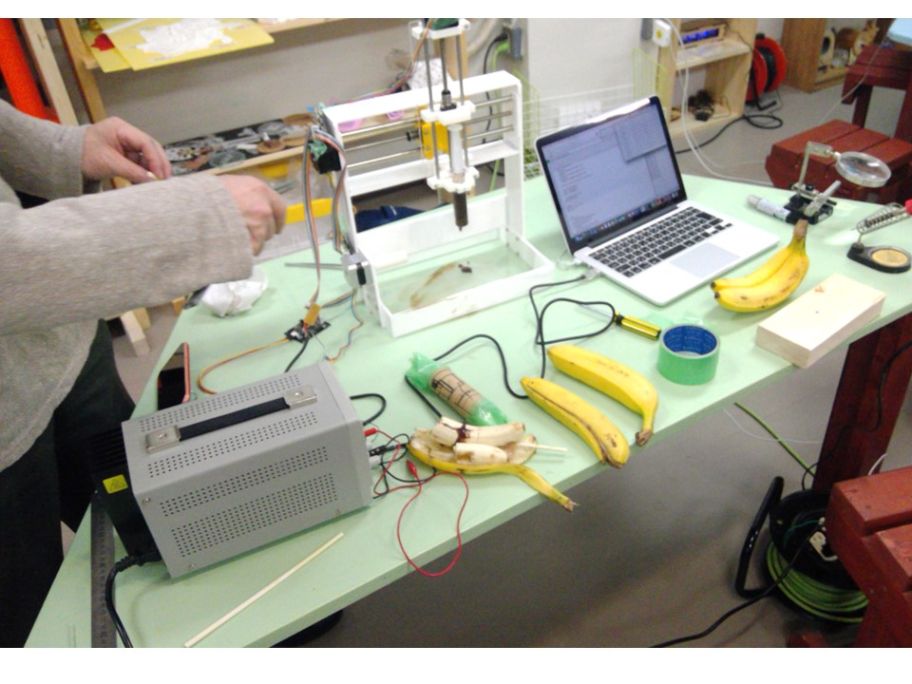
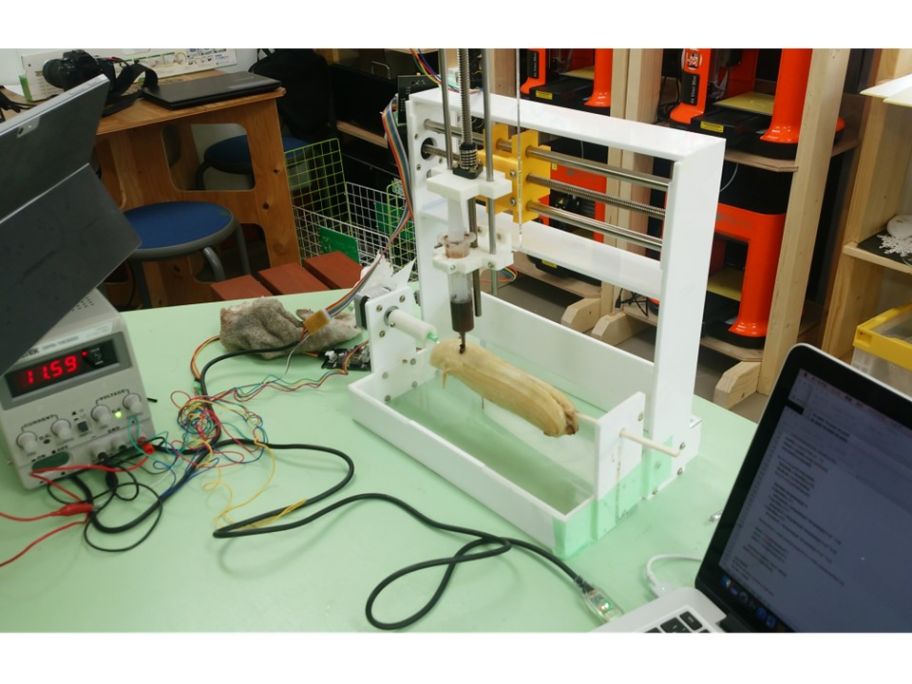
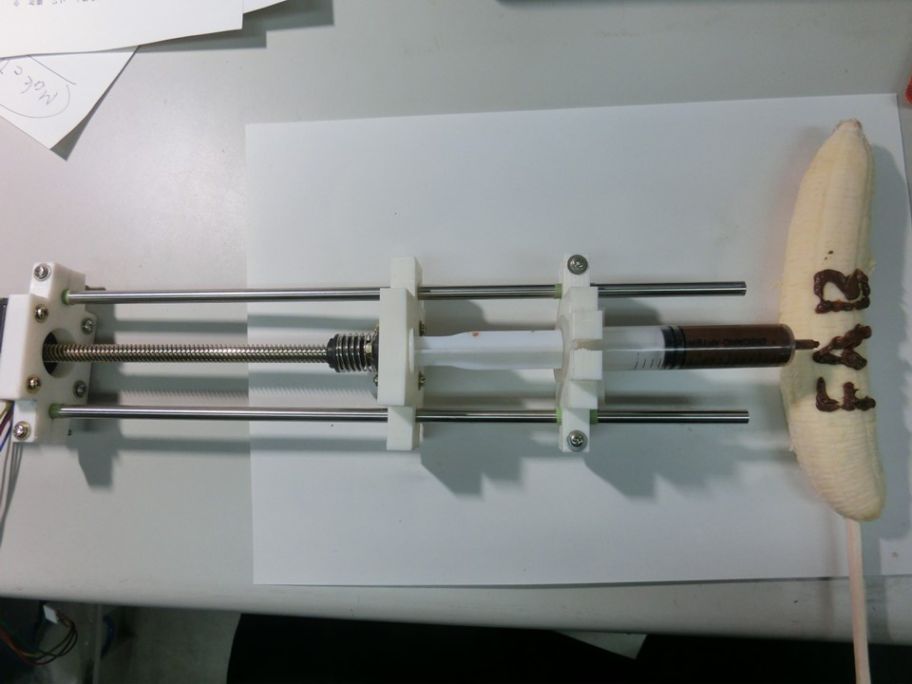
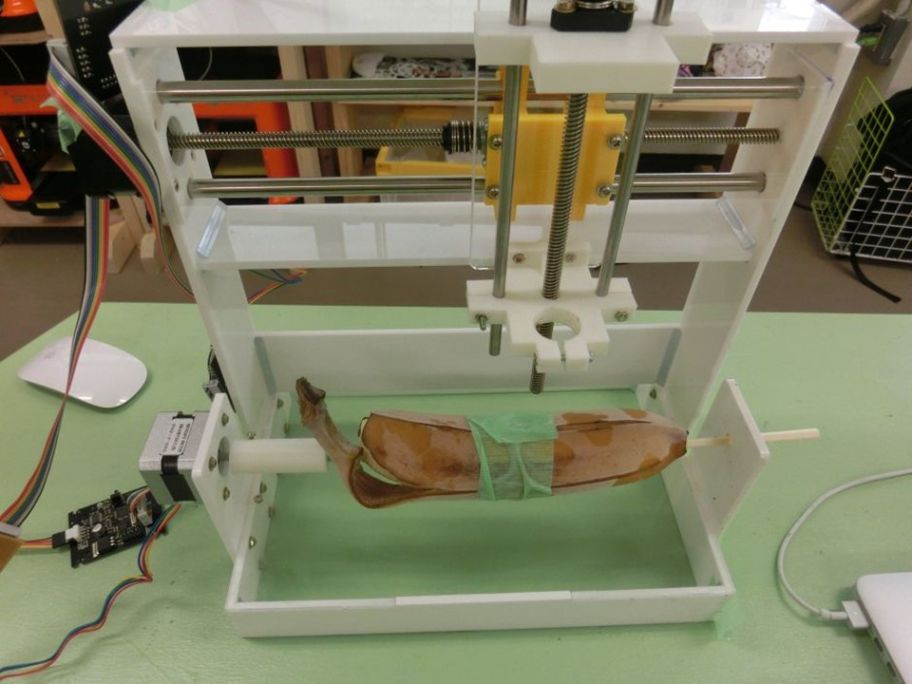
