
In this week I made dc motor control board h-bridge.
Since I try to make something include DC motor in it.
my instructor said "Yousun you have to put 3 h-bridges to gather to move brush-less motor!"
So I did this.
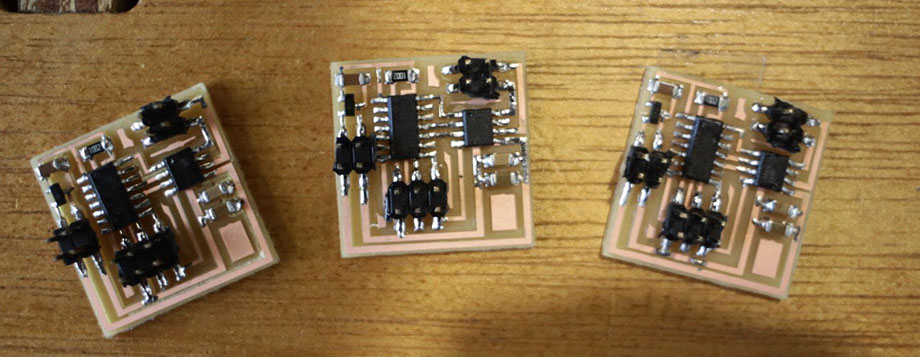
3 H-bridges to gather!
It wasn't what he meant... so I just try to move brushed motor.
I think I can make sort of frog with this little friend.. :)
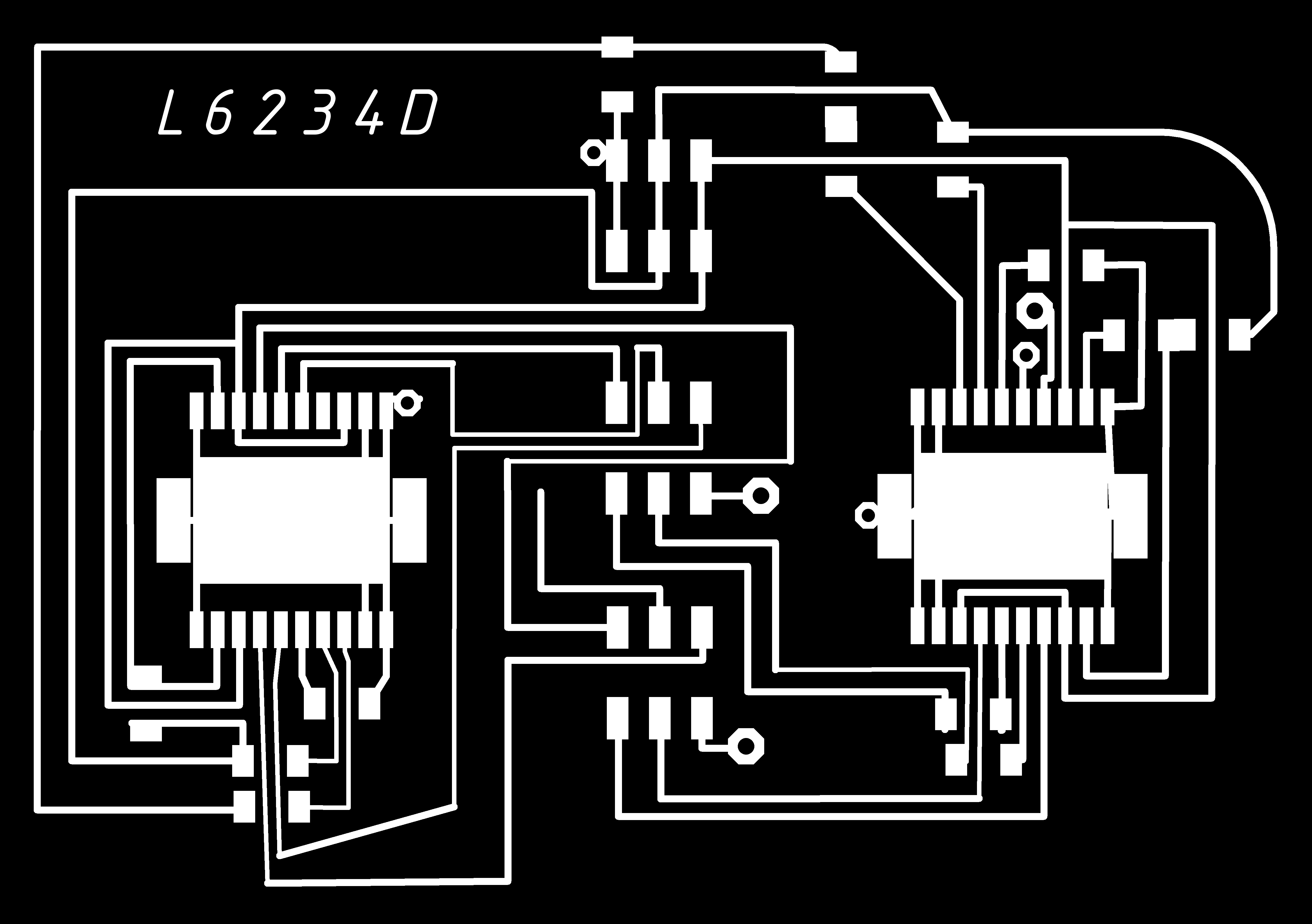
This is the Brushless DC motor control board. it has two L6234d h-bridges
so, it can control two bldc motor at the same time
you can check the video it controls motor with mpu6050 here.
