Hexa-bot
The objective of this assignment is to Model (raster, vector, 2D, 3D, render, animate, simulate, …) a possible final project . We have to evaluate and select 2D and 3D software to demonstrate and describe the process of modeling.
Requirments:
// Modelled experimental objects/part of a possible project in 2D and 3D software.
// Shown how you did it with words/images/screenshots.
// Included your original design files.
// Try as many 2D/3D softwares you can.
Experience
I have been using digital software for quite some time and i have a good experience generally with mesh modeling and geometries form finding in Rhino and Maya. I have started expanding my computation skills in grasshopper and coding since last year. So i decided to use Rhino and processing to formulate my ideas for self organizing/ self assembling concept.
I am exploring two different scales of self assembling/ organizing, the one i am calling self assembly is the bigger scale and the one that has to do with both dimensions in order to do a space . The other scale is what i am calling self organizing system where you have a number of members to formulate themselves according to an out source input, could be light, sound, or any other signals, where you control both the input and the output which is the small robots behaviour.
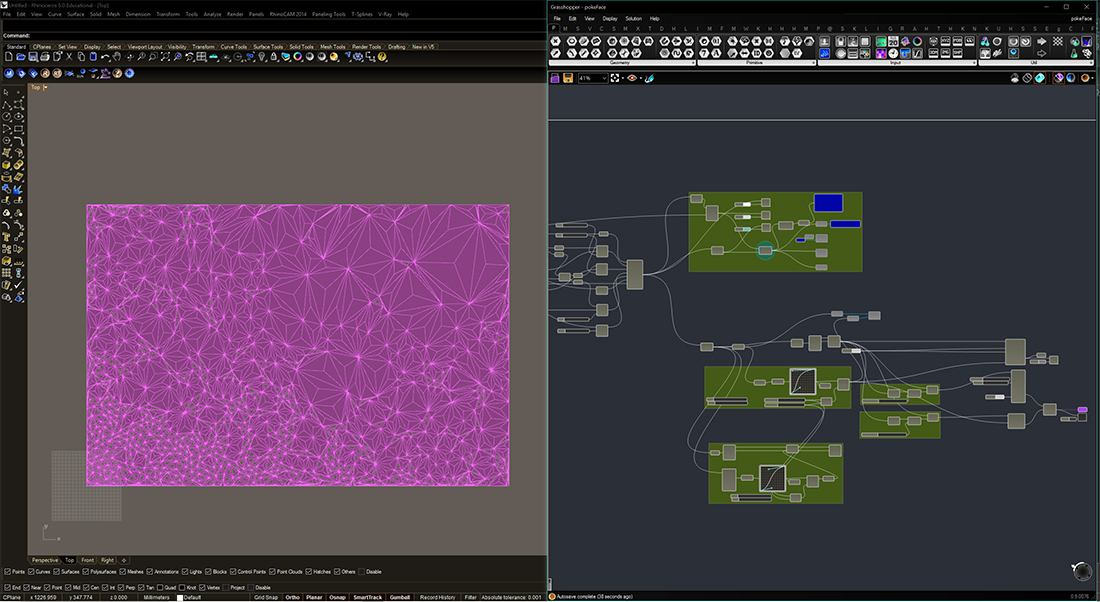
I have used grasshopper a parametric design tool aka visual scripting for Rhino.
I have this obsession with triangles, and i attended to make a pattern that graduailly changes from small triangles to bigger ones. It is parametric in a way that i have set different parameters in order to change the design, like the area of the triangle and the graduality of the pattern.