4. Drawn on banana
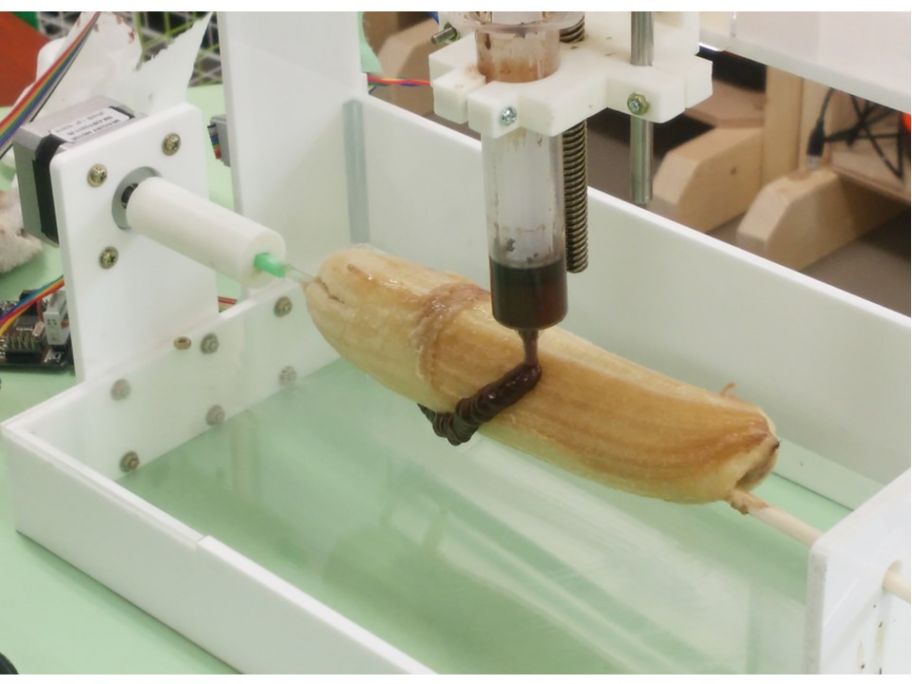
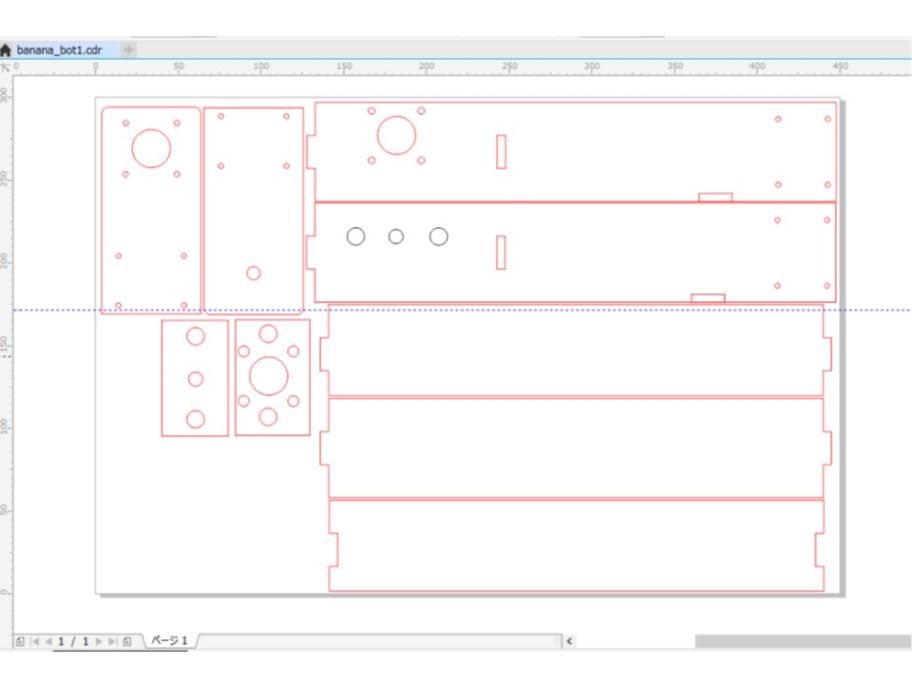
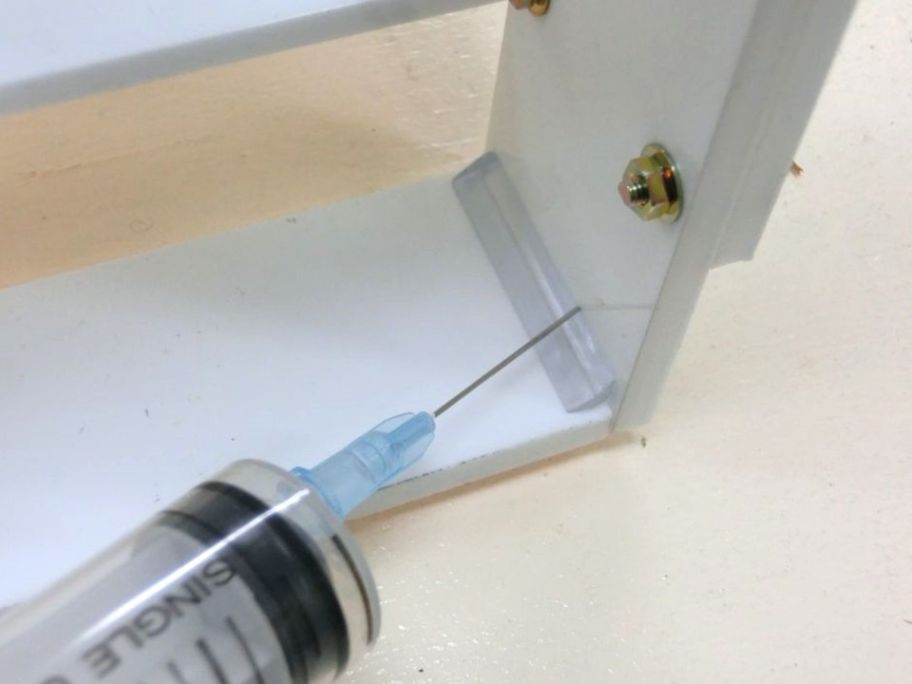
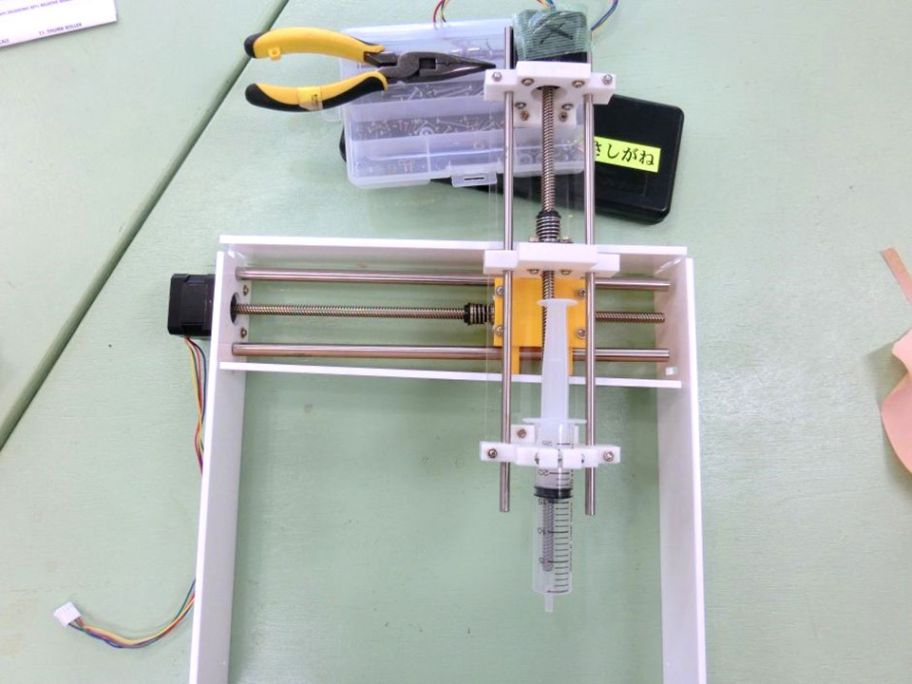