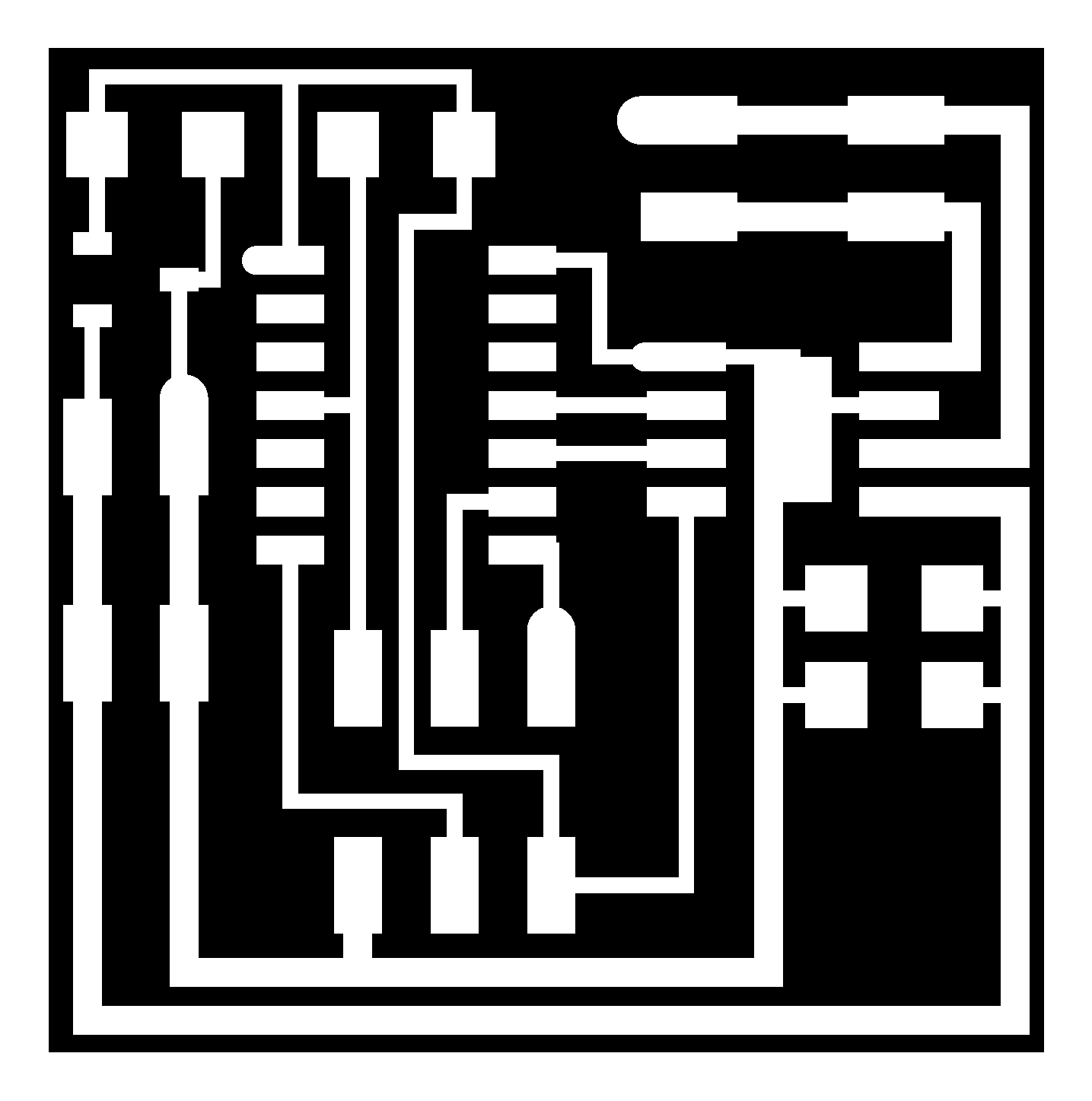
Click the image to download original png file.