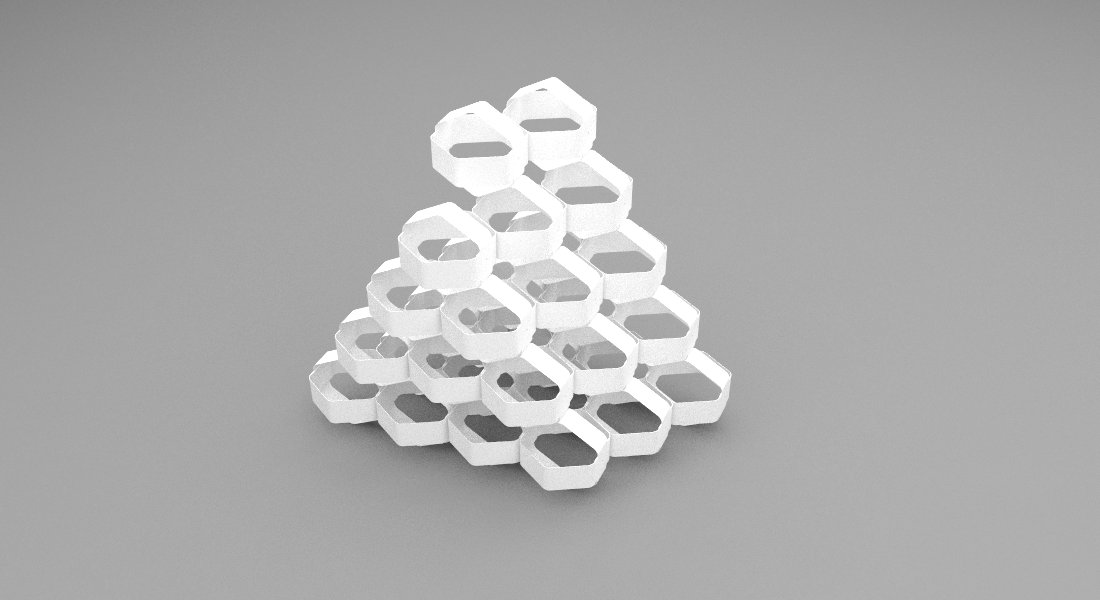 A unit of 15x15x15cm as a bounding box that would assemble itself in both 2D and 3D to make architecture and other things
A unit of 15x15x15cm as a bounding box that would assemble itself in both 2D and 3D to make architecture and other things 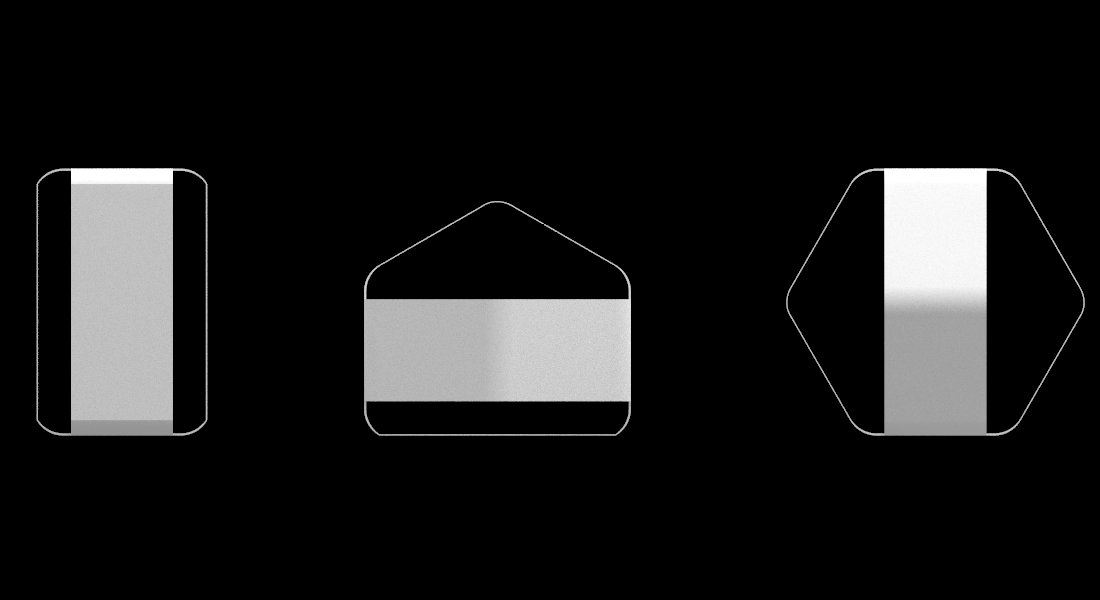 Three different assembling configurations of one unit
Three different assembling configurations of one unit 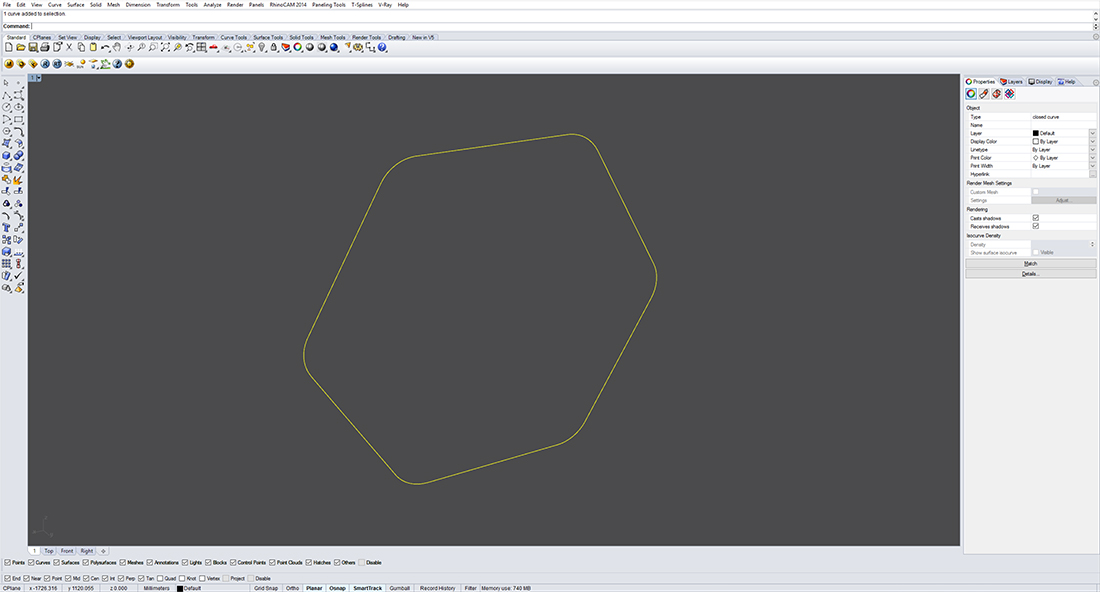 Draw a curve using the command polyline and round the corners using the command fillet with the radius needed
