Building the machine
Overview
Last updated: 12/04/2016
Objectives 1.Build a 2 axis machineUPDATES
- We have used the board designed during the "output devices" module to control the solenoid: LINK
- We have created a repository on github with all the files to used to build the machine available here: https://github.com/wakitowaki/machine. Any future improvement will be pushed on the repo
Through a python interface, is possible to interact with the spikes of the display which are pushed from behind by a solenoid attached to the axis.
For the movement, we have decided to use the same mechanics of the Ultimaker.

3D & mechanical design
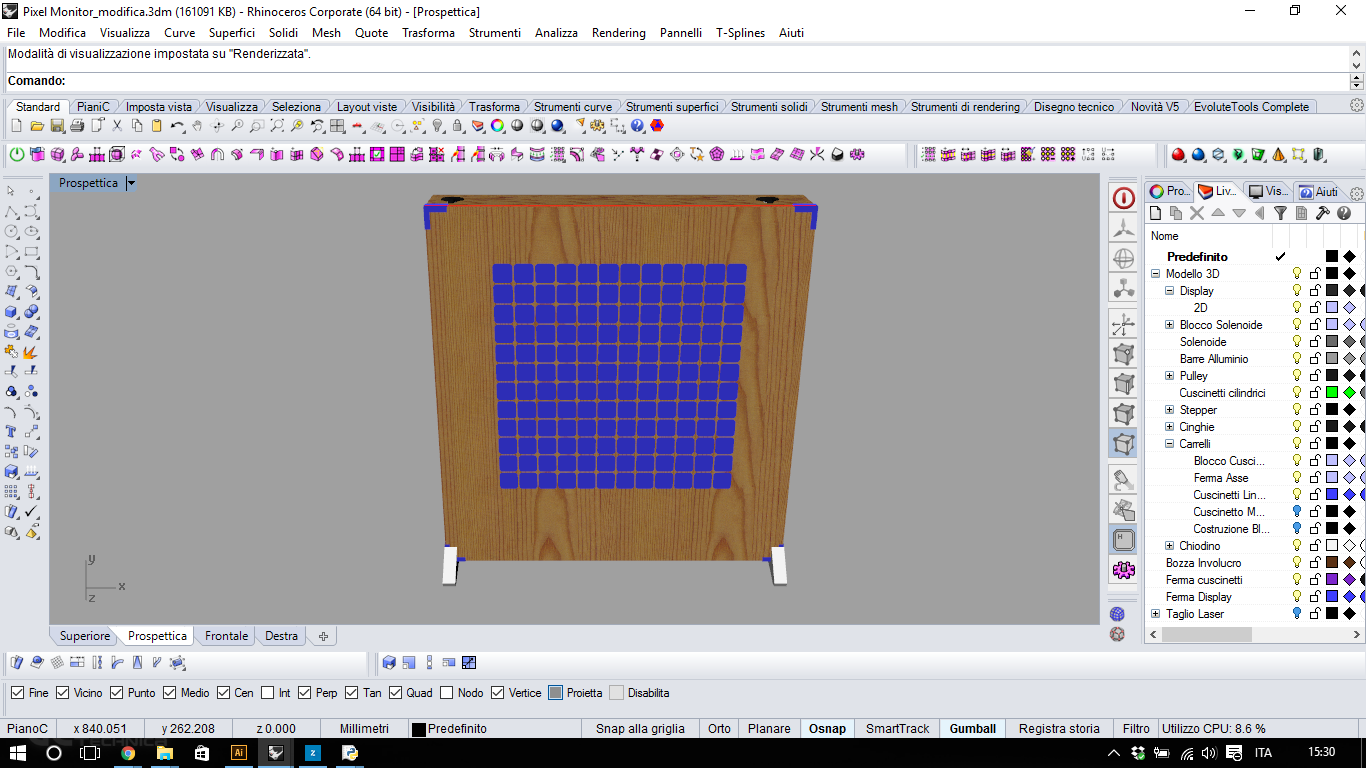
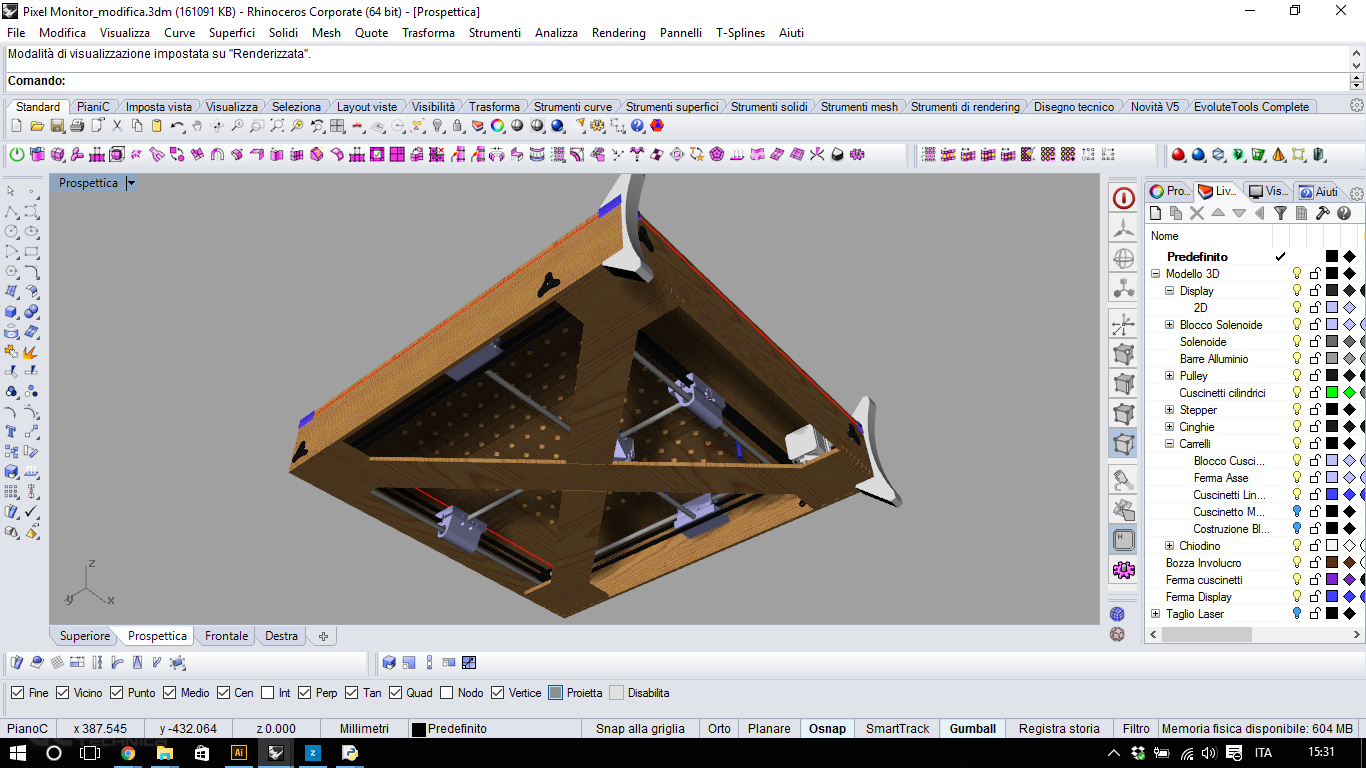
The first step for the machine building was to 3D design and assembly the model.
We have used Rhinoceros for the job.
