about
one.principles and practices
two.computer-aided design
three.computer-controlled cutting
four.electronics production
five.3d scanning & printing
six.electronics design
seven.computer-controlled machining
eight.embedded programming
nine.mechanical design
ten.machine design
eleven.input devices
twelve.molding & casting
thirteen.output devices
fourteen.composites
fifteen.networking & communications
sixteen.interface & app. programming
seventeen.applications & implications
eighteen.invention, property & income
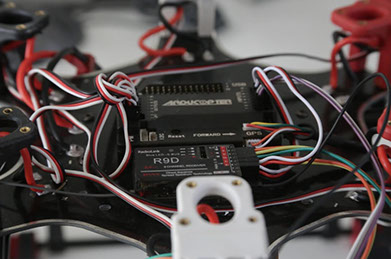
In its traditional configuration,this hardware includes a radio receiver that is associated with an RF remote control operated manually. In the prototype system, this control mechanism is used only during takeoff and landing, because once started the flight, the autopilot implemented in the RPI takes command of the vehicle.
Encoded signals by radio frequency receiver are sent through channels to Arducopter which interprets them according to a mapping with the different axes of movement of the vehicle. In the prototype configuration channels and corresponding movement axes they are mapped as follows:
CHANNEL NUMBER
CH1
CH2
CH3
MOVEMENT AXIS
THROTTLE
PITCH
YAW
final project
god.