In this assignment I had to make two shield, I made it because I needed it for the mechanical design, I made the gestalt node and a Shield to get together the Arduino mega and the CNC Shield.
Gestalt Node
The gestalt node you can download and mechanize, I downloaded the file, you can find it here.
Nadya Gestalt
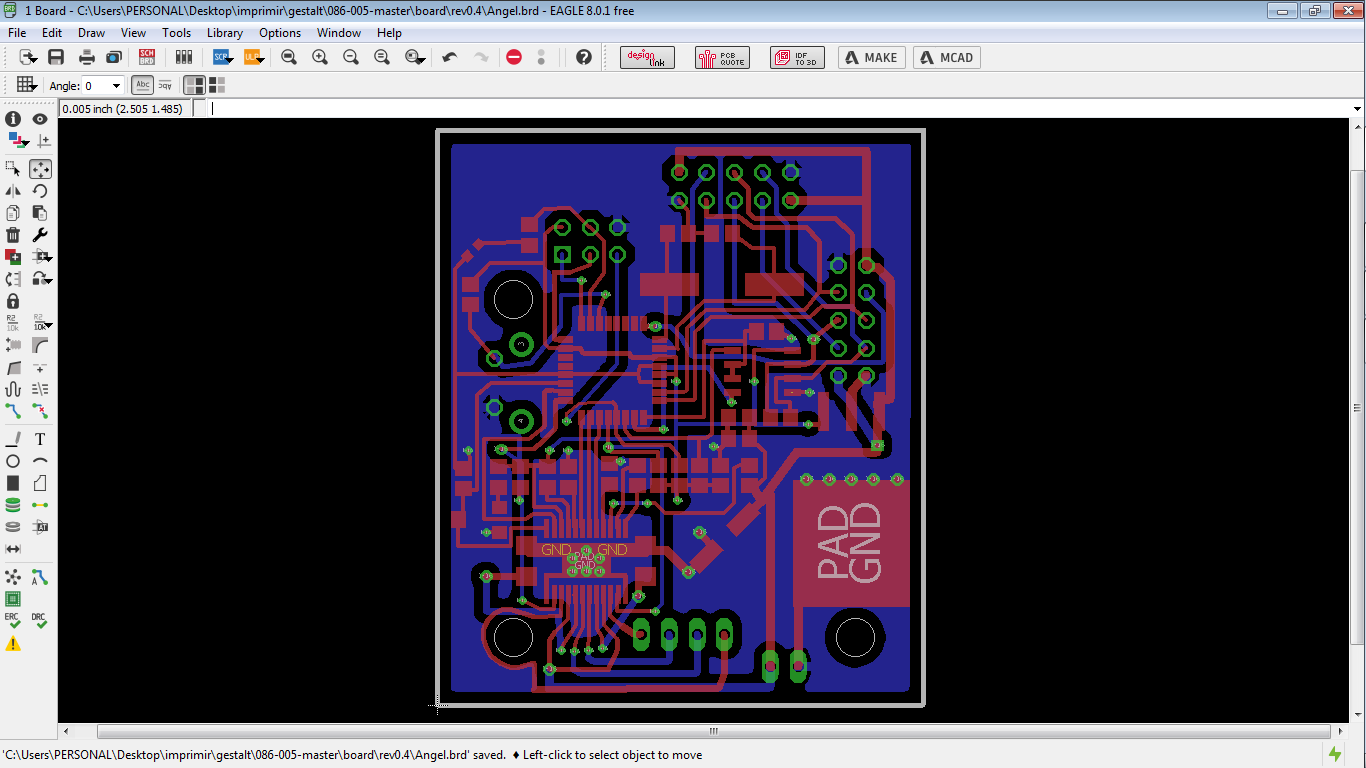
I used the version 4 of Nadya, you justly have to download and open the board folder, there you can find four versions of gestalt node, I used the version 4, this files you can open with Eagle PCB, I opened the file and change the position of some lines. I made it because I do not like some lines, it is like me, the design is really good, but I wanted than the PCB had a little of me.
you can find all the files on the final of this page.
