project development
HAVE I ANSWERED THE FOLLOWINGS:
- What is the deadline? How much time do I have left?
- What tasks have been completed, and what tasks remain?
- How will I complete the remaining tasks in time?
- What has worked?
- What hasn't?
- What questions still need to be resolved?
- What have you learned?
final project
deadline-completion-remainder
The final project deadline was 19th June, 2017. In that time it was done quiet well and presented too. Now at present (28 june 19:47 GMT) following things are complete :
- All weekly assignment
- Final project
- Presentation slide and Video.
Only thing remain now to document the project development page to document the journey through the making of the final project. Given that I have 4 hours till now, its well ithin the limit to finish the project development as all the raw material are ready.
what has worked
what hasn't worked
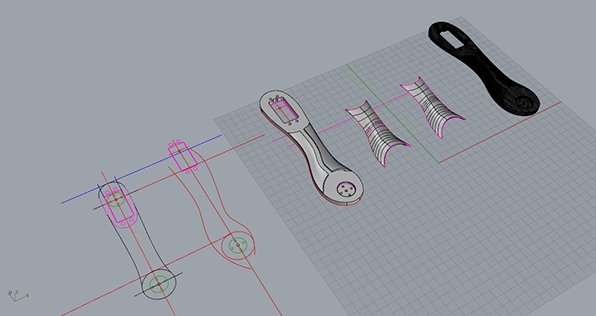
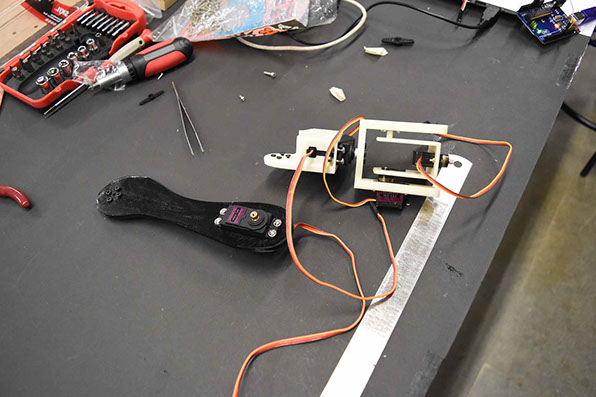
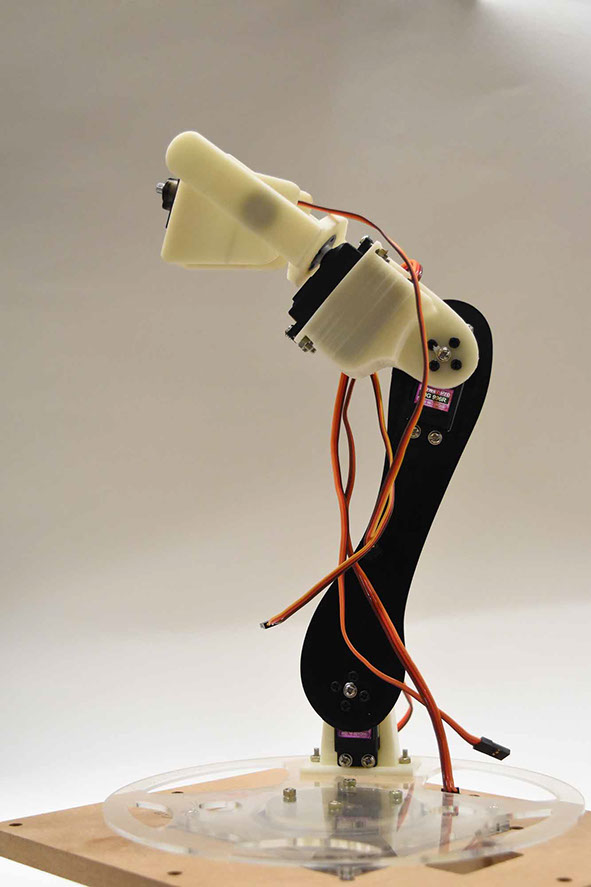
design of the robot: mechanism
Being an architect helps in sketching a lot. So knowingly I did not face much difficulty in the design as I had procured the motors and connectors beforehand. So I knew what to expect in term of fixture. Using standard motors like MG995 or MG90S helped a lot as 3D files of those were available online.