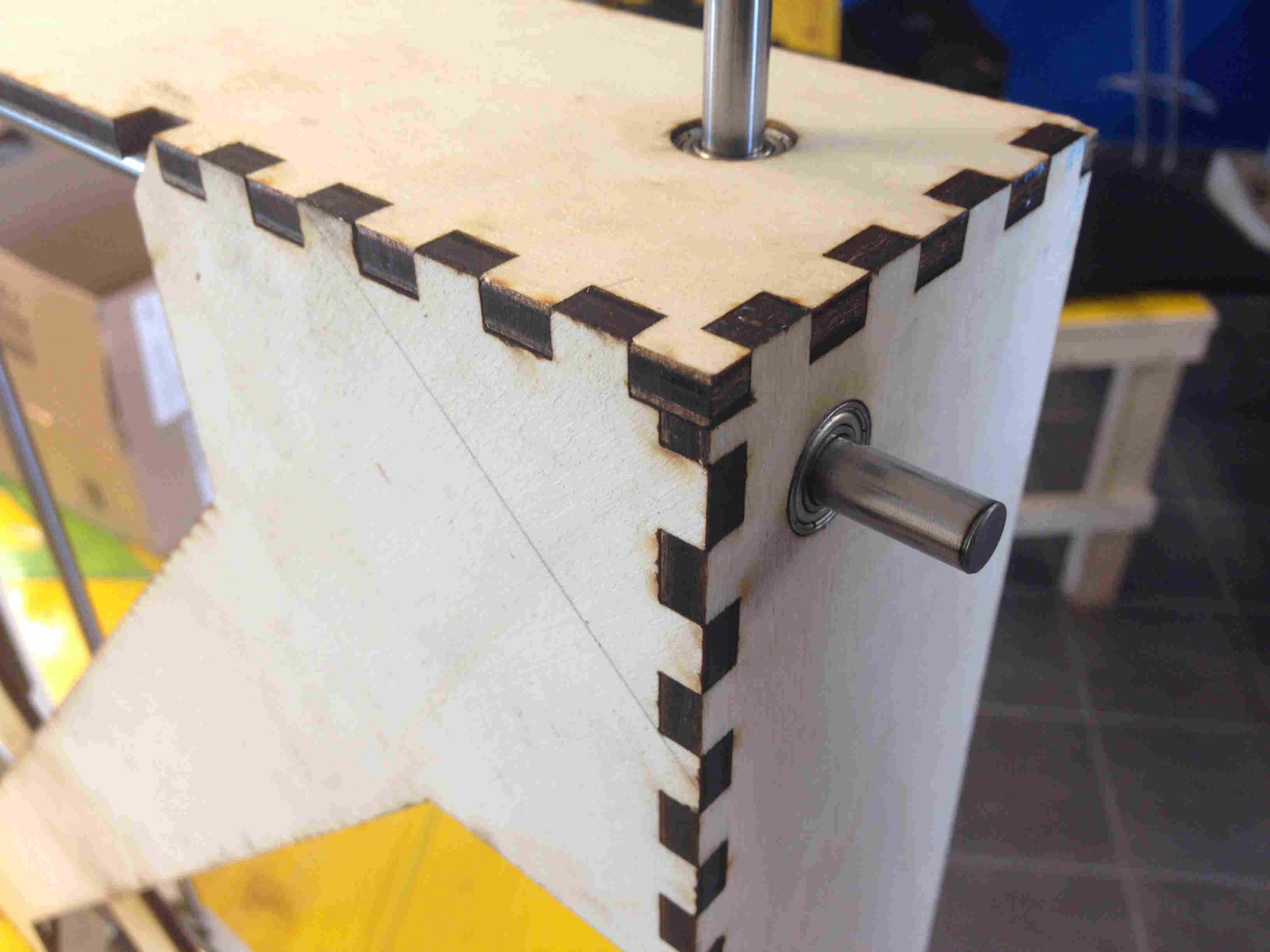
We decided to build a wooden frame to attach the movement system which is composed by two cross axis and a central holder for the solenoid.
We have cutted the frame with the laser cutter
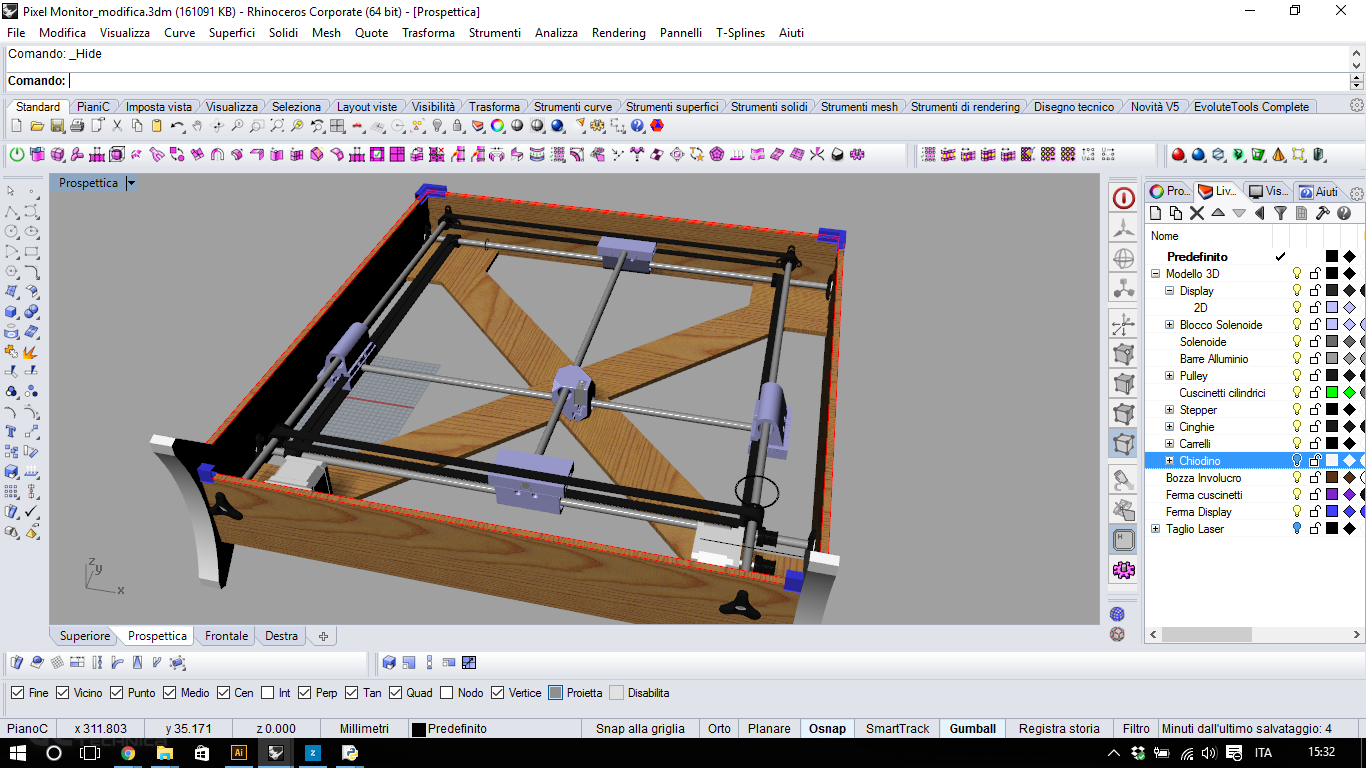
After we had renders of the machine, we've started to design the other mechanical parts.
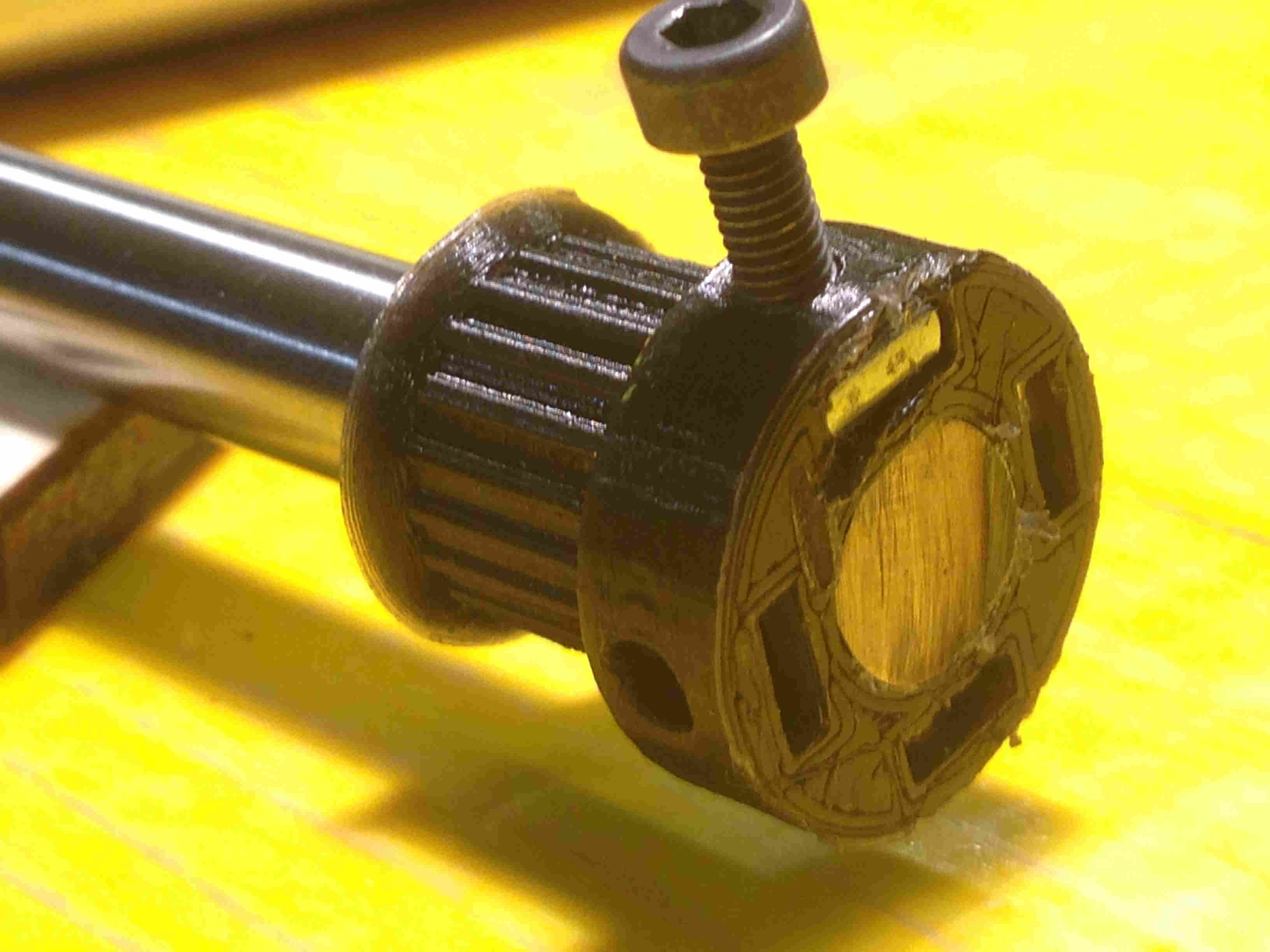
First of all, we have designed the pulleys.