2)Explained problems and how you fixed them
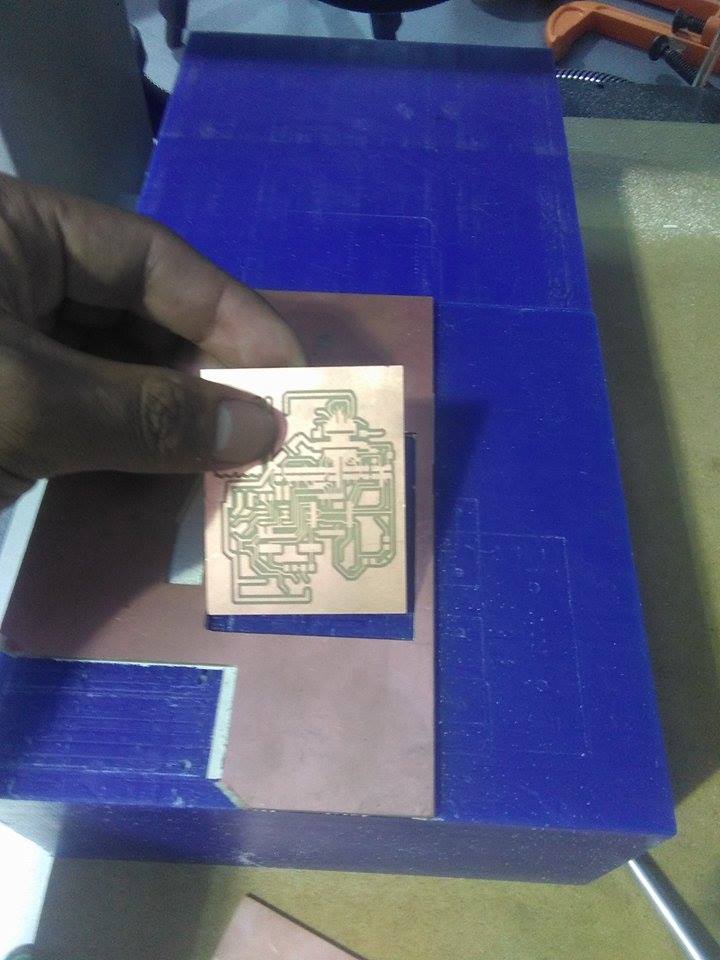
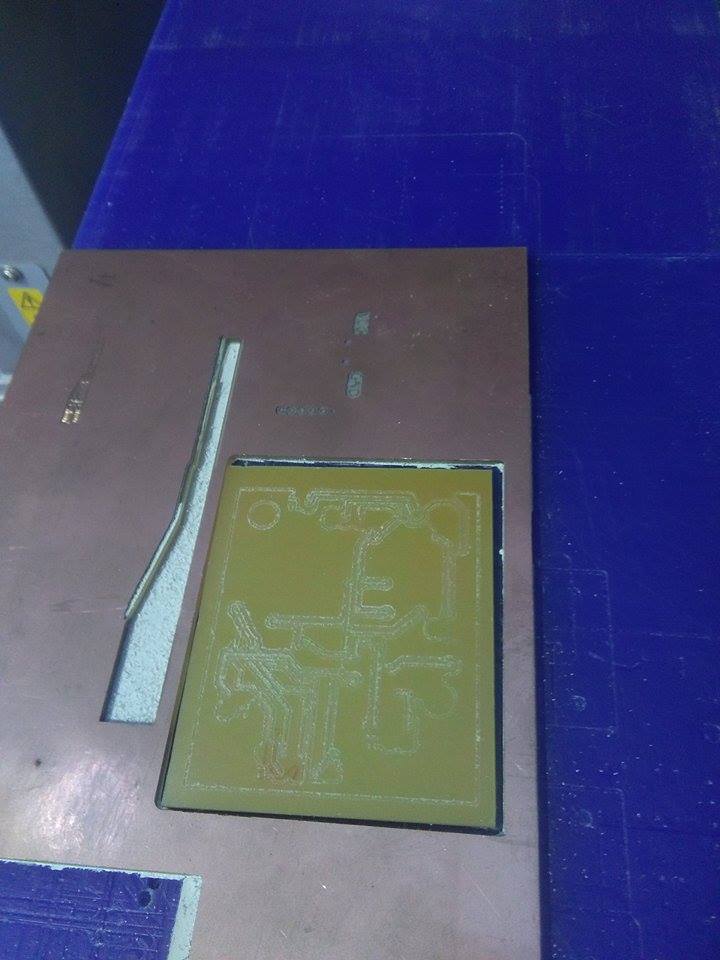
I make some proves to do the Gestalt node, I broke a milling and I had a fail on mi design, here the photos.
I could not finish because we do not have the motor driver on the fab lab.
We will resolve this problem, review the next assignment.