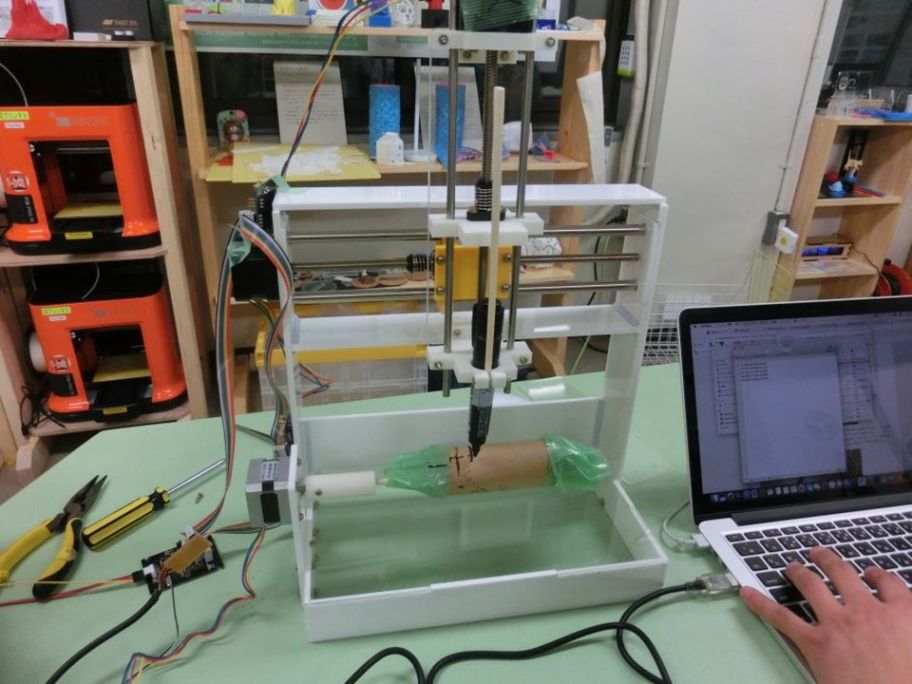
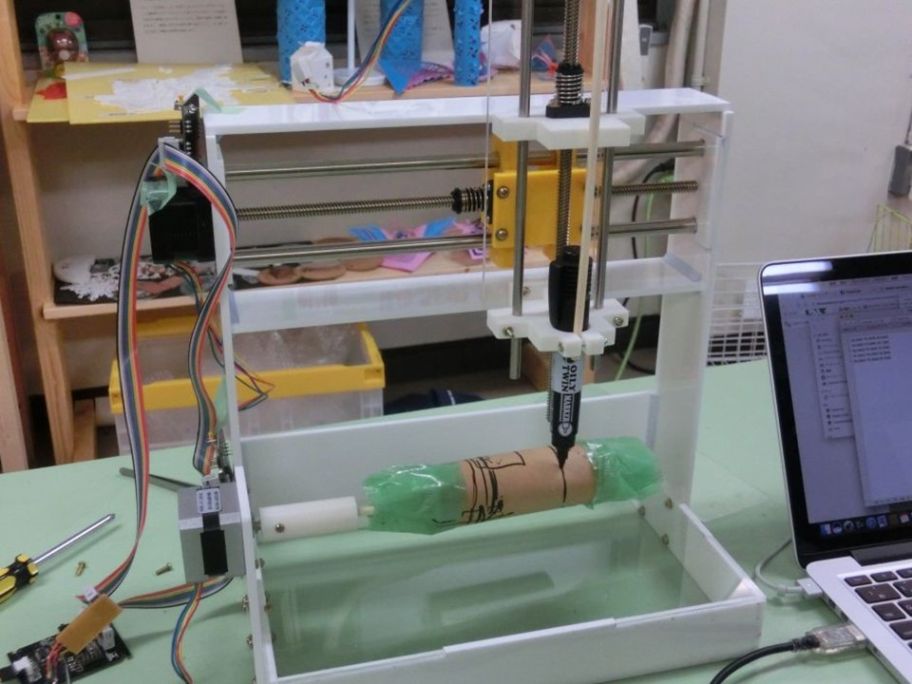
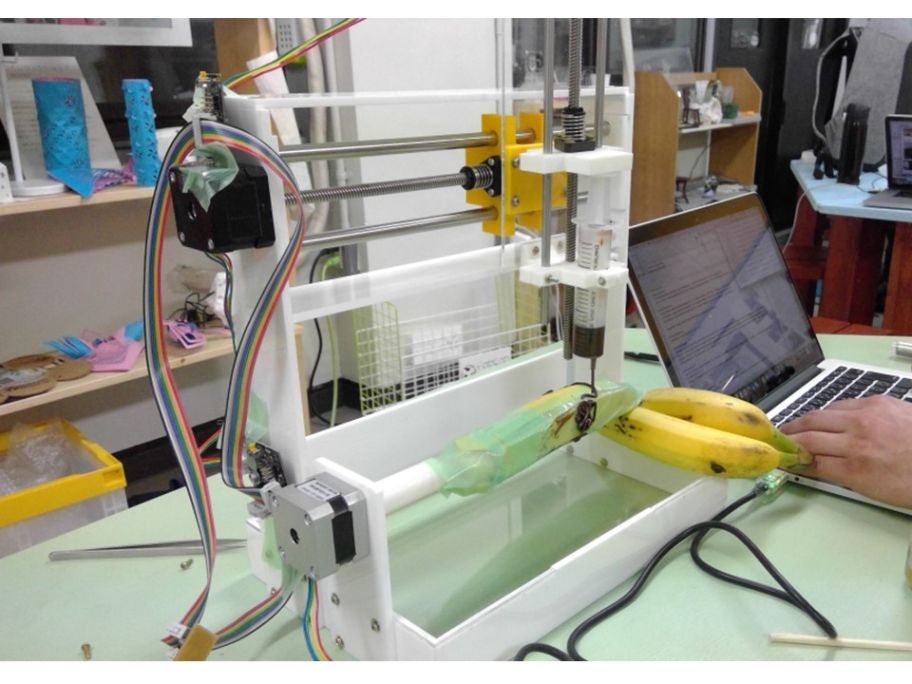
In the final stage We actually drew in chocolate to the banana. The banana to buy also selected a straight shape banana. We measured the size and adjusted the position of the syringe.Chocolate mixed two kinds of syrups with different softness to prepare chocolate of appropriate softness. Because the banana is soft, We frozen on the previous night.
