Assignments 15
Networking and Communications
For this assignment, I decided to use my Fabduino FABKIT 2.0 board and a board of the same type, to make these two connect using I2C language.
That is to say, the I2C language protocol will be used in which two controllers (fabduino) communicate or send signals through a physical medium, which would be the Ribbon or MH cables, and manage to receive signals between the slave and the master through each One of its pins. For this exercise signal will be sent to pin 8.
The fabduinos manufactured in the previous assignments will be used.

First link using M-H cables the digital pins to get involved in programming.
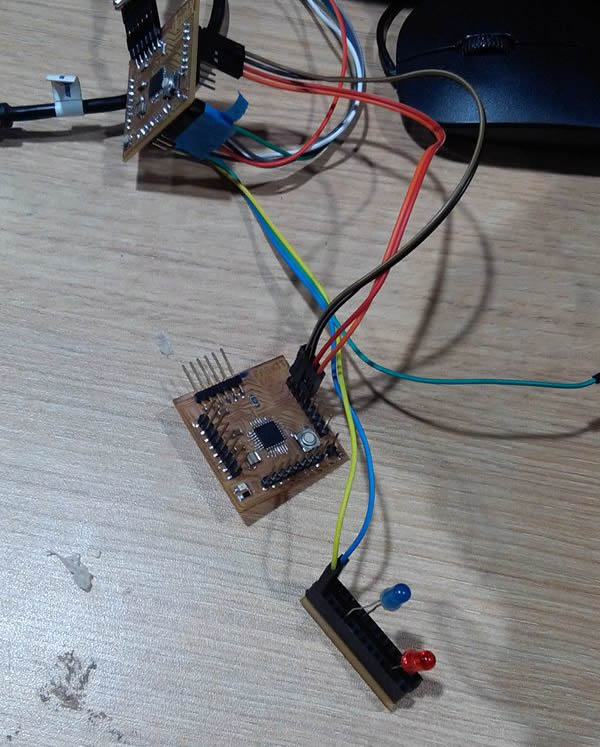
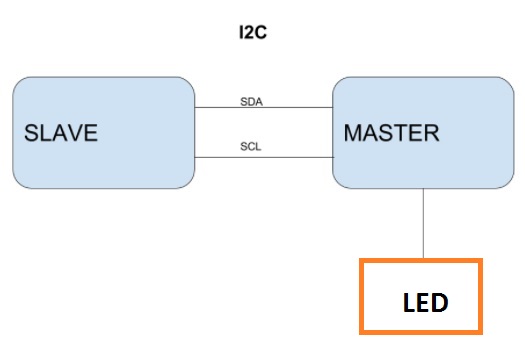
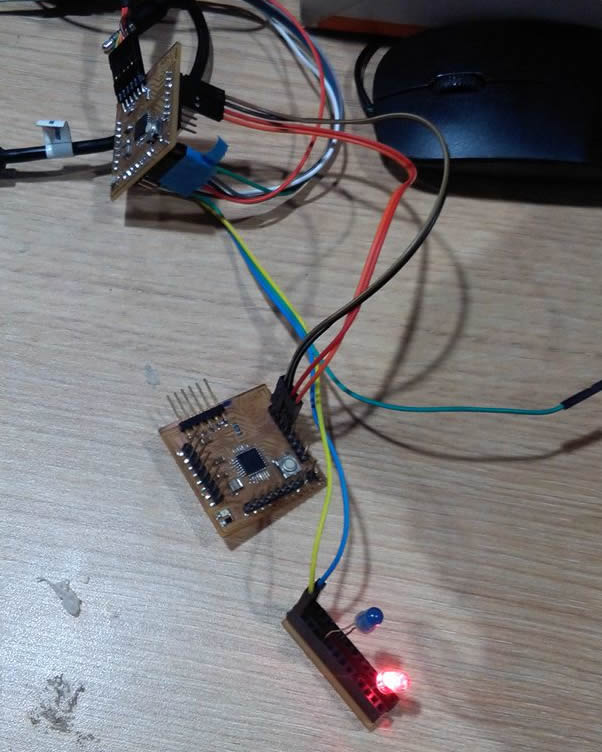
The main idea is abstracted in the right image. The slave will send a numbers between 0 and 127 when the master request communication, it will get the value to transform in angle of servomotor. The slave address is 8 and send one byte. This idea become real when I connect two fabduinos through SDA/SCL pins. In master board connects a LED THROUGH HOLE. The next images show this hardware implementation. Additionally, we connect fabduino with FTDI wire and AVRISP. The power supply is the same for boths kits.