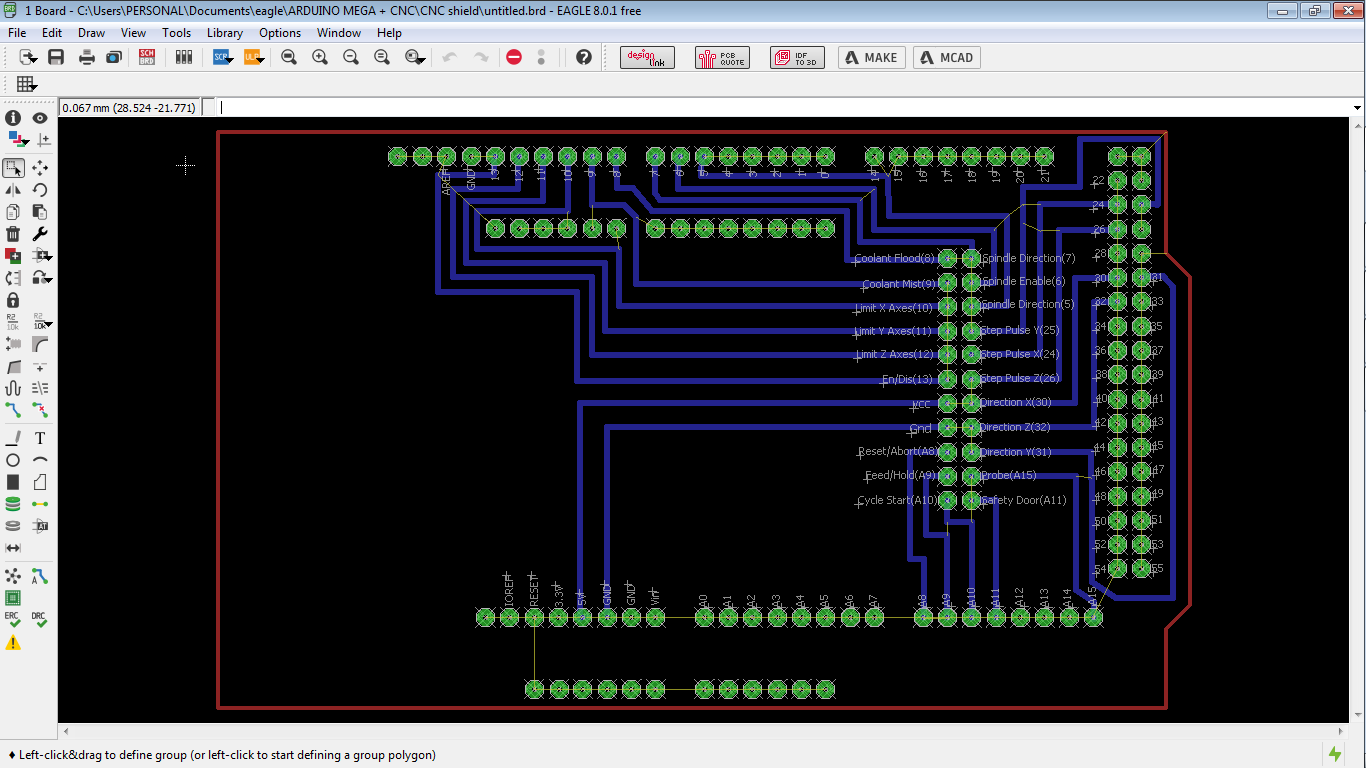
It is the design of my Shield for the CNC Arduino Uno to apply on my Arduino mega.
Learning outcomes:
1) Demonstrate workflows used in circuit board design and fabrication
Here hero photos
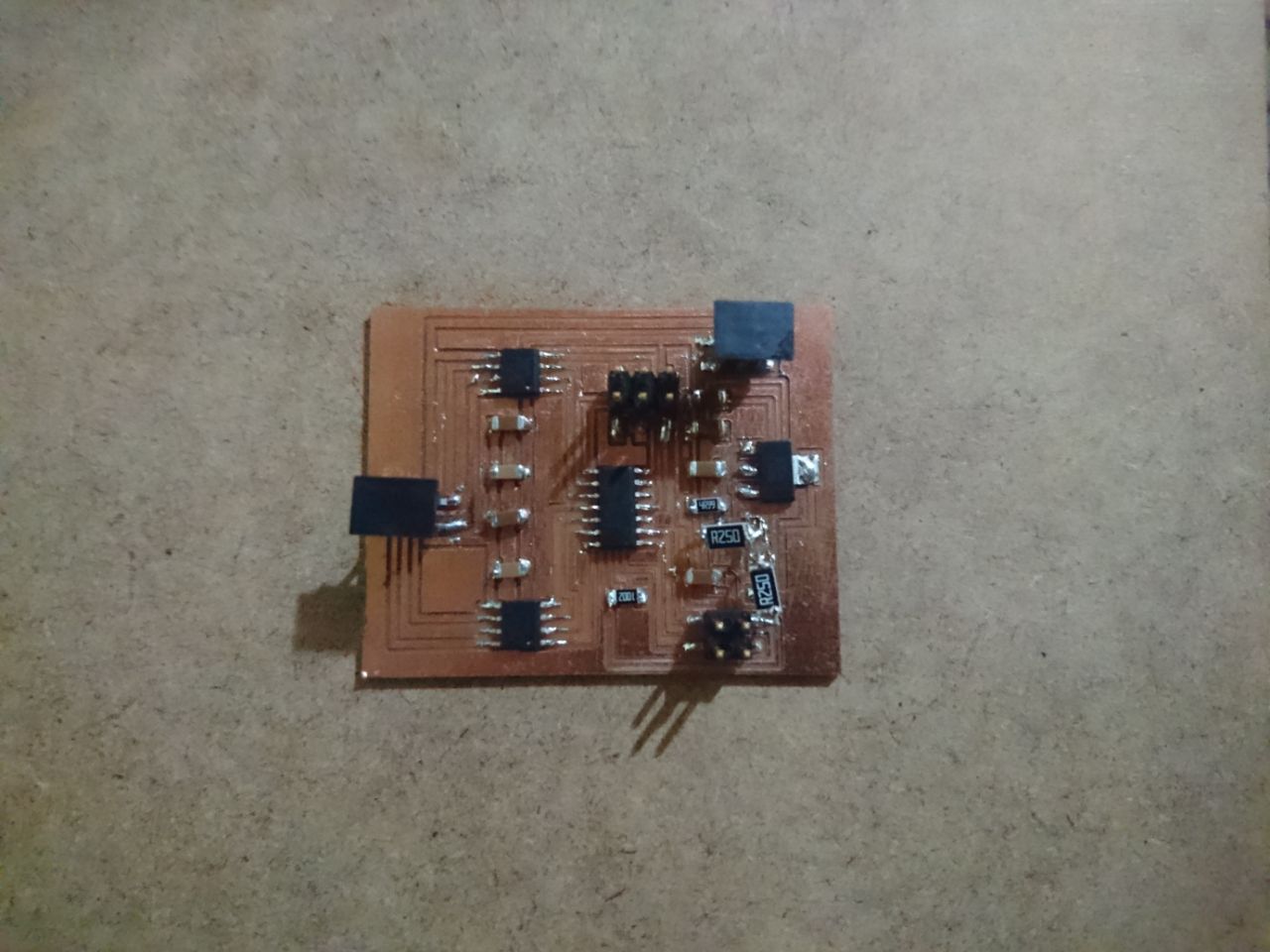