We knew that we had to use a gt2 belt so we designed the theet of the pulleys to fit that dimension.
All the parts of the machine (except for the ball bearings of the frame) are 3D printed.

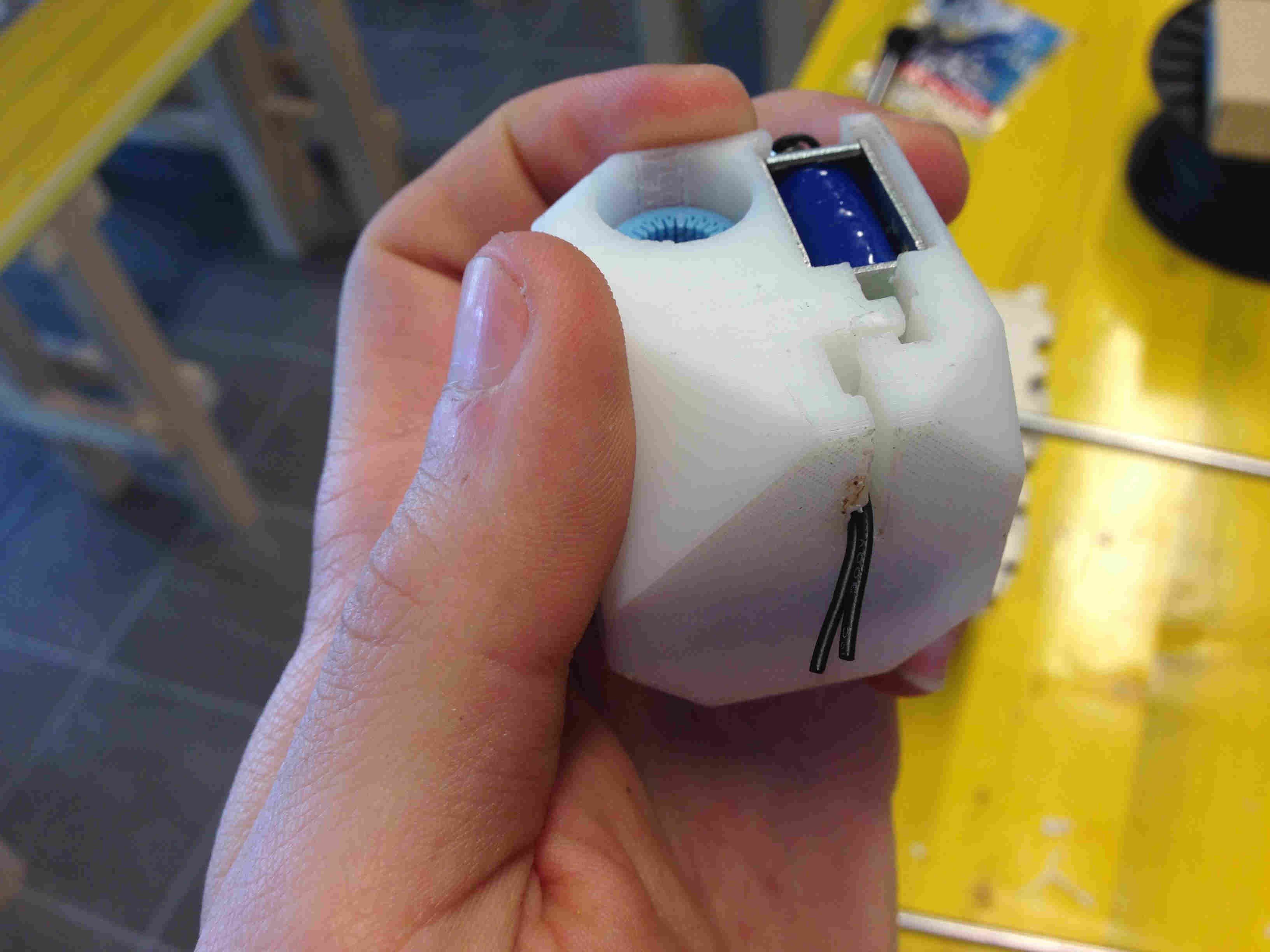
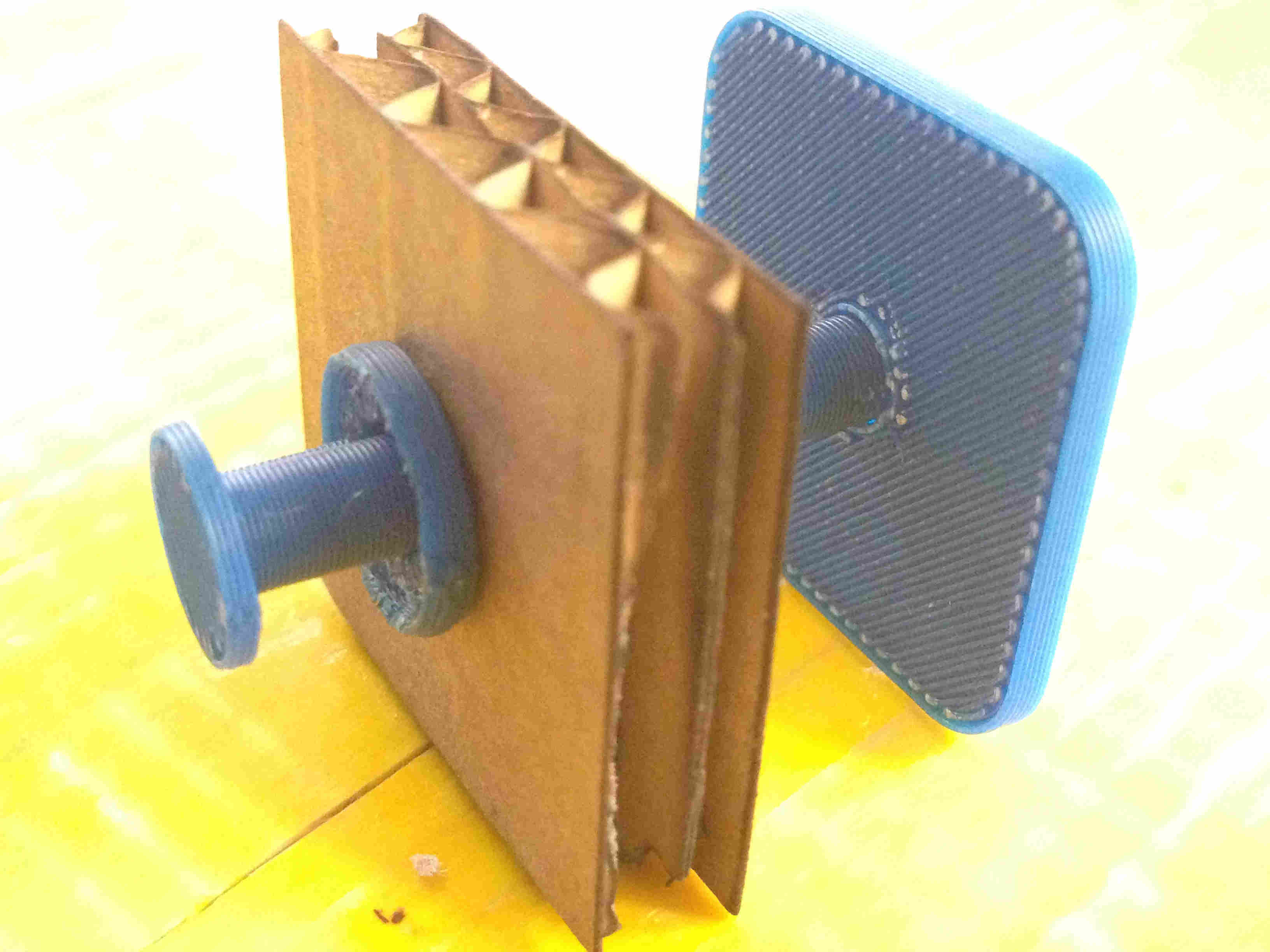
The following is the central holder for the solenoid.
This piece holds the solenoid and it is tied directly to the axis.