The Master-Slave language is used,
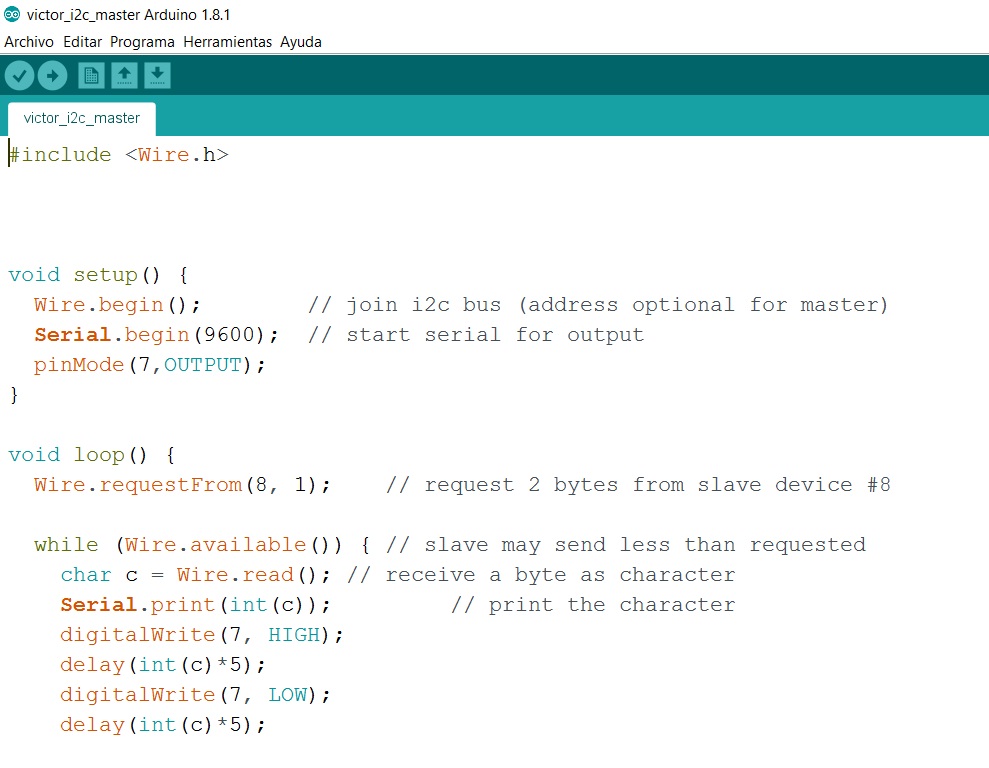
For this it is programmed that the Master requires through pin 8 to the Slave, so that it is configured as a Delay.
In each code that is in Arduino, I will explain to your side that it works with that code.
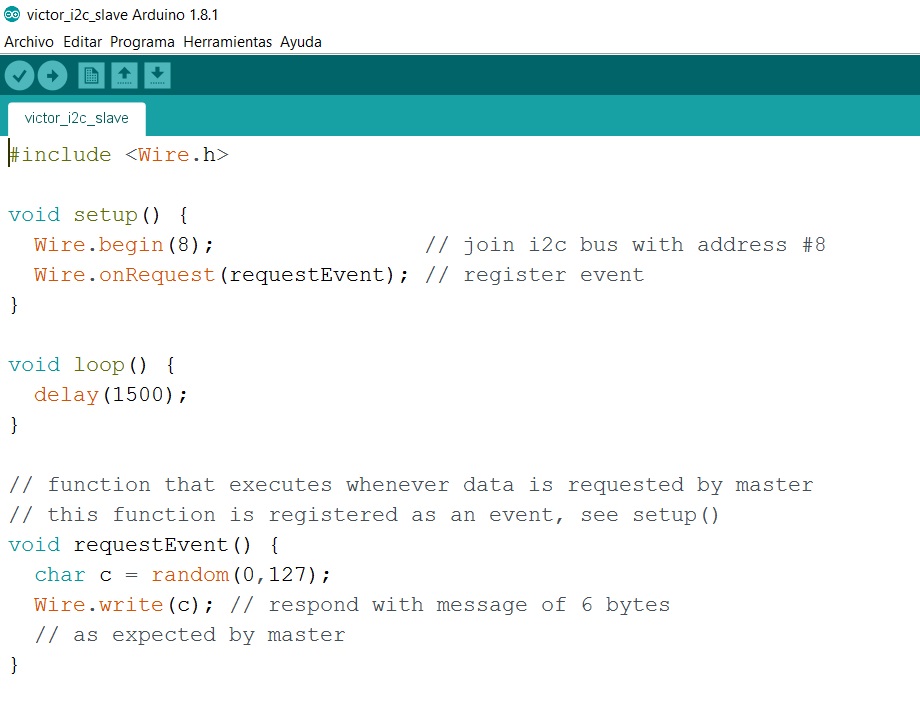
Then the Slave is configured so that whenever it is required, via pin 8, the Slave drops a High signal as output for a time interval.
This output would be a led through hole that lights when the communication between FABKITS is made.
Click here for Download the PROGRAMMING FILES

Bluetooth

Also as an extra assignment I acquired a bluetooth module, which I was researching the data sheet of the module, since I intend to use this module as a means of
communication in my final project. Since my GO KART will have the function of being able to perform functions from an application in the cell to be able to perform actions in the KART,
such as being able to turn on the LED lights or register as a DELAY the speed detected by the encoder.