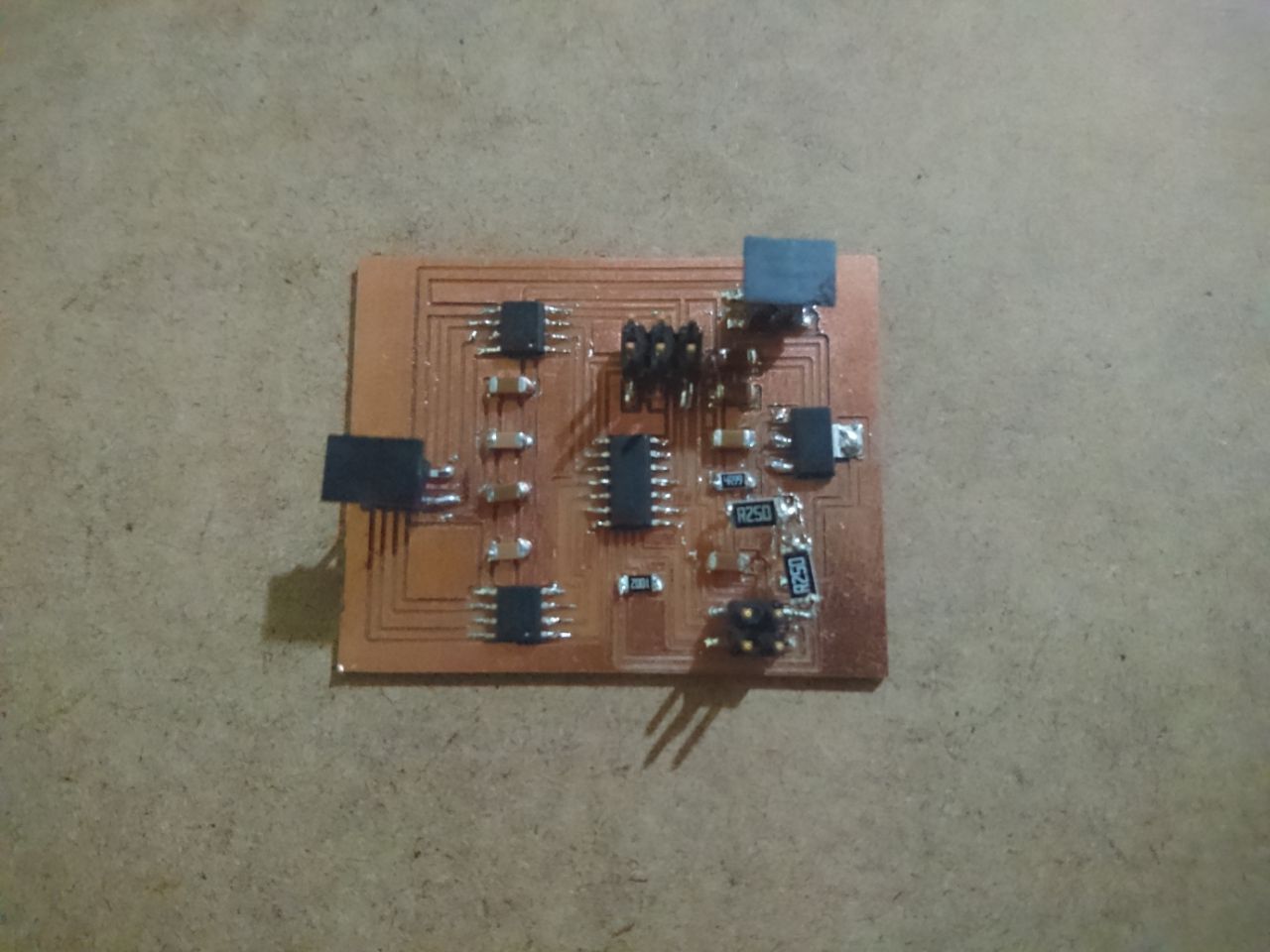
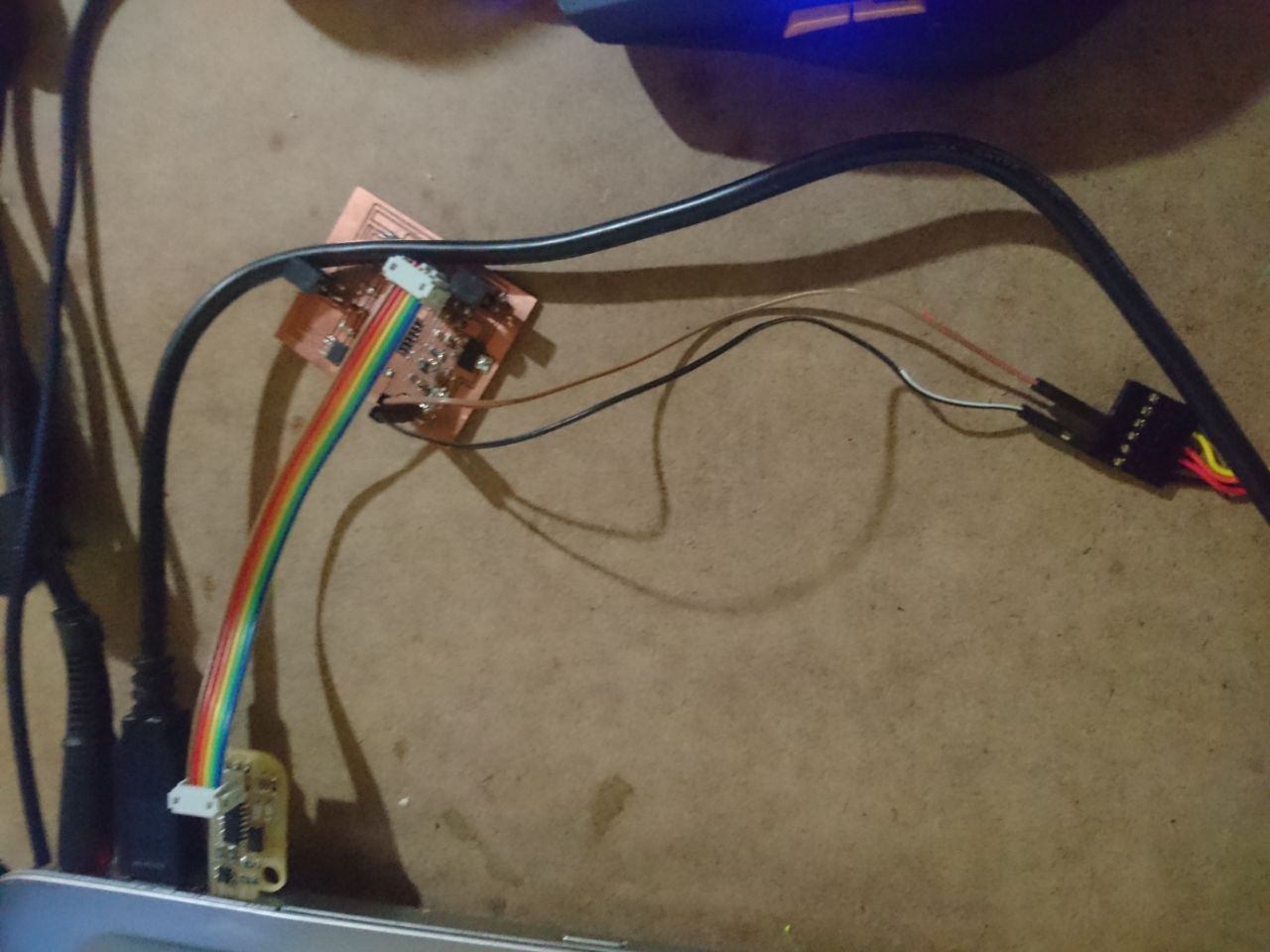
Also I worked in the stepper motor control. I used the PCB of Bipolar Stepper motor, this file you can find this information on the: 2017 Schedule, in the Mar 29: output devices.
There is the PCB and programing the PCB with the Fabisp.
2)Implement and interpret programming protocols
I am applying the serial communication to burn bootloaders. I use the USB to communicate with the board; it is a kind of communication. I use the software Arduino. IDE to generate the code.