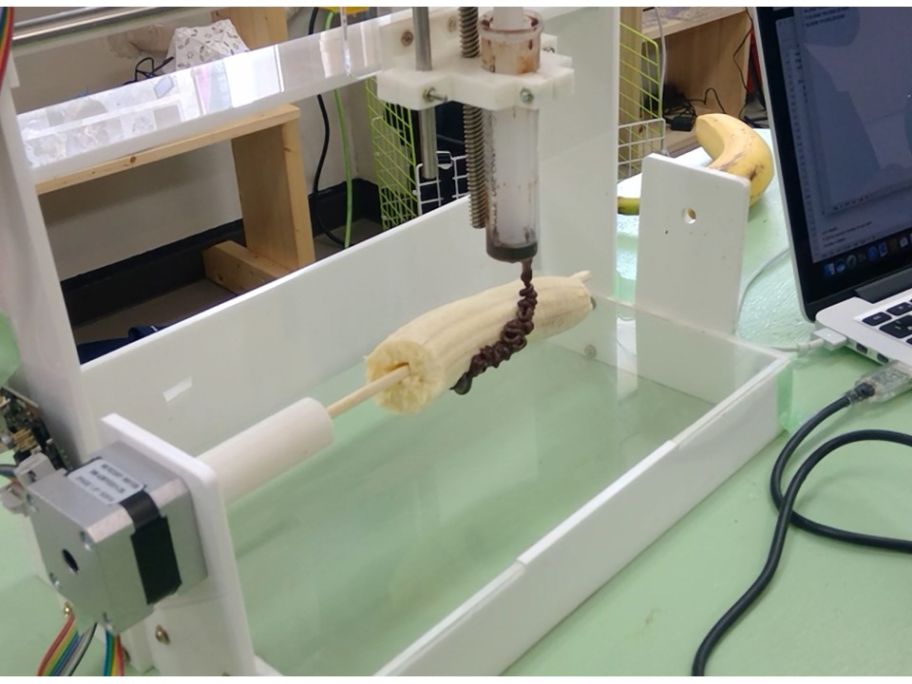
We did a test, but chocolate was not discharged as We wanted and We failed ourself repeatedly.
-FabLab Hamamatsu
Guru.Takemura: Programming, Mr.Kato: Recording and test support -FabLab Nagano
Muramatsu: Hardware production and assembly ,Mr.Asanuma: Recording and test support
# Control program(FAB.py)
# Two stage example Virtual Machine file
# moves get set in Main
# usb port needs to be set in initInterfaces
# Nadya Peek Dec 2014
#------IMPORTS-------
from pygestalt import nodes
from pygestalt import interfaces
from pygestalt import machines
from pygestalt import functions
from pygestalt.machines import elements
from pygestalt.machines import kinematics
from pygestalt.machines import state
from pygestalt.utilities import notice
from pygestalt.publish import rpc #remote procedure call dispatcher
import time
import io
import math
#------VIRTUAL MACHINE------
class virtualMachine(machines.virtualMachine):
def initInterfaces(self):
if self.providedInterface: self.fabnet = self.providedInterface #providedInterface is defined in the virtualMachine class.