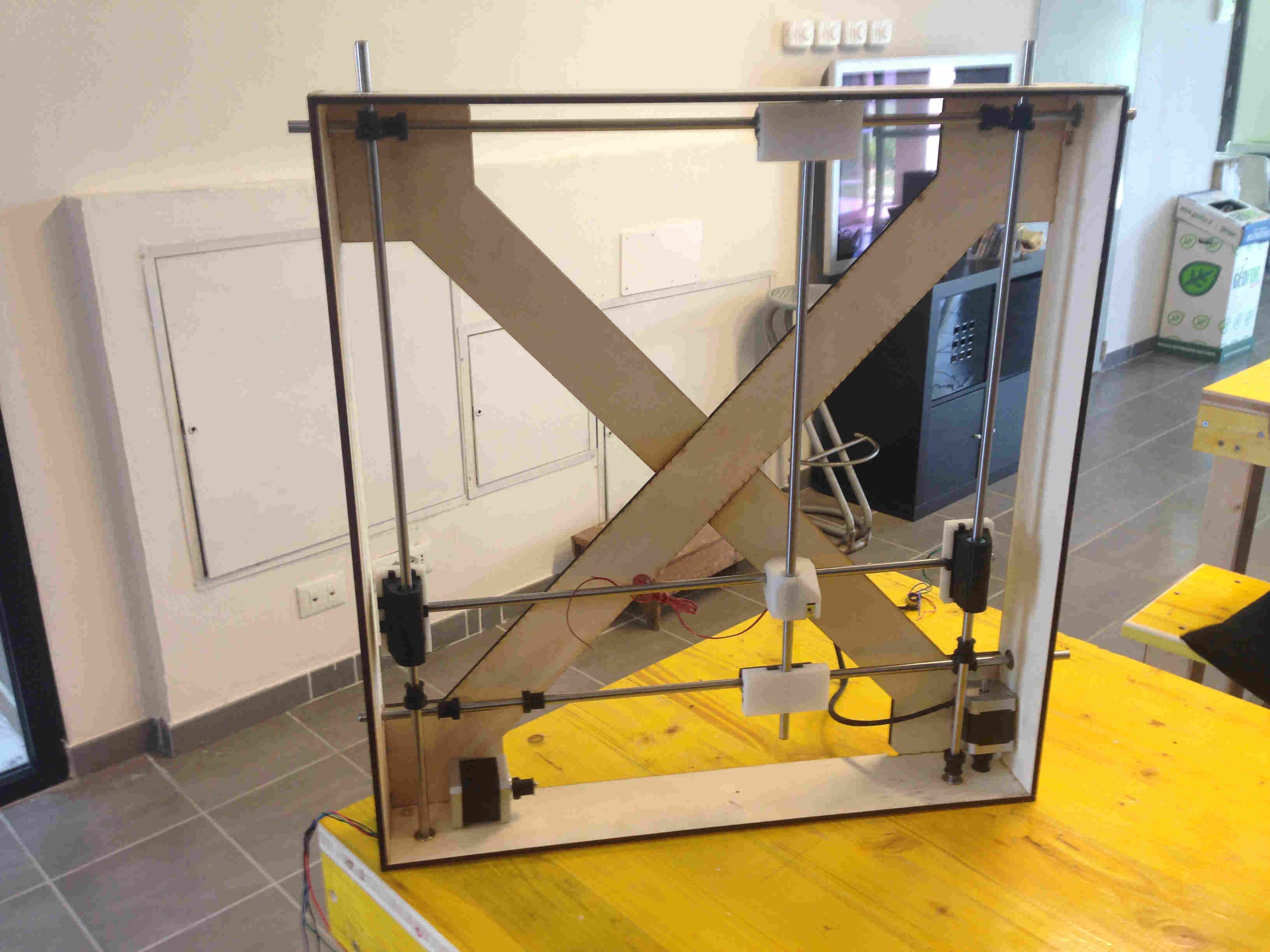
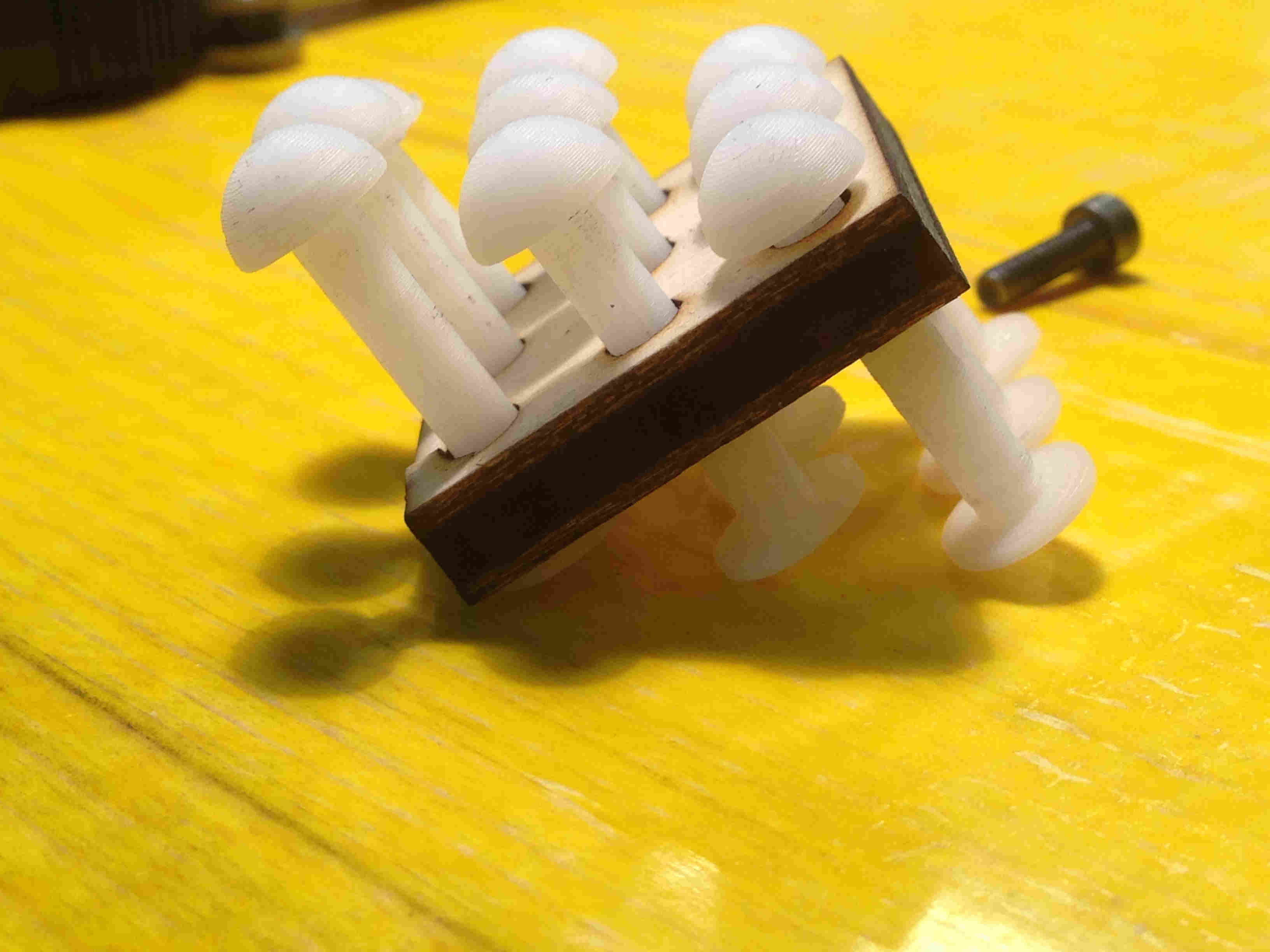
After the frame and the motors where putted in place, we have started to think about a way to design the spikes.
This is one of the first tries we did with 3d printers.