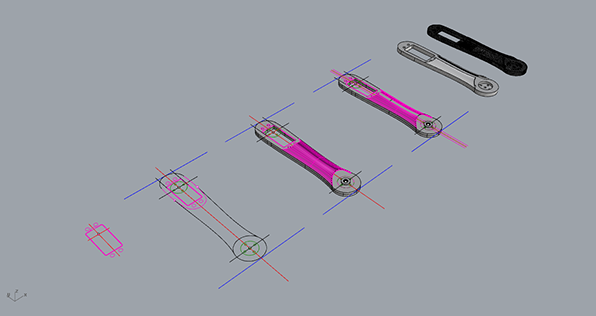
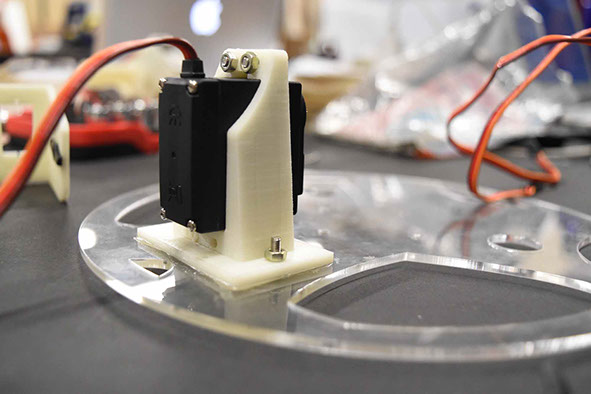
I started with the J2 or the 2nd axis of the robot for designing. Upon 3D printing I realised a few things. The first 3D print was done in PLA and took 6 hours due to slow speed and high resolution print.

I did not take in consideration of machine tolerance and PLA shrinkage. So the print came smaller than expected and the servo fixture did not sit in place. It called for redesign for that part and taught a lot for the parts to be made.

The servo holder was also small so the part failed.
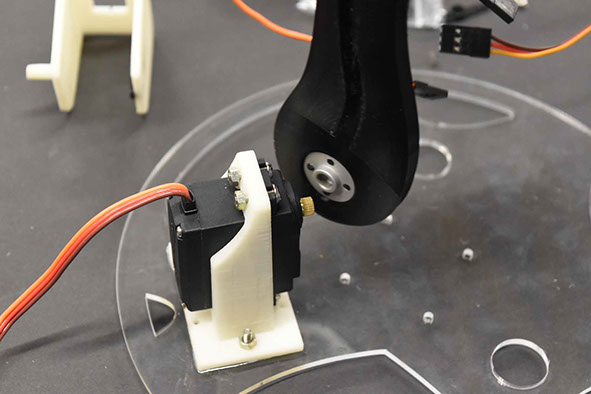
So the next part was designed and printed. It fitted the servo and the Metal horn perfectly to work with. There was a significant change in the 3D printing process also.