else: self.fabnet = interfaces.gestaltInterface('FABNET', interfaces.serialInterface(baudRate = 115200, interfaceType = 'ftdi', portName = '/dev/tty.usbserial-FTZ2C0Z3'))
def initControllers(self):
self.xAxisNode = nodes.networkedGestaltNode('X Axis', self.fabnet, filename = '086-005a.py', persistence = self.persistence)
self.yAxisNode = nodes.networkedGestaltNode('Y Axis', self.fabnet, filename = '086-005a.py', persistence = self.persistence)
self.zAxisNode = nodes.networkedGestaltNode('Z Axis', self.fabnet, filename = '086-005a.py', persistence = self.persistence)
self.xyzNode = nodes.compoundNode(self.xAxisNode, self.yAxisNode, self.zAxisNode)
def initCoordinates(self):
self.position = state.coordinate(['mm', 'mm', 'mm'])
def initKinematics(self):
self.xAxis = elements.elementChain.forward([elements.microstep.forward(1), elements.stepper.forward(1.8), elements.leadscrew.forward(2), elements.invert.forward(False)])
self.yAxis = elements.elementChain.forward([elements.microstep.forward(1), elements.stepper.forward(1.8), elements.leadscrew.forward(18), elements.invert.forward(True)])
self.zAxis = elements.elementChain.forward([elements.microstep.forward(1), elements.stepper.forward(1.8), elements.leadscrew.forward(2), elements.invert.forward(False)])
self.stageKinematics = kinematics.direct(3) #direct drive on all axes
def initFunctions(self):
self.move = functions.move(virtualMachine = self, virtualNode = self.xyzNode, axes = [self.xAxis, self.yAxis, self.zAxis], kinematics = self.stageKinematics, machinePosition = self.position,planner = 'null')
self.jog = functions.jog(self.move) #an incremental wrapper for the move function
pass
def initLast(self):
#self.machineControl.setMotorCurrents(aCurrent = 0.8, bCurrent = 0.8, cCurrent = 0.8)
#self.xyzNode.setVelocityRequest(8) #clear velocity on nodes. Eventually this will be put in the motion planner on initialization to match state.
pass
def publish(self):
#self.publisher.addNodes(self.machineControl)
pass
def getPosition(self):
return {'position':self.position.future()}
def setPosition(self, position = [None]):
self.position.future.set(position)
def setSpindleSpeed(self, speedFraction):
#self.machineControl.pwmRequest(speedFraction)
pass
#------IF RUN DIRECTLY FROM TERMINAL------
if __name__ == '__main__':
# The persistence file remembers the node you set. It'll generate the first time you run the
# file. If you are hooking up a new node, delete the previous persistence file.
stages = virtualMachine(persistenceFile = "test.vmp")
# You can load a new program onto the nodes if you are so inclined. This is currently set to
# the path to the 086-005 repository on Nadya's machine.
#stages.xyNode.loadProgram('../../../086-005/086-005a.hex')
# This is a widget for setting the potentiometer to set the motor current limit on the nodes.
# The A4982 has max 2A of current, running the widget will interactively help you set.
#stages.xyNode.setMotorCurrent(0.7)
# This is for how fast the
stages.xyzNode.setVelocityRequest(3)
tempdatoX=0
tempdatoY=0
tempdatoZ=0
datoX=0
datoY=0
datoZ=0
listaTemp=[]
listaG =[]
codeG = open("FAB.nc", "r")
linesG = codeG.read().splitlines()
nroLinesG=len(linesG)
for x in xrange(0,nroLinesG):
tempdata = linesG[x].split()
tempLen = len(tempdata)
for y in xrange(0,tempLen):
identifier=tempdata[y][0:1]
if identifier=="X":
tempdatoX = tempdata[y][1:tempdata[y].find(".")+3]
if identifier=="Y":
tempdatoY = tempdata[y][1:tempdata[y].find(".")+3]
if identifier=="Z":
tempdatoZ = tempdata[y][1:tempdata[y].find(".")+3]
#tempdatoZ = math.pow(tempdatoX,2) + math.pow(tempdatoY,2)
datoX = float(tempdatoX)*1
datoY = float(tempdatoY)*1
datoZ = float(tempdatoZ)*1
listaTemp=[datoX, datoY, datoZ]
listaG.append(listaTemp);
