablePin, HIGH);
digitalWrite(enablePin2, HIGH);
Serial.begin(9600);
Serial.println("Choose your box");
Serial.print (" 1 BOX -- ");
Serial.print(" 2 BOX -- ");
Serial.println(" 3 BOX -- ");
Serial.print (" 4 BOX -- ");
Serial.print(" 5 BOX -- ");
Serial.println(" 6 BOX -- ");
Serial.print (" 7 BOX -- ");
Serial.print(" 8 BOX -- ");
Serial.println(" 9 BOX -- ");
// Serial.println("Start With Distance:: 30000 are your intail distance");
}
void loop() {
///////////////////////////////////////////////////////////
//////////////////////////HOME/////////////////////////////////
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
// digitalWrite(ledPin, HIGH);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
do{
buttonState = digitalRead(buttonPin);
if (f1 == 0) {
Serial.print ("HOME 1");
if(buttonState == HIGH) {
digitalWrite(ledPin, HIGH);
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
Serial.print (f1);
}
else if(buttonState == LOW) {
// turn LED off:
digitalWrite(ledPin, LOW);
f1=1;
};
};
}while(f1<1);
do{
buttonState2 = digitalRead(buttonPin2);
if (f2 == 0) {
Serial.println ("HOME 1");
if(buttonState2 == HIGH) {
digitalWrite(ledPin, HIGH);
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
Serial.print (f1);
}
else if(buttonState2 == LOW) {
// turn LED off:
digitalWrite(ledPin, LOW);
f2=1;
};
};
}while(f2<1);
///////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////
digitalWrite(ledPin, LOW);
// put your main code here, to run repeatedly:
while(Serial.available()) {
char ST = Serial.read();
switch (ST) {
///////////////////////////////////////////////////////////
case '1':
Serial.println("ONE");
Y=15000/3; //5
X=15000/3;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
////////////////////////////////////////////////////////////////////////
case '2':
Serial.println("TWO");
Y=8000/3; //5
X=15000/3;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
////////////////////////////////////////////////////////////////////////
case '3':
Serial.println("Three");
Y=(1000); //5
X=15000/3;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
////////////////////////////////////////////////////////////////////////
case '4':
Serial.println("Four");
Y=15000/3; //5
X=9000/3;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
////////////////////////////////////////////////////////////////////////
case '5':
Serial.println("five");
Y=(8000/3); //5
X=9000/3;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
////////////////////////////////////////////////////////////////////////
case '6':
Serial.println("Six");
Y=(1000); //5
X=9000/3;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
////////////////////////////////////////////////////////////////////////
case '7':
Serial.println("Seven");
Y=15000/3; //5
X=500;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
////////////////////////////////////////////////////////////////////////
case '8':
Serial.println("Eight");
Y=8000/3; //5
X=500;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
////////////////////////////////////////////////////////////////////////
case '9':
Serial.println("Nine");
Y=(500); //5
X=500;
digitalWrite(enablePin, 0);
digitalWrite(enablePin2, 0);
delayMicroseconds(20);
digitalWrite(dirPin, 0);
digitalWrite(dirPin2, 0);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
// Serial.println("X working");
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
for (int u=0 ; u<= 2000 ; u++){
delayMicroseconds(2000);
digitalWrite(13,HIGH);
}
digitalWrite(13,LOW);
digitalWrite(dirPin, 1);
digitalWrite(dirPin2, 1);
for (j = 0; j <= Y; j++) {
digitalWrite(stepPin, LOW);
delayMicroseconds(50);
digitalWrite(stepPin, HIGH);
delayMicroseconds(5000);
}
for (j = 0; j <= X ; j++) {
digitalWrite(stepPin2, LOW);
delayMicroseconds(50);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(5000);
}
break;
}
}
}
Assembling And
Testing Videos and progresses
· Here iam adding some more videos of testing at different levels and the problems while doing the testing. Some of them will be in arabic.I shooted some moments only as I am busy with the code and testing. I think my collegues who are in charge of documentation and other things have uploaded more on their pages.
There was problem with the Stepper motor driver. The motor was not moving and. I Checked with other as well. But both were not working . So Then I checked with other one remaining over here . So it was fine.
This is in arabic. I was explaining to my collegues regarding the stepper driver problem and then what I done like that.
· Here iam adding other videos. In thtat videos you can see various problems and problem with the movement and making sound.
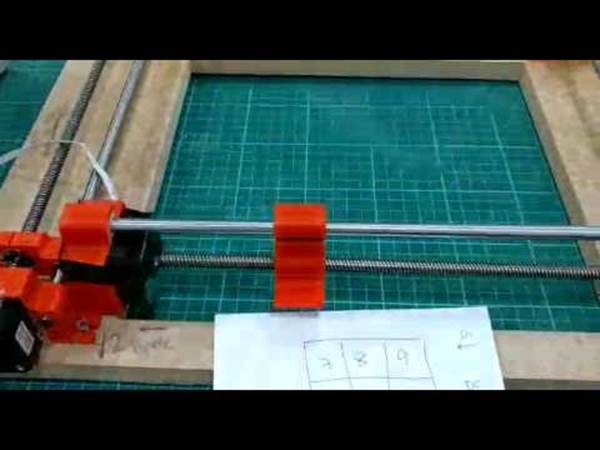
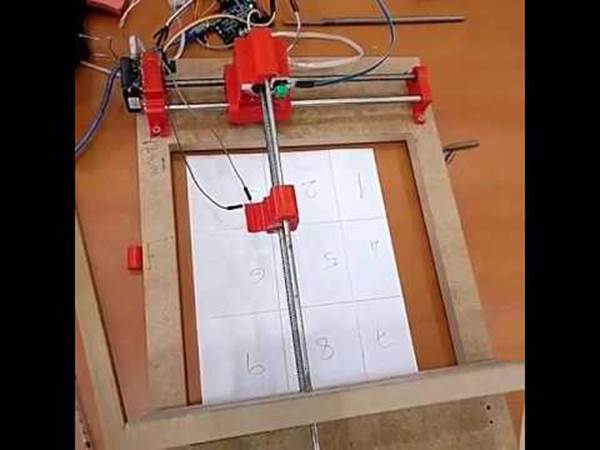
There are 9 positions for movement. I tested with respective positions and thetre was problem with the caliberation as well.Ineed to caliberate this by changing the values for position. You can see the changes. Clearing the sound by changing the mechanical things, Problem with the gliding mechanism, and then fixing the sliding mechanism by the use of Other mechanical structure. , Checking the positions, caliberating and then fixing every thing can be seen in the following videos.
· Testing video with reduced sound and pending of belt mechanism.
· Testing finally with the positions and lights: Here you can see the machine moving to slot 5 as given in the serial monitor of Arduino program. Al so you can see the limit switch(Switch attached at the end).
.
Final working of project which I shows in my personal instagram account is here. Instagram
Videos from documentation teams

