First prototype
We started with cardboard and made simple templates to see how the different axis are moving and trying to understand how we should build our arm. We made a simple connection for the rotation of the base. Then we started to make the other axis and tried the different rotations and movements. When we liked the prototype we could start to go more in a direction of how we want our robotic arm to move.






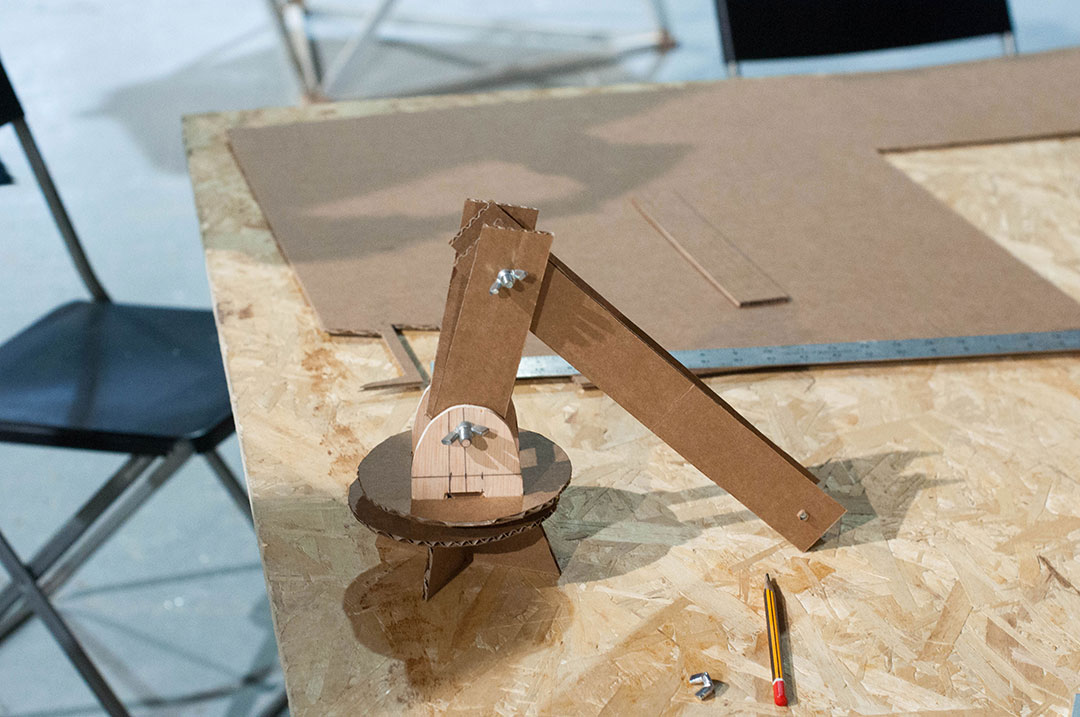
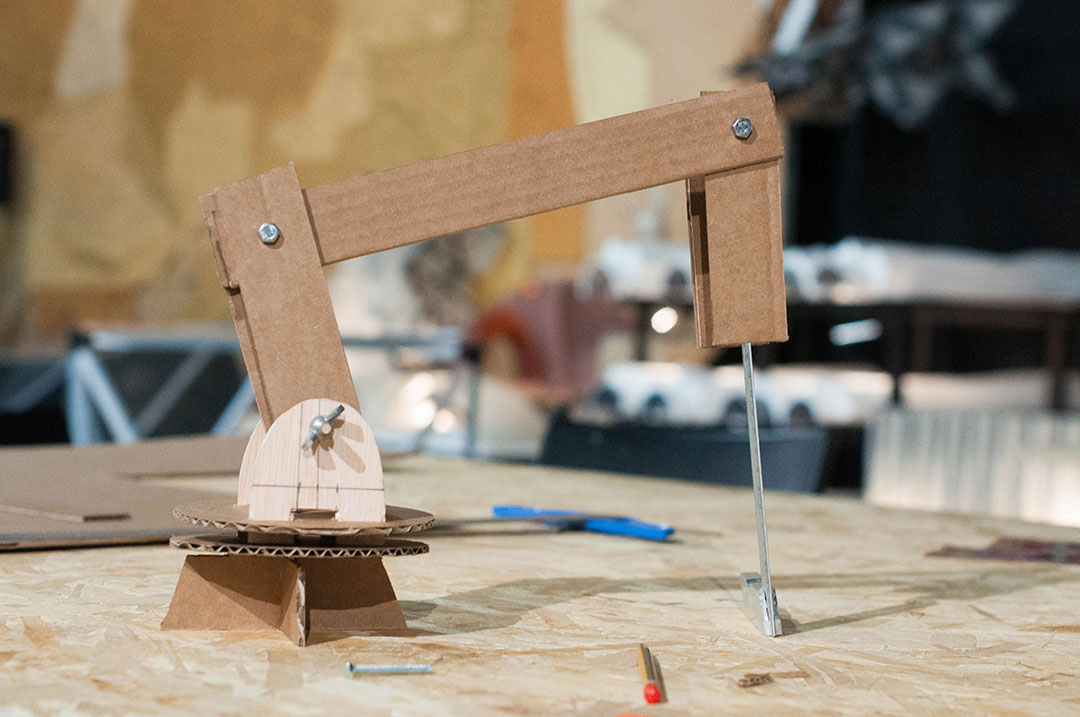
Watch the movie to see how the different axes are working ;)
Oscar
Cutting and scaling the prototype parts and made them with a cutter, cardboard and some screws.
Esteban
Cutting and scaling the prototype parts and made them with a cutter, cardboard and some screws.
Wim
Cutting and scaling the prototype parts and made them with a cutter, cardboard and some screws.