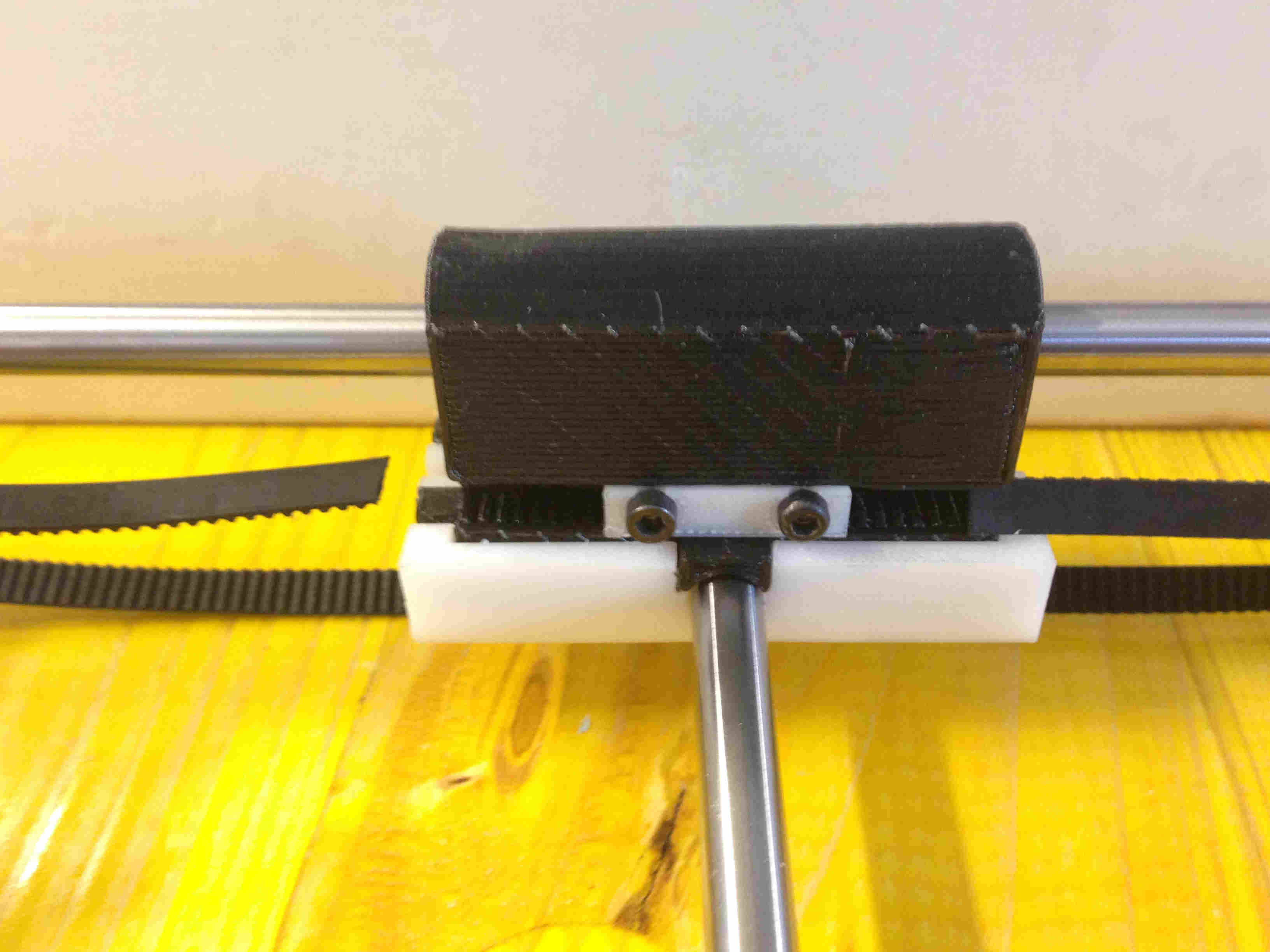
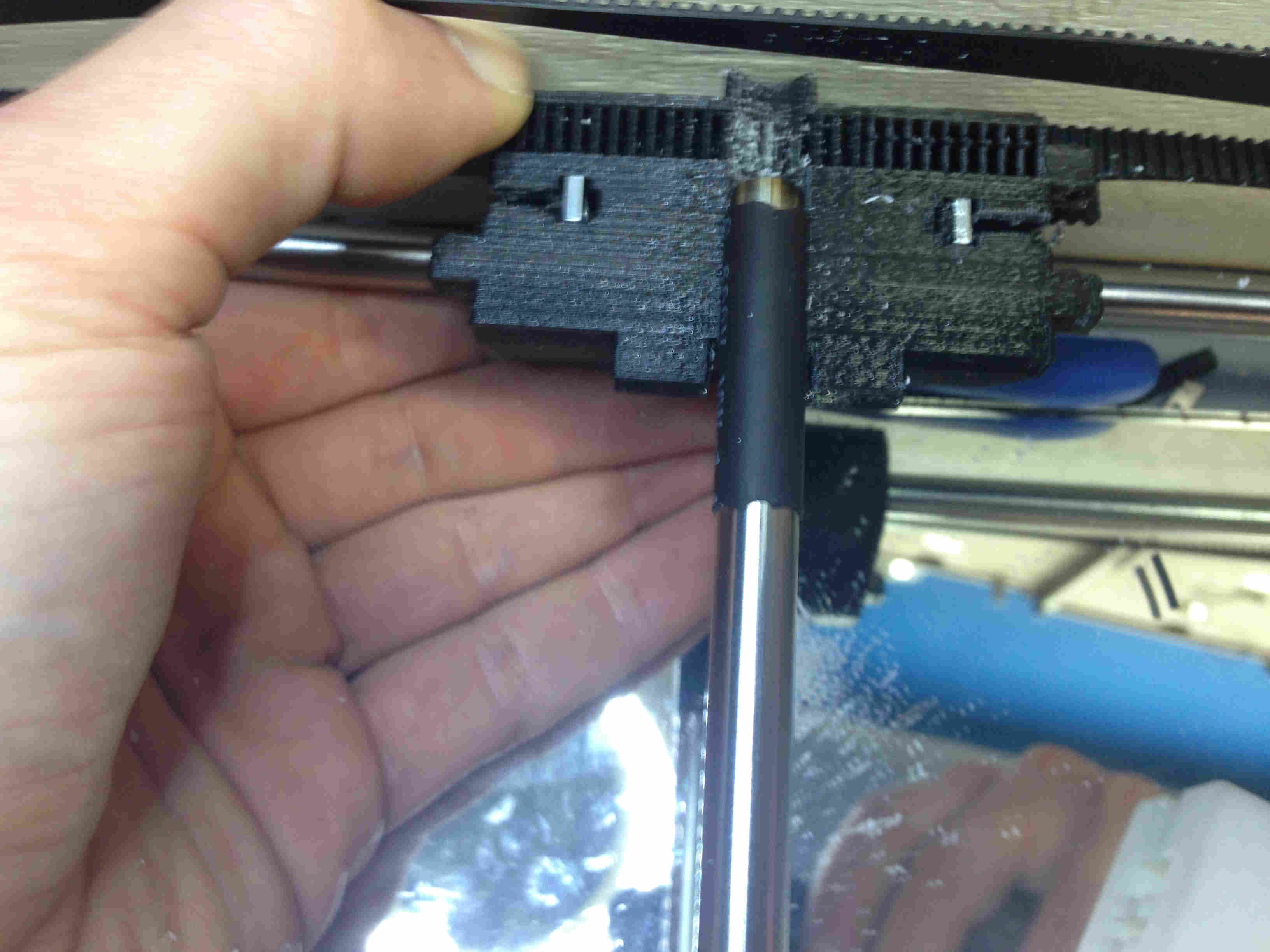
By watching the ultimaker movement system, we have designed the lateral holders for the belt in order to stick togheter the vertical and the horizontal axis.


We've also tried to realize the spikes in resin but the result was not good so we went back to the first 3D printed pieces.

Electrical hardware We have used the following pieces to build the machine:
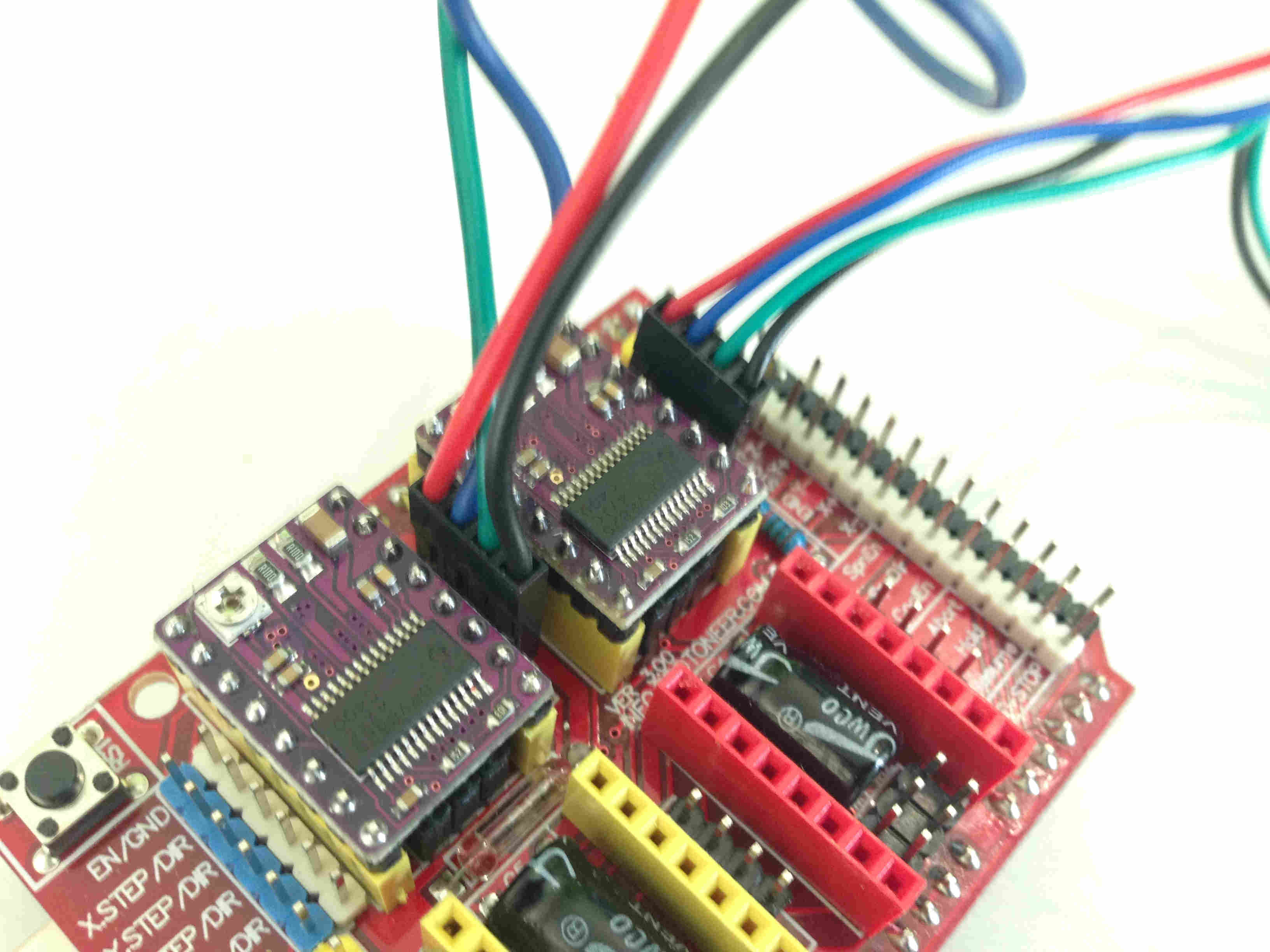
- CNC shield
- 2 stepper motors
- 5V solenoid
- NOT YET DONESatsha kit + custom board to connect the CNC board
We have used to drivers with the CNC shield, one for each axis.