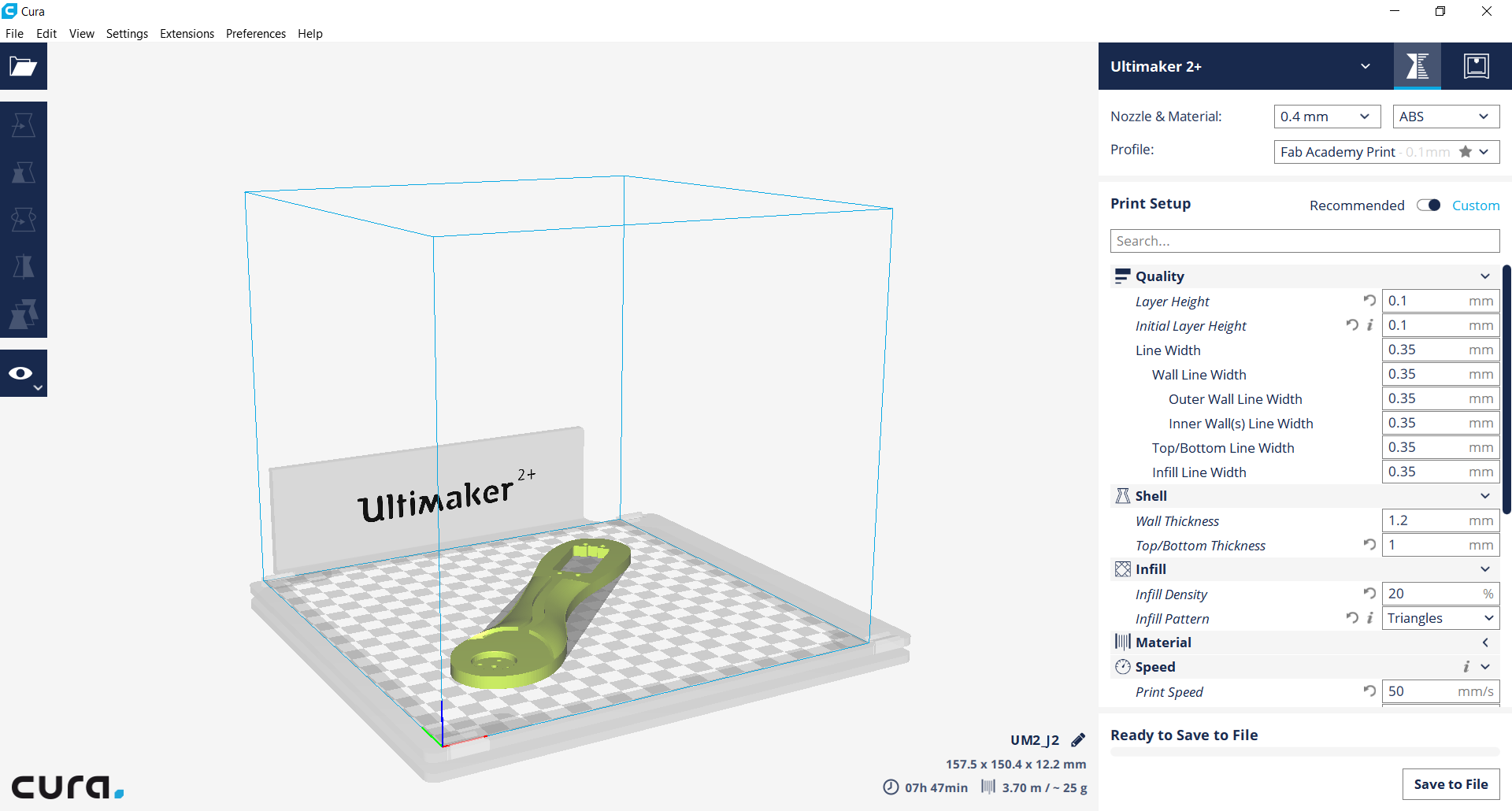

My instructor here Tapan Betai made some changes n the Cura setting which brought down the printing time from 7hr 47 min to 3 hr without changing much in the quality.
All the parts further was printed using ABS.
