Week 9: Mechanical design
Experience: Planning the machine
Objetive:
Explain my individual contribution to the projectLinks:
Core XY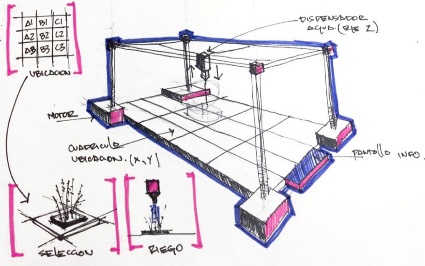
The purpose
The purpose we say for the machine is to make an automated irrigation system, especially for small plants
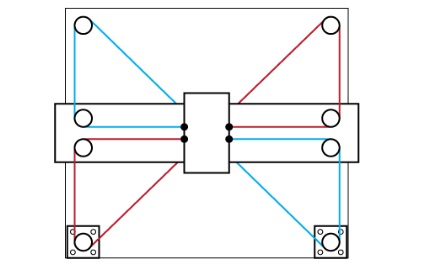
CoreXY theory
The CoreXY theory tells us that we can move a head in the X and Y axes using 2 fixed motors and a system of pulleys with ropes. We decided to use this theory for the movement of the machine
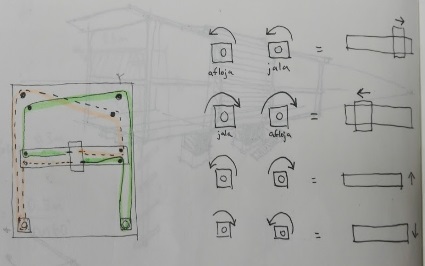
Our interpretation
This diagram shows our interpretation of how the spindle will move by rotating the steppers in different directions

Reusing parts
We decided to reuse parts of an old wooden 3D printer that was about to be discarded in the FabLab
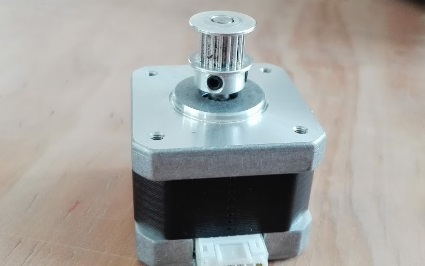
Stepper motors
We used 2 stepper motors similar to those seen here
Distribution of tasks
While the rest of colleagues would work on the documentation and design of the structure, I was required to test the steppers
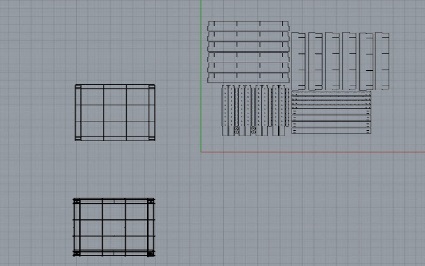
Design of the structure
This is the structure they designed for laser cutting, has individual spaces at the bottom to place the plants

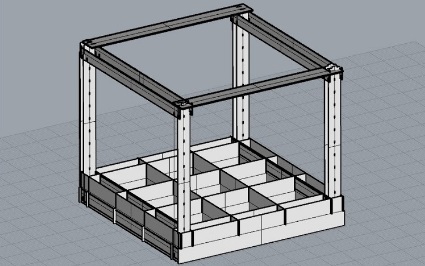
Assembling
Quickly the partners designed and cut the structure

Measurements
The armed structure measures approximately 60x60x50 cm

A little of my help
This step did not correspond to me, but I helped to mount the wheels. We had some discrepancies in how efficient this mechanism would be

Head movement
Here we also had to agree, when using a part of the printer unarmed or design a new

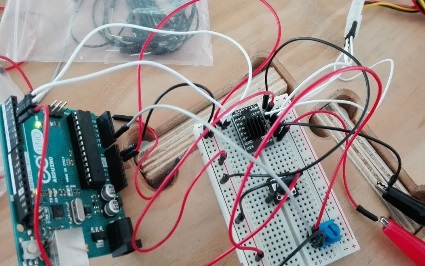
Back to my homework
As part of my assignment, I started the tests with the steppers, for this I helped the Peruvian electronic César Cruz, who accompanied us for some months

First stepper working
We got the first stepper to operate at 12v
Stepper driver
We used the stepper drivers that came in the unarmed 3D printer
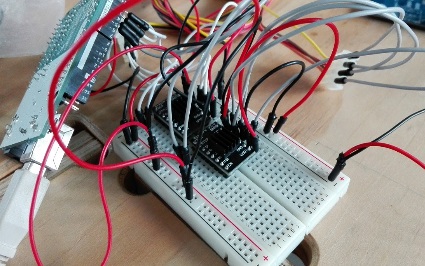
Second stepper
We connected the second driver and both motors worked well at different speeds and directions
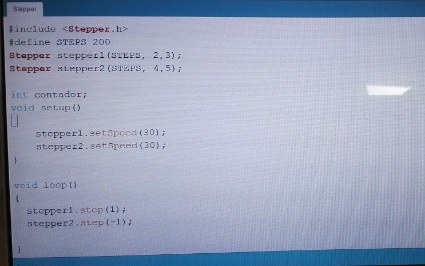
Code
This is a preview of the code I made
Powered by w3.css