We have setted the voltage across the driver empirically using the trimmer on the driver to adjust the value accordingly to the behaviour of the stepper. We see that the optimal values to avoid loss on steps was around 1V.
The solenoid is connected through the following electrical scheme:
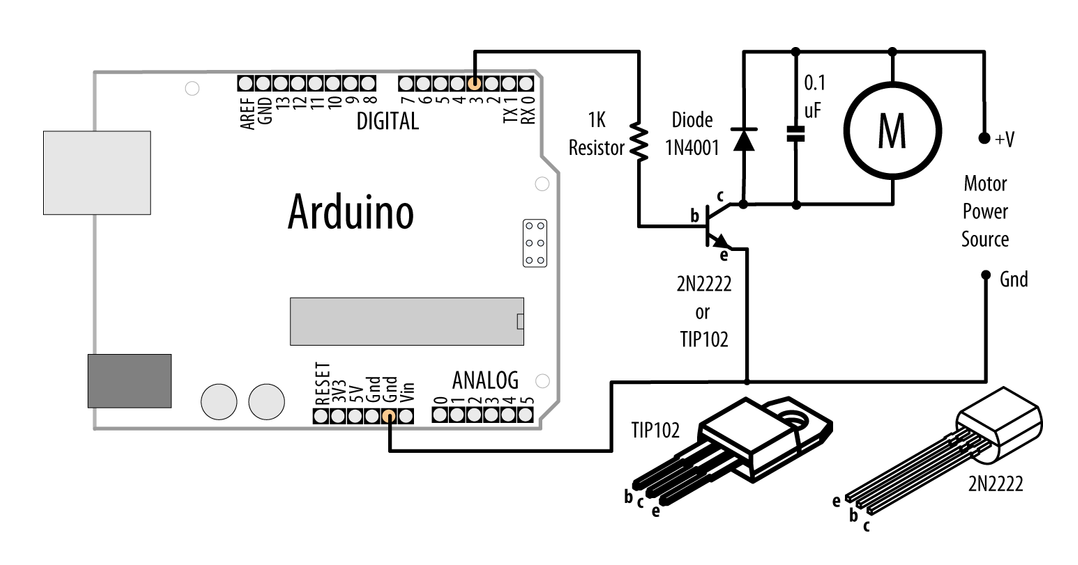
Instead of the motor, we have used a solenoid.We have used the transistor to amplify the current to 500mA. Reading (well...watching pictures because it is in chinese) the datasheet we realized that 1.1A at 5V should be the optimal value but we have tested that at 500mA it works well too.
We've tried to replace the Arduino with the satsha kit but actually it is not working. The grbl firmware on the board works perfectly but we still have to fix the electrical part in order to let the board working with the CNC shield.
Programming
To program the machine, we have followed the following workflow:- Test grbl on Arduino
- Test sending G-code files through Chili Pepper
- Use python to program a simple GUI to drive the machine
- NOT YET DONE Use python to program the "tris" game
Testing grbl on Arduino
First of all, we have followed this instructions to upload the grbl firmware on the Arduino
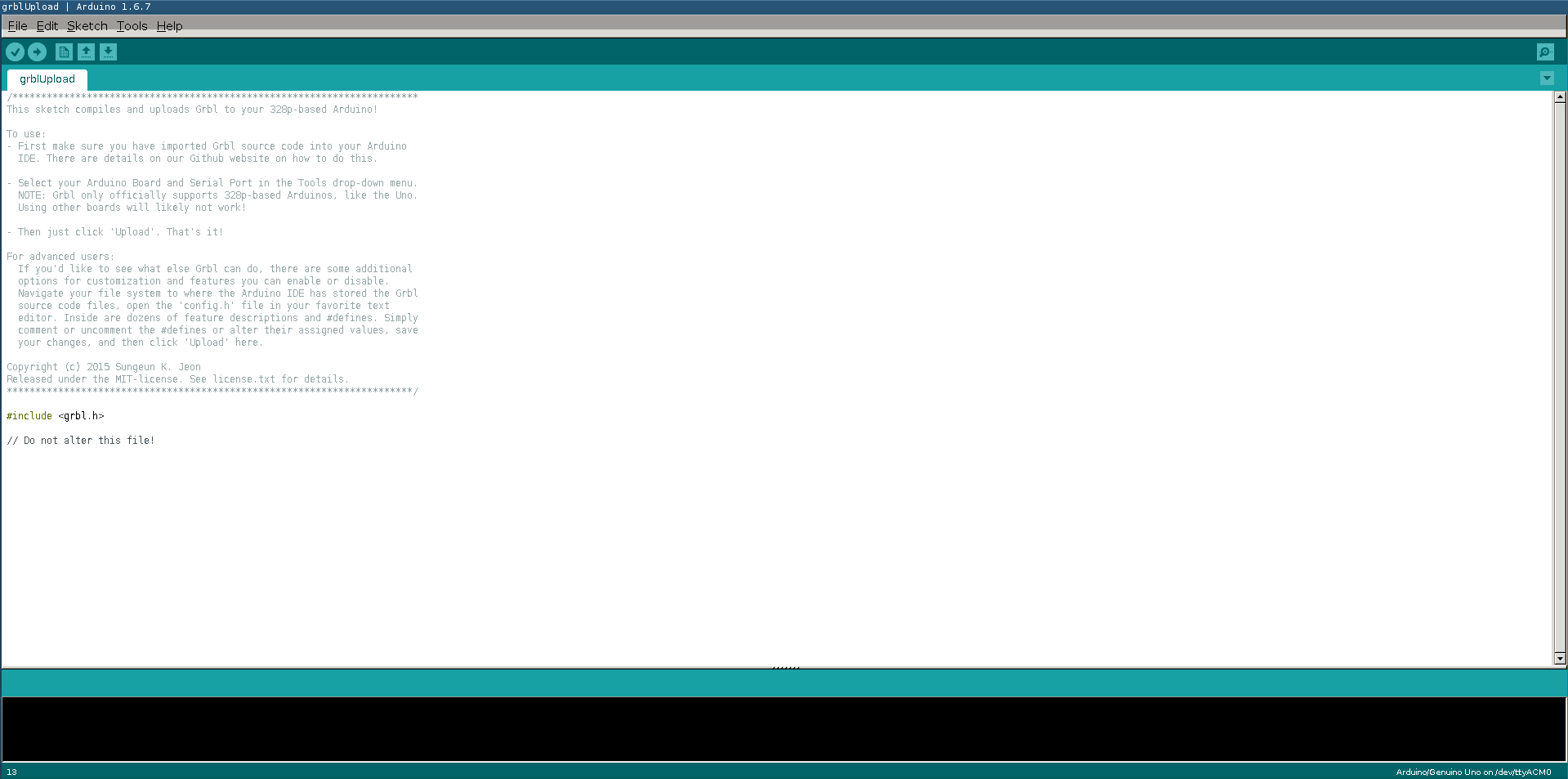
As described in the guide, is possible to view all the grbl settings by sending the "$$" code through the serial port.
After changing some values to test if everything worked fine, we moved on to test if the firmware could have handled some G-code files.