You will need this file to make it work!
This video is I'm using mpu6050 to test out my BLDC Board. which is for my final project.
This video is I'm using mpu6050 to test out my BLDC Board. which is for my final project.
This is just L6234D shield can hold two of them and have simple connectors to Satshkit and bldc motor and battery. everything you need.
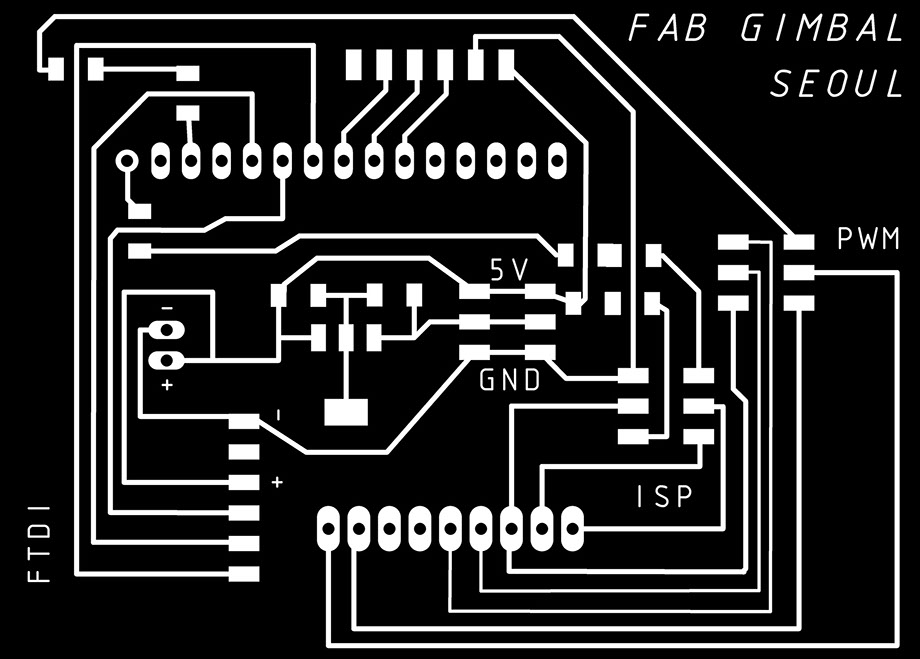
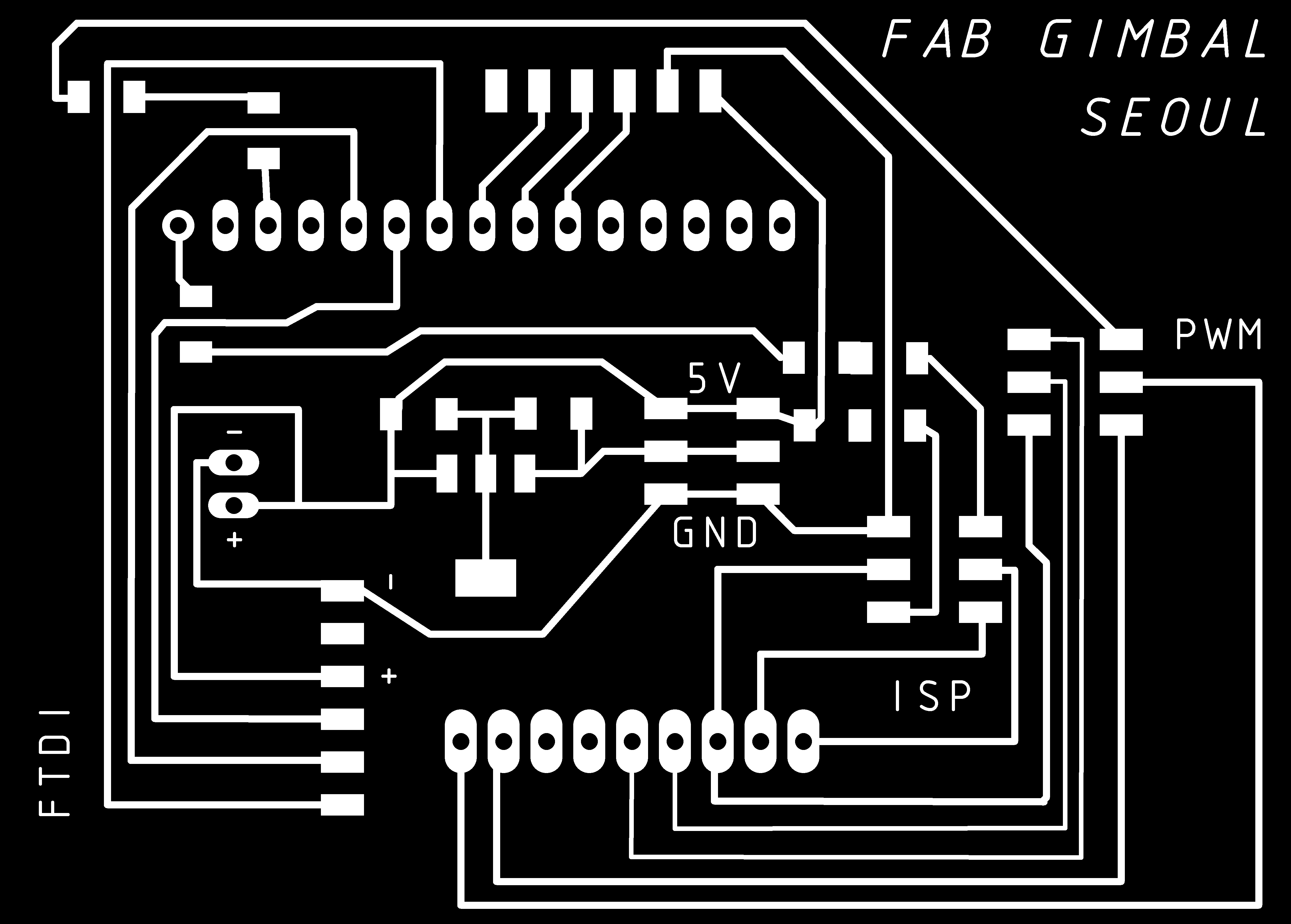
Motor Shield Trace / Holes / Outline <<<<<<<<<<<<< If you want to make same stuff just click and download this files.
{kind=link}
{kind=link}
This is a shield goes top of the Satshakit. Through FTDI connector you can adjust the speed of motor.
{kind=link}
{kind=link}
{kind=link}
This is the software that I use for control and connect with mpu6050.