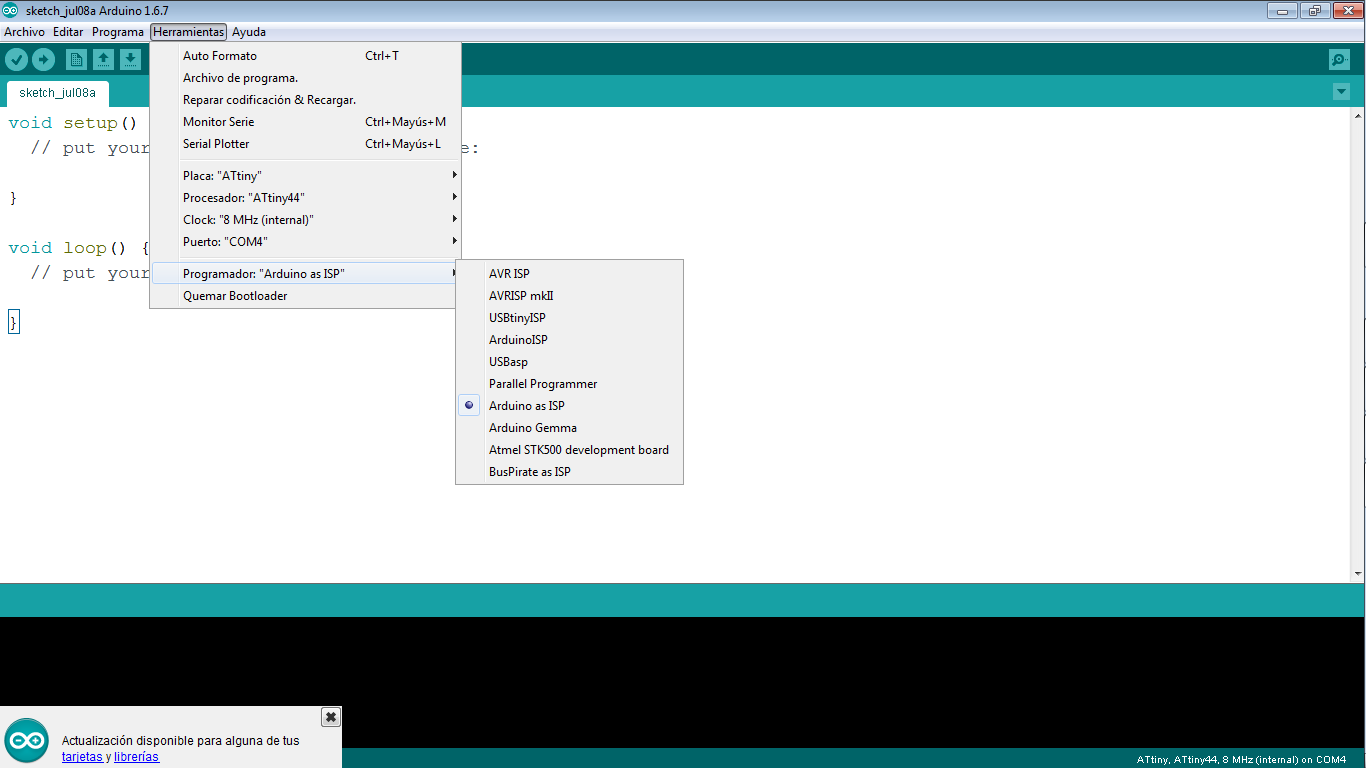
To program my PCB I need to burn bootloader, use the tool configuration in arduino.Ide software. then you have to press burn bootloaders. I used my fabISP to burn bootloader.