Chili Pepper
We have decided to use this web-based g-code sender to test if the firmware worked fine with Gcode files. In order to use Chili Pepper, is necessary to install a Json serial server that can be downloaded directly inside the chili pepper page
We've used the fab modules to generate the G-code file starting from a black and white image and then we have uploaded the code to Chili Pepper.
After these preliminary tests, we were sure that the firmware worked properly and we moved to python language to write our custom G-code sender.
Python
We had no previous knowledge of python so we started from the ver basics. First of all i'video looked at a simple G-code streaming interface and i've found this example really useful.#!/usr/bin/env python
"""\
Simple g-code streaming script for grbl
"""
import serial
import time
# Open grbl serial port
s = serial.Serial('COM10',115200) #change this accordingly to comport
# Open g-code file
f = open('somefile.gcode','r');
# Wake up grbl
s.write("\r\n\r\n")
time.sleep(2) # Wait for grbl to initialize
s.flushInput() # Flush startup text in serial input
# Stream g-code to grbl
for line in f:
l = line.strip() # Strip all EOL characters for streaming
print 'Sending: ' + l,
s.write(l + '\n') # Send g-code block to grbl
grbl_out = s.readline() # Wait for grbl response with carriage return
print ' : ' + grbl_out.strip()
# Wait here until grbl is finished to close serial port and file.
raw_input(" Press Enter to exit and disable grbl.")
# Close file and serial port
f.close()
s.close()This code simply reads a file line by line and sends the commando to the grbl firmware through the serial port.
We've than moved to build a better program that can fit the physical charateristics of our machine. Due to the fact that we had 144 physical spikes to make pictures, we have decided to build an interface which can represent all these elements.
We have decided to use the cross-platform library Pygame. We found a good documentation on this library full of examples and tutorials.
Our instructor, showed us how to build a program in python which can work as a virtual layer for the machine (DOWNLOAD).
import serial
import serial.tools.list_ports
import time
import cmd
class Controller:
def __init__(self, com, speed):
self.comport = com
self.comspeed = speed
def open(self):
self.serial = serial.Serial(port=self.comport,baudrate=self.comspeed,timeout=5)
def readline(self):
return self.serial.readline()
def write(self, str):
self.serial.write(str)
def send(self, buffer):
send_data = ''.join(buffer)
self.serial.write(send_data)
def sendAndWait(self, buffer):
self.send(buffer)
ch = self.serial.readline()
while ch:
if ch.strip() == 'ok':
return True
ch = self.serial.readline()
raise Exception("Command Failed")
def close(self):
self.serial.close()
class Axis:
def __init__(self, name, var, controller):
self.name = name
self.var = var
self.position = 0 # in mm
self.targetPosition = 0 # in mm`
self.controller= controller
self.ratio = 250 #(step / mm )
self.headPosition = 0
def setup(self):
buffer = []
buffer.append('%s=%d' % (self.var, self.ratio))
self.controller.send(buffer)
def move(self, destination):
self.targetPosition = destination
self.sync()
def sync(self):
buffer = []
if self.position != self.targetPosition:
if self.headPosition > 0:
buffer.append('G1 %s%d\n' % (self.name, self.targetPosition )) ## absolute
else:
buffer.append('G0 %s%d\n' % (self.name, self.targetPosition )) ## absolute
try:
print buffer
self.controller.sendAndWait(buffer)
self.position = self.targetPosition
except Exception,s:
print s
class Console(cmd.Cmd):
def __init__(self):
cmd.Cmd.__init__(self)
self.controller = None
self.x_axis = None
self.y_axis = None
def do_open(self,line):
""" Opens a serial connection to the controller"""
c = Controller("COM8", 115200)
c.open()
c.write('?')
time.sleep(1)
ch = c.readline()
while ch:
print ch
ch = c.readline()
print ch
self.controller = c
self.x_axis = Axis('X', '$100', c)
self.x_axis.setup()
self.y_axis = Axis('Y', '$101', c)
self.y_axis.setup()
def do_moveX(self, line):
""" Moves the X axis"""
print line
self.x_axis.move(int(line.strip()))
def do_moveY(self, line):
""" Moves the Y axis"""
print line
self.y_axis.move(int(line.strip()))
def do_close(self, line):
""" Closes the serial connection """
self.controller.close()
self.controller = None
def do_EOF(self, line):
self.do_close()
return True
if __name__ == '__main__':
#x_axis = Axis('X','$100', c)
#x_axis.setup()
Console().cmdloop("Enter option")
c.close()
We've used this code as a starting point and then we decided to make a less sophisticated version of the program (DOWNLOAD):
import serial
import time
import pygame
import re
import sys
def text_objects(text, font):
textSurface = font.render(text, True, WHITE)
return textSurface, textSurface.get_rect()
class Controller:
def __init__(self, com, speed):
self.comport = com
self.comspeed= speed
def opencom(self):
self.serial = serial.Serial(port=self.comport,baudrate=self.comspeed,timeout=5)
def write(self, str):
self.serial.write(str)
print('scrivo : {}'.format(str))
def readline(self):
return self.serial.readline()
def grbl_init(self):
print "init grbl"
self.serial.write("\r\n\r\n")
time.sleep(2)
self.serial.flushInput()
print "grbl READY!"
def closecom(self):
self.serial.close()
print "chiusura..."
def send_wait(self, str):
l_block = str.strip()
c.write(l_block + '\n')
grbl_out = c.readline().strip()
print (grbl_out)
class Axis:
def __init__(self, name, var, var2, var3, controller):
self.name = name
self.var = var
self.var2 = var2
self.var3 = var3
self.position = 0
self.targetPosition= 0
self.step_mm = 160 # (step/mm)
self.max_rate = 14000 # (max speed mm/min)
self.accel = 1000 # acceleration
self.headPosition = 0
self.controller = controller
def setup(self):
line = ('{}={}{}'.format(self.var,self.step_mm, "\n"))
c.send_wait(line)
line2 = ('{}={}{}'.format(self.var2,self.max_rate, "\n"))
c.send_wait(line2)
line3 = ('{}={}{}'.format(self.var3,self.accel, "\n"))
c.send_wait(line3)
print "Axis Initialized"
line4 = ('{}{}'.format("G21", "\n"))
c.send_wait(line4)
print "using mm as unit"
line5 = ('{}{}'.format("G90", "\n"))
c.send_wait(line5)
print "using absolute coordinates"
class Commands:
def __init__(self):
pass
def move_X(self,vel,posX,feed):
line = ('{}{}{}{}{}{}'.format(vel,"X",posX,"F",feed,"\n"))
c.send_wait(line)
def move_both(self, vel, posX, posY, feed):
line = ('{}{}{}{}{}{}{}{}'.format(vel,"X",posX,"Y",posY,"F",feed,"\n"))
c.send_wait(line)
def sol_on(self):
line = ('{}{}'.format("M8", "\n"))
time.sleep(0.5)
c.send_wait(line)
def sol_off(self):
line = ('{}{}'.format("M9", "\n"))
c.send_wait(line)
# Define some colors
BLACK = (0, 0, 0)
WHITE = (255, 255, 255)
GREEN = (0, 255, 0)
RED = (255, 0, 0)
# Define offset
OFFSET = 30
# This sets the WIDTH and HEIGHT of each grid location
WIDTH = 20
HEIGHT = 20
# This sets the margin between each cell
MARGIN = 5
# Create a 2 dimensional array. A two dimensional
# array is simply a list of lists.
grid = []
for row in range(12):
# Add an empty array that will hold each cell
# in this row
grid.append([])
for column in range(12):
grid[row].append(0) # Append a cell
# Initialize pygame
pygame.init()
# Set the HEIGHT and WIDTH of the screen
WINDOW_SIZE = [305, 365]
screen = pygame.display.set_mode(WINDOW_SIZE)
# Set title of screen
pygame.display.set_caption("Steam Machine v1.0")