The thing is I can't use the accelerometer I made in input device assignment.
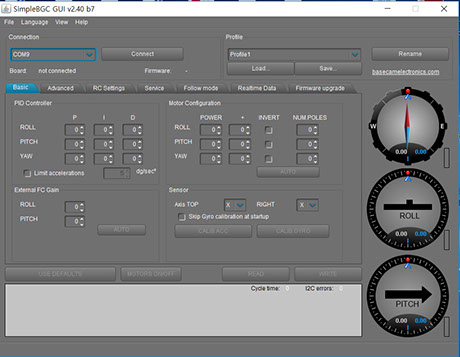
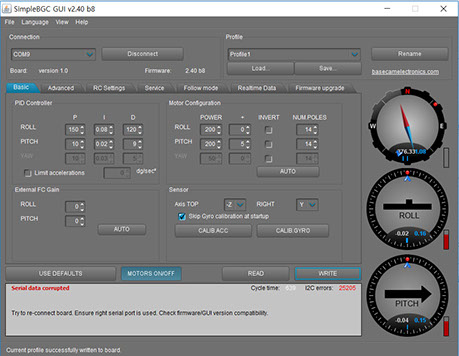
Here is the software and firm ware to flash your Satshakit as a gimbal control board is cool! isn't it?
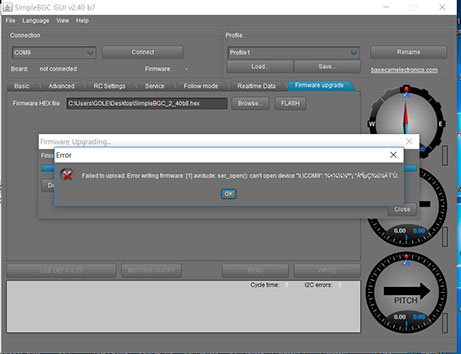
You have to check your ftdi connectors are fully working or not also check the version of the hex file there is two version one is for original board from Alexmos manufacturer the other one is for copied board just as mine.
File that I attach here is for copied one.
because I am using attiny168 it only can handled by 8bit control panel. so it is less cooler than 32 but version.
These are schematics.
Back to home