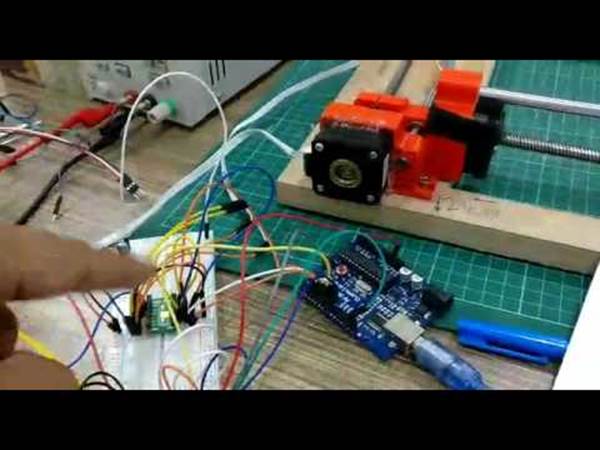
Assembling Process
I am the person who is seeing In the above Video snap and speaks in english. I am explaining this things in vthe video. Here In this video you can see me,Our group leader along with the other members assembling the 3D printed Parts and testing for the machine.

Failure and solutions
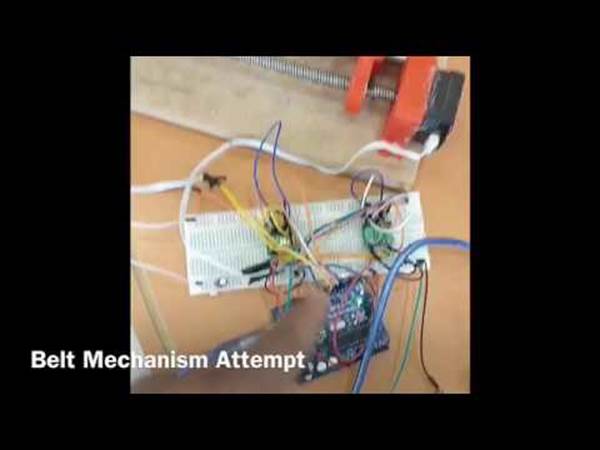
Belt mechanism and
attempts of mechanism working
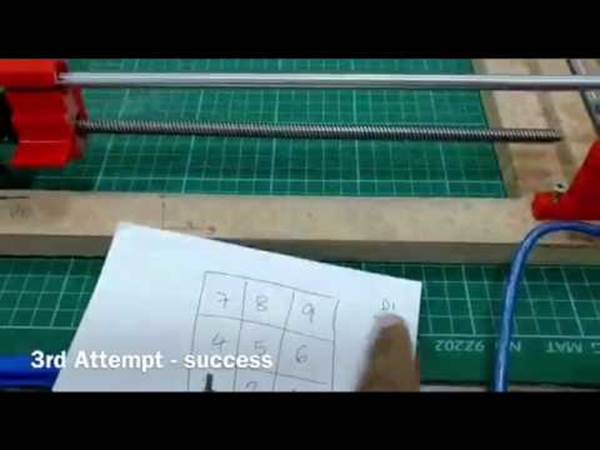
3rd
attempt

Final video
The last video showing how the machine working and I am explaining the things. This was how our project completed.
Results and conclusion:
Making of a two axis machine with a group was really shown me how a team work results and the implementing and testing at different level are very interesting. Achieving the Project completed state will provide a great satisfaction for whole group.
Points of improvement:
I think that we can start by:
1-
Adding a servo motor and
grep instead of the LED.
2-
The code should be improved
to pick up from start point to certain locations
3-
The hardware should be
redesigned to be more compact and faster