# Loop until the user clicks the close button.
done = False
# Used to manage how fast the screen updates
clock = pygame.time.Clock()
if __name__ == '__main__':
c = Controller("COM7", 115200)
c.opencom()
c.grbl_init()
#time.sleep(5)
#grbl_out = c.readline().strip()
#print(grbl_out)
x_axis = Axis('X','$100','$110','$120',c)
x_axis.setup()
y_axis = Axis('Y','$101','$111','$121',c)
y_axis.setup()
d = Commands()
# -------- Main Program Loop -----------
while not done:
for event in pygame.event.get(): # User did something
if event.type == pygame.QUIT: # If user clicked close
done = True # Flag that we are done so we exit this loop
elif event.type == pygame.MOUSEBUTTONDOWN:
# User clicks the mouse. Get the position
pos = pygame.mouse.get_pos()
# Change the x/y screen coordinates to grid coordinates
column = pos[0] // (WIDTH + MARGIN)
row = pos[1] // (HEIGHT + MARGIN)
print("Click ", pos, "Grid coordinates: ", row, column)
#Tracking changes of grid elements status
try:
#state 1-->0 do nothing
if grid[row][column] == 1:
grid[row][column] = 0
#State 0-->1, move the machine
elif grid[row][column] == 0:
grid[row][column] = 1
d.move_both('G0',OFFSET*column,OFFSET*row,'500')
d.sol_on()
time.sleep(.3)
d.sol_off()
except:
pass
# Set the screen background
screen.fill(BLACK)
#pygame.draw.circle(screen, BLUE, (300, 50), 20, 0)
#pygame.draw.rect(gameDisplay, red,(550,450,100,50))
#draw the send button
width, height = pygame.display.Info().current_w, pygame.display.Info().current_h
pygame.draw.rect(screen, GREEN, [(width/2)-50, height-60, 100, 50])
#text inside the button
smallText = pygame.font.Font("freesansbold.ttf",20)
textSurf, textRect = text_objects("G-CODE!", smallText)
textRect.center = ( (width/2), height-30 )
screen.blit(textSurf, textRect)
# Draw the grid
for row in range(12):
for column in range(12):
color = WHITE
if grid[row][column] == 1:
color = GREEN
pygame.draw.rect(screen,
color,
[(MARGIN + WIDTH) * column + MARGIN,
(MARGIN + HEIGHT) * row + MARGIN,
WIDTH,
HEIGHT])
# Limit to 60 frames per second
clock.tick(60)
# Go ahead and update the screen with what we've drawn.
pygame.display.flip()
# Be IDLE friendly. If you forget this line, the program will 'hang'
# on exit.
pygame.quit()
c.closecom()
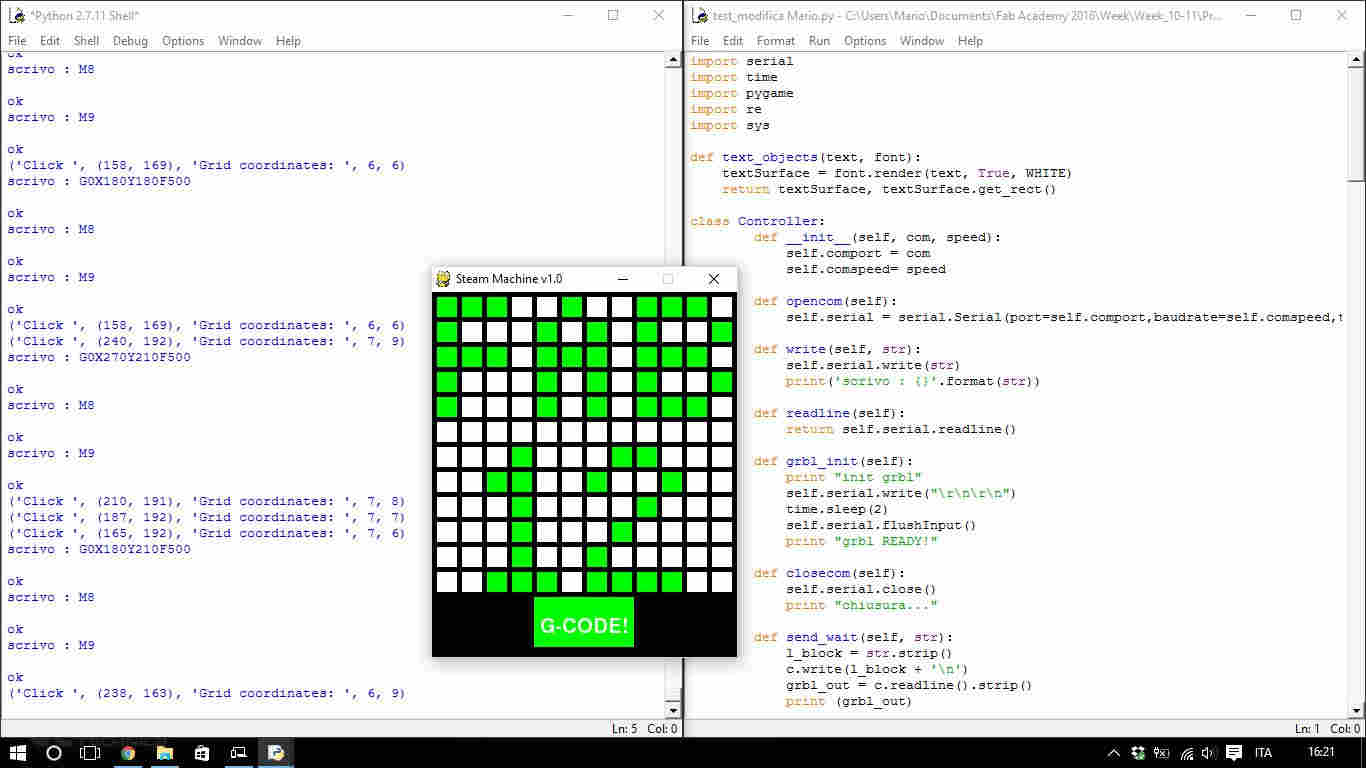
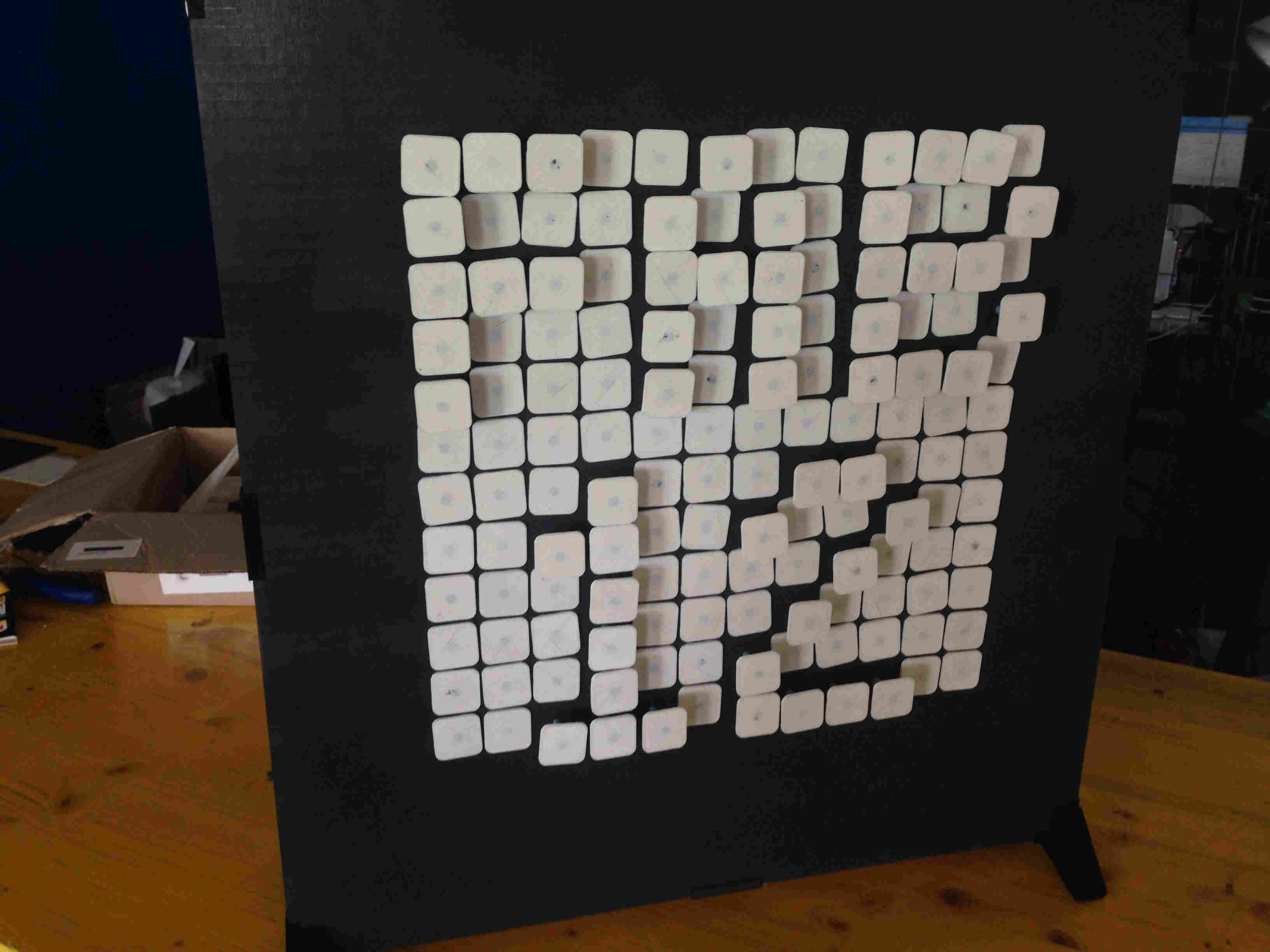
With this code, we were able to address the solenoid to each position of our grid and to activate each spike.
By clicking on an element of the grid, the correspondent physical elemnt comes out from the grid through the pressure of the solenoid.
Table of Content
Resources
- [1] Download Files