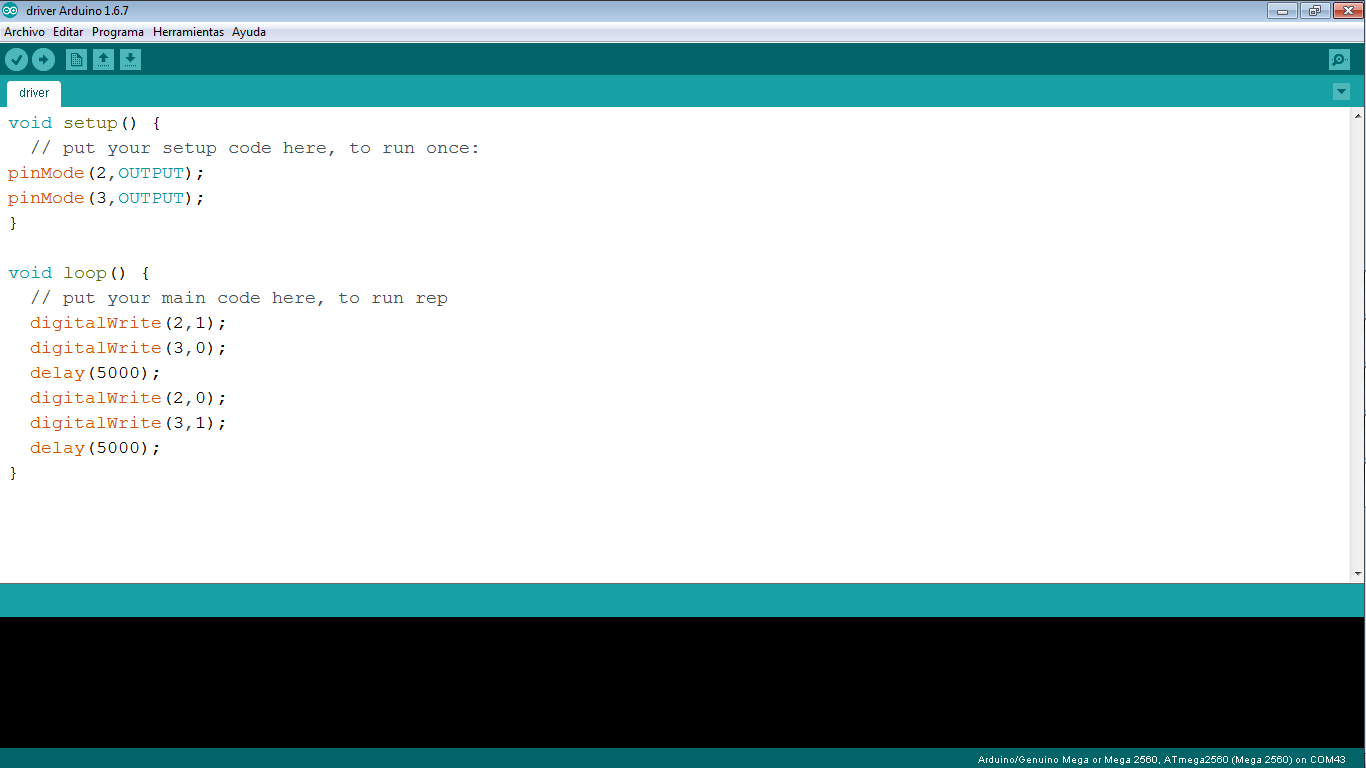
I program this PCB with Arduino.ide, you can find the files down.
The velocity of the motor is determined with delays in the code on Arduino, if you want to increment or