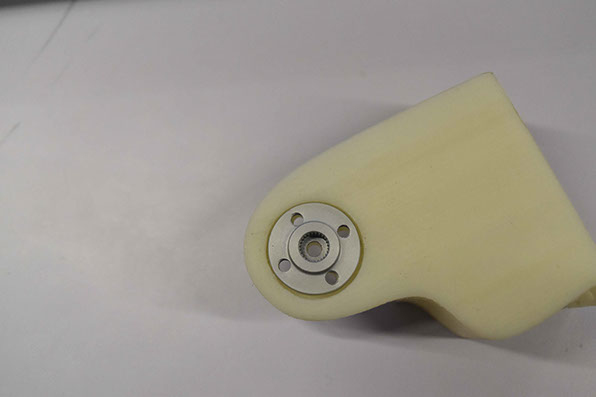
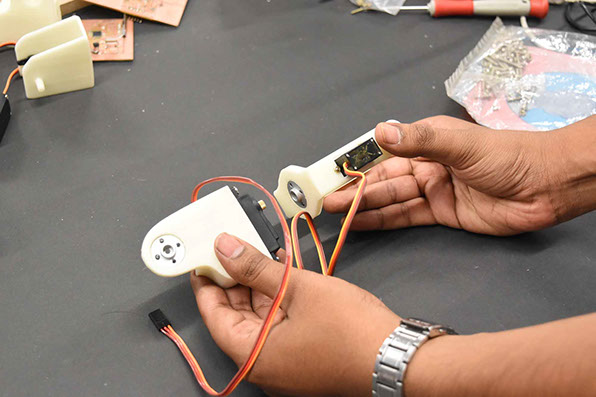
Like this part, everywhere the parts fitted perfectly.
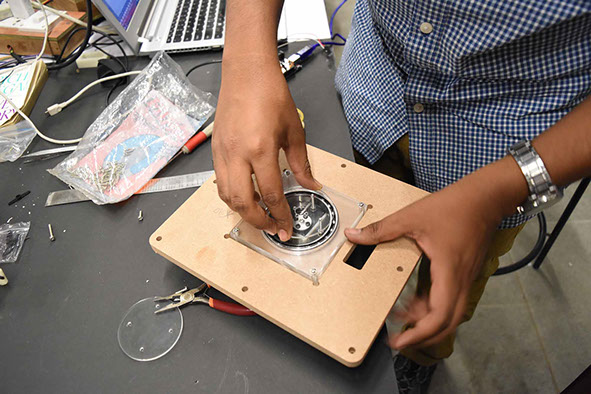
Once all the parts were printed, I concentrated on motors and fixtures.
I had tested each motors and labeled them of their respective axes. When all the parts were printed, cut and procured they were all laid out to be assembled together.
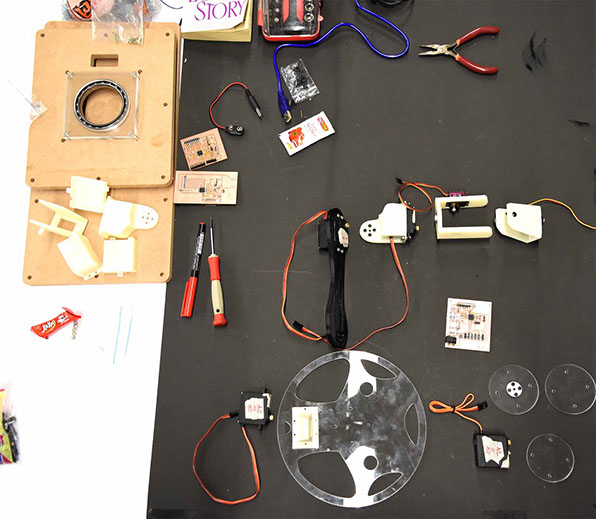
Now each axis is fixed with motors and holders and ready to to assembled together.