print listaG
# Some random moves to test with
moves = listaG
# Move!
for move in moves:
stages.move(move, 0)
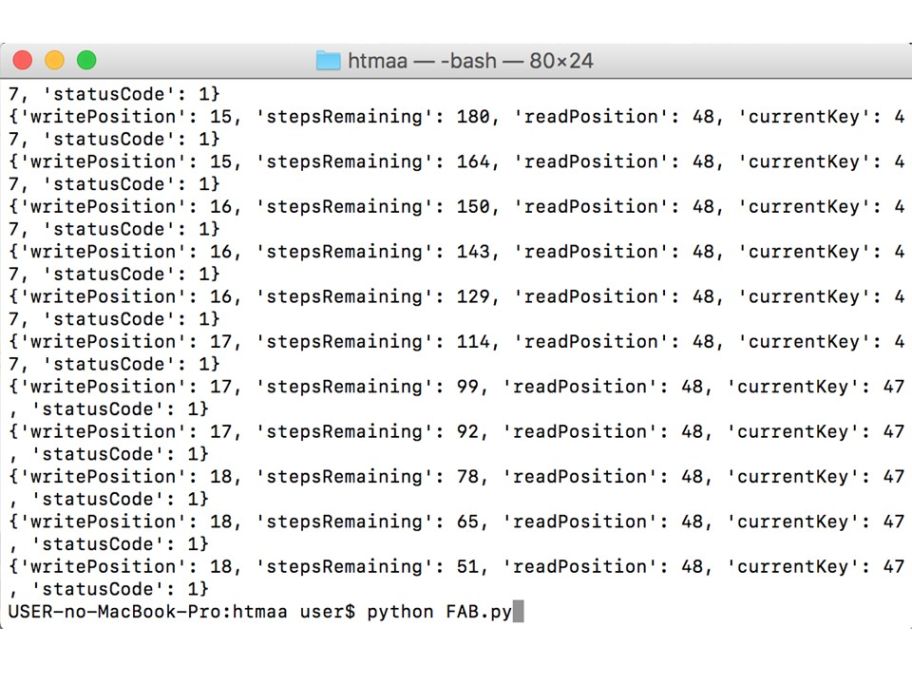
status = stages.xAxisNode.spinStatusRequest()
# This checks to see if the move is done.
while status['stepsRemaining'] > 0:
time.sleep(1)
status = stages.xAxisNode.spinStatusRequest()



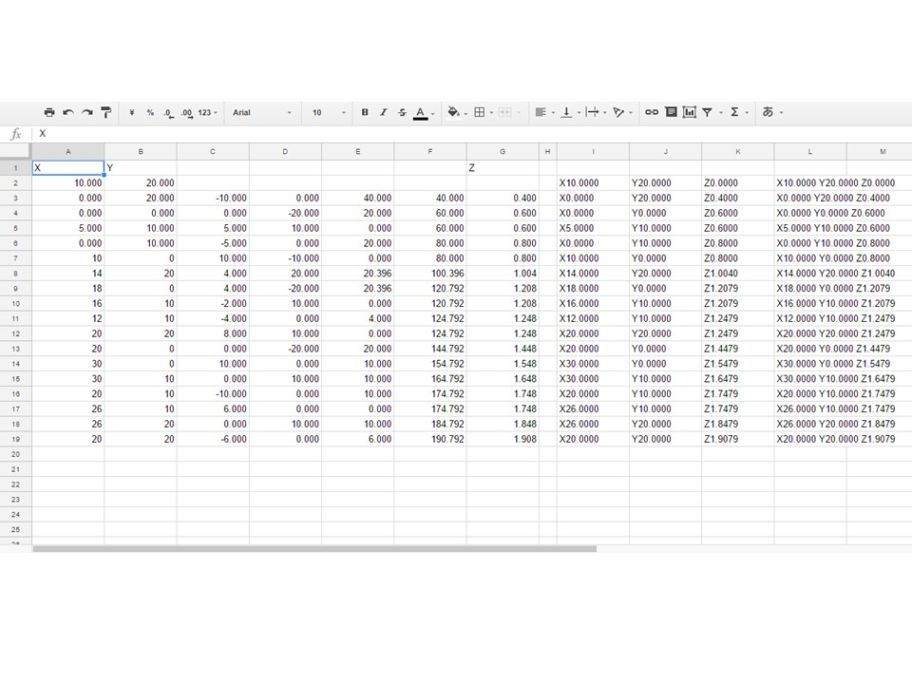
 >G-code setting sheet(Google Spreadsheet)
>G-code setting sheet(Google Spreadsheet)



 We did a test, but chocolate was not discharged as We wanted and We failed ourself repeatedly.
We did a test, but chocolate was not discharged as We wanted and We failed ourself repeatedly.