reduce the velocity, you have to change the delay
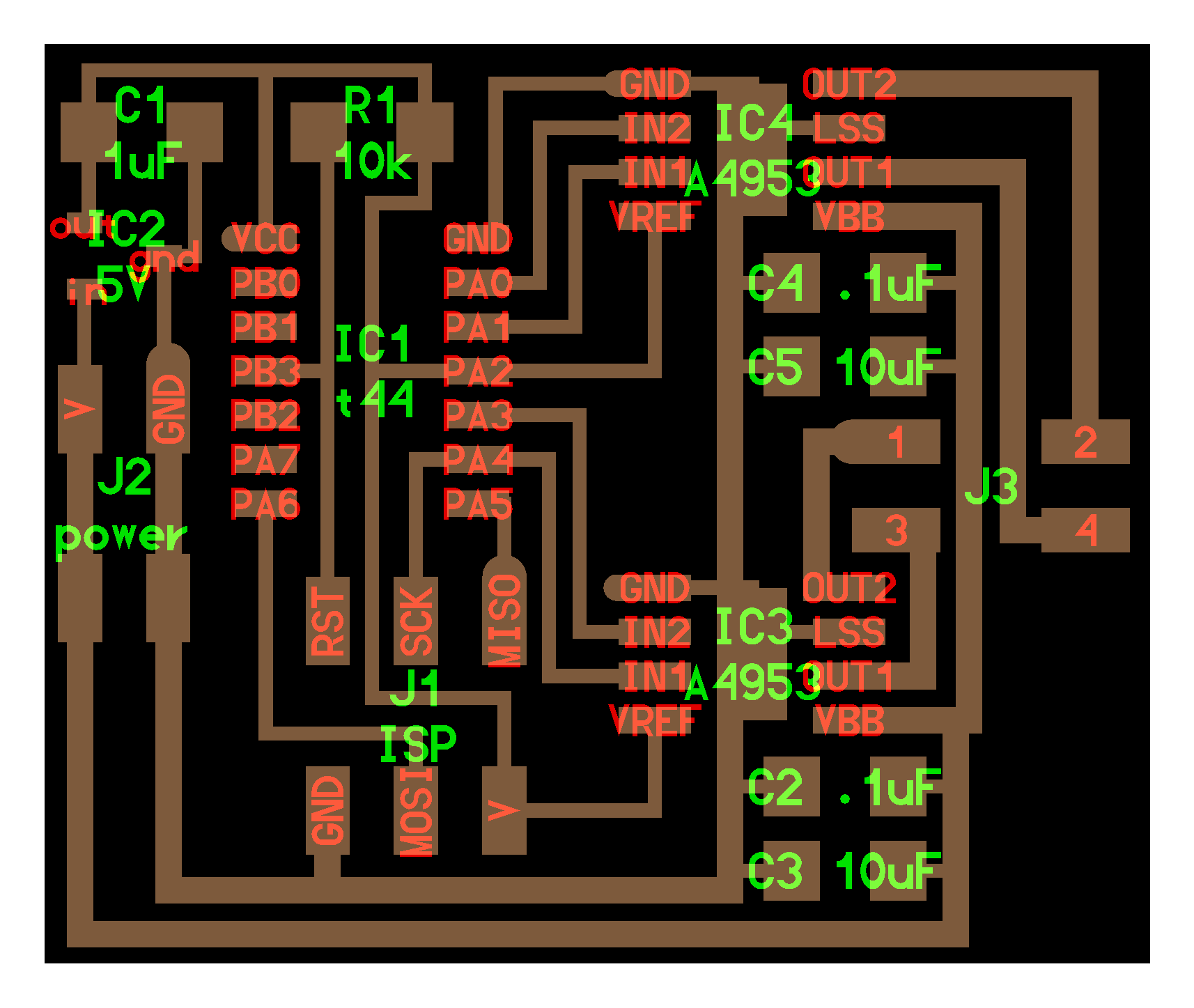
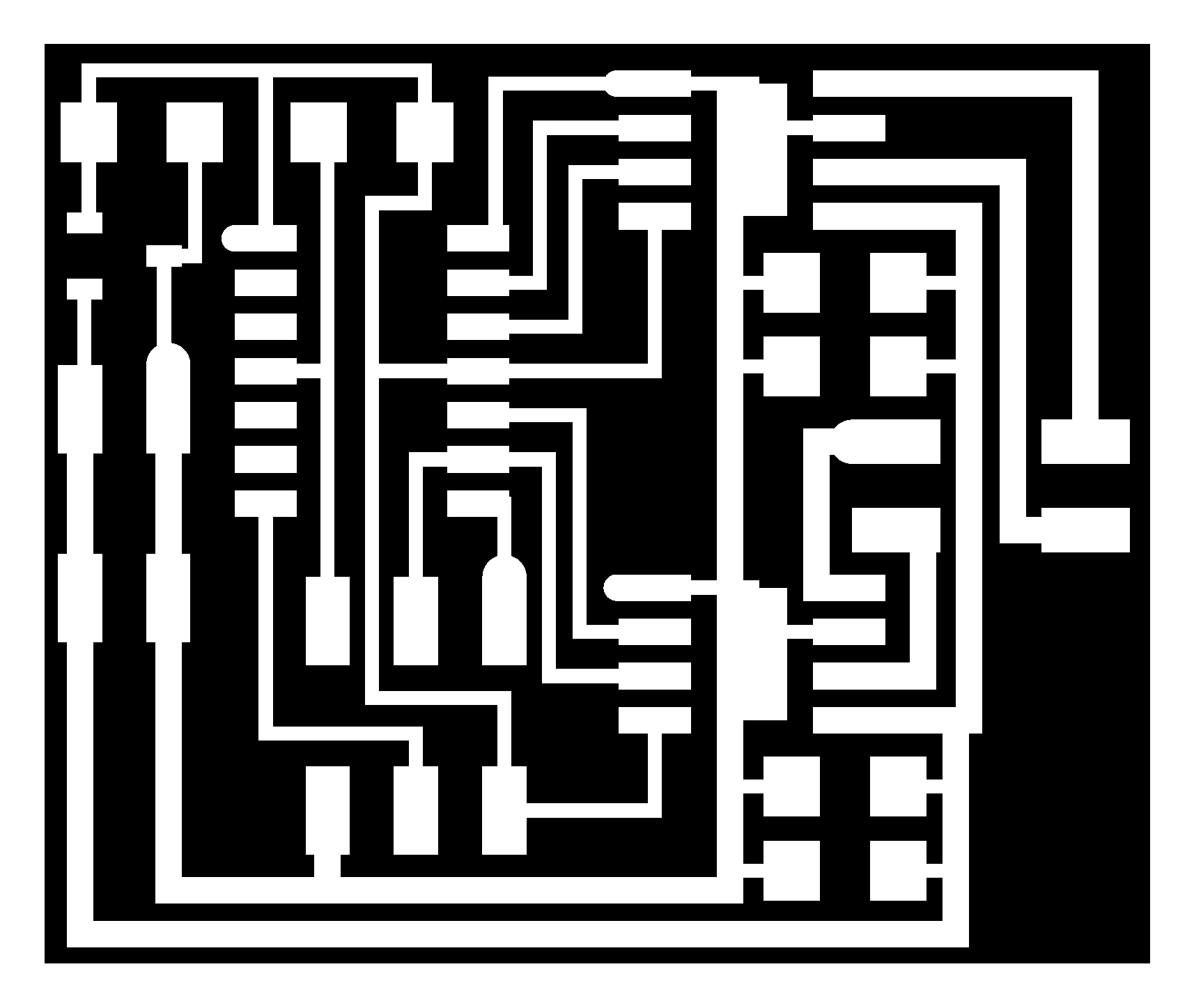
The files to do the PCB is down
I am using this pictures and you can download down.