design of the robot: electronics
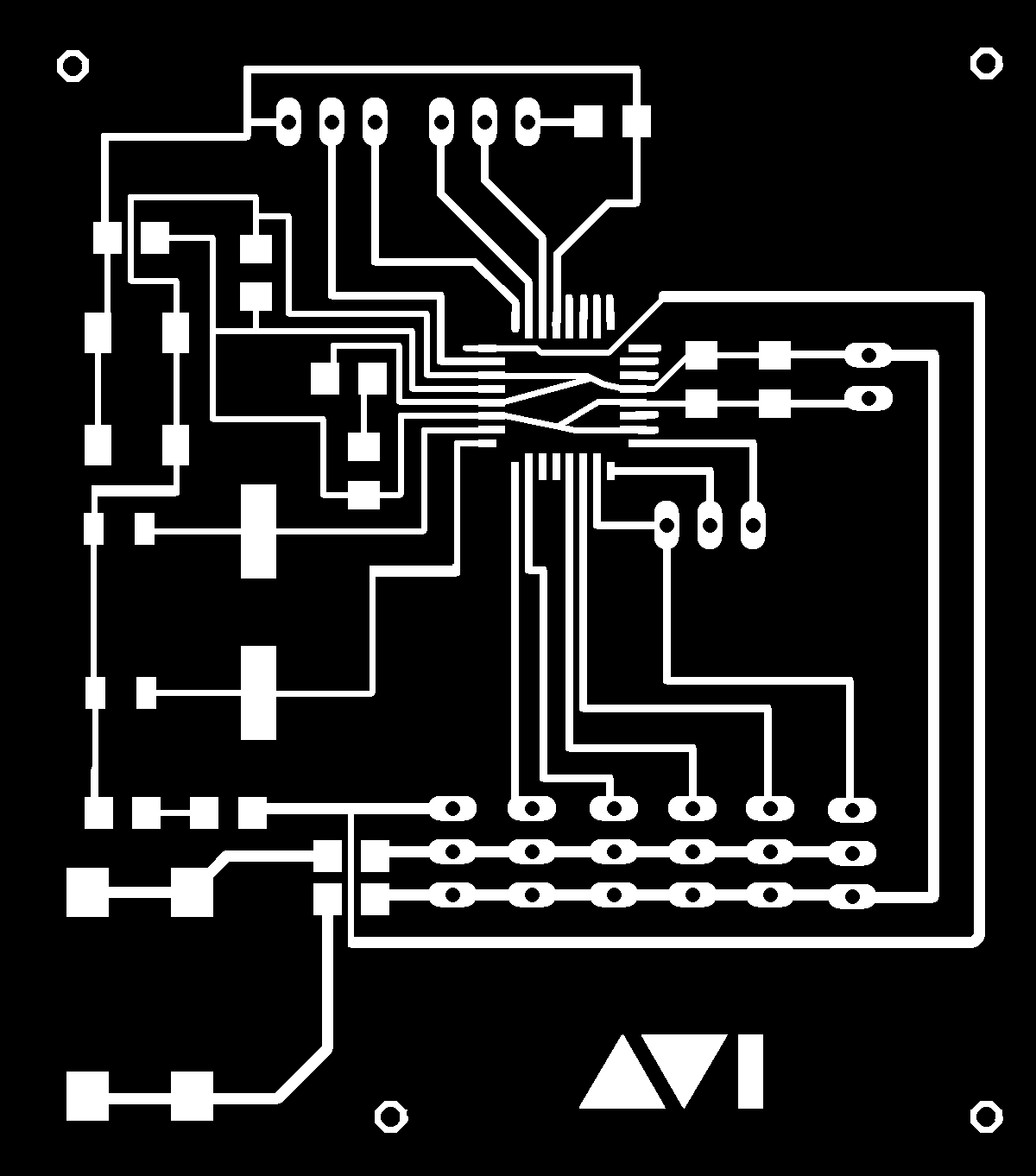
I started with the Satshakit schematic and fabricated the first board as is and tested the servos. Then I did 6 iteration of the board till I was not satisfied with the size of the board, compactness and safety. Images of first and second board are given.
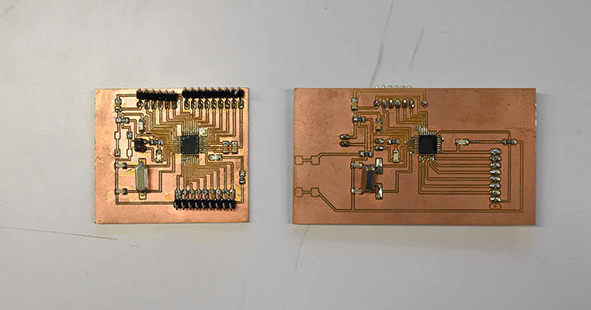
i had planned to use a DC jack but made several mistakes during the design. There was another error. Though corrected by the DRC.but some traces were always worn off.
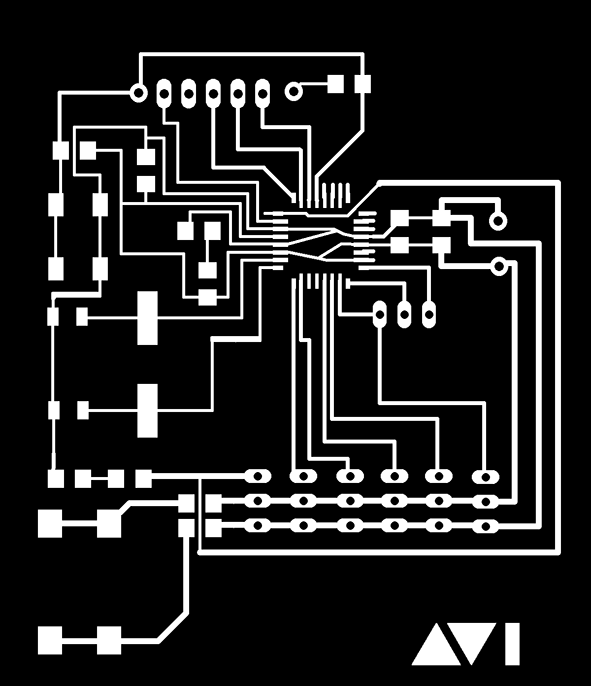
This is Version 2 versus version 6 below.
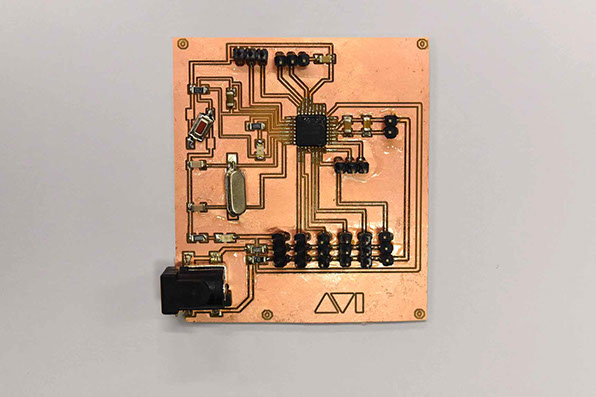
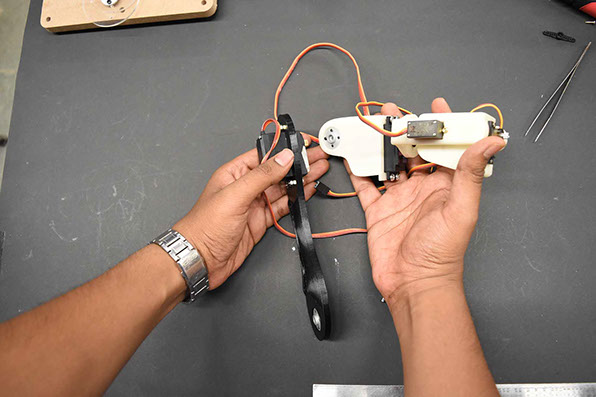