Draw a curve using the command polyline and round the corners using the command fillet with the radius needed 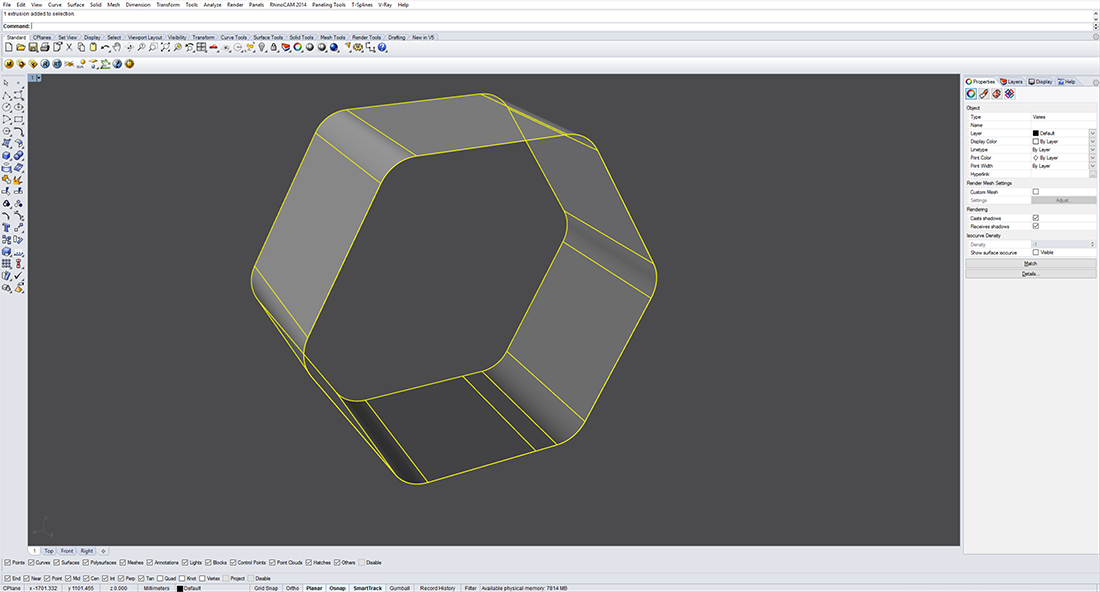 Extrude the curve using the command extrude
Extrude the curve using the command extrude 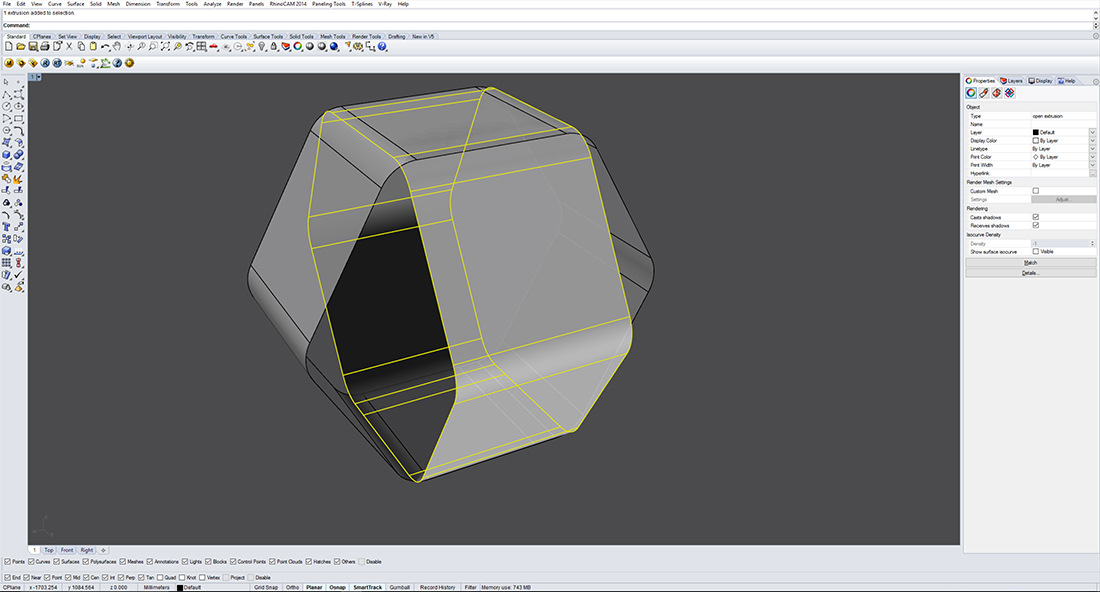 Rotate using the command rotate
Rotate using the command rotate another 2D design attempt using processing: coding software to present my final design concept
Detecting swarm behaviour as small robots that follow an out source digital input: light, sound or any other signal
ExplanationIn the natural world, organisms exhibit certain behaviors when traveling in groups. This phenomenon, also known as flocking, occurs at both microscopic scales (bacteria) and macroscopic scales (fish). Using computers, these patterns can be simulated by creating simple rules and combining them. This is known as emergent behavior, and can be used in games to simulate chaotic or life-like group movement. And the main three rules used to simulate flocking are: alignment, cohesion and separation.
Terminology
Agent: A single entity or character.
Velocity vector: An agent's current velocity.
Neighborhood: A certain area around the agent, used to look for other agents.
Resultant: The vector obtained from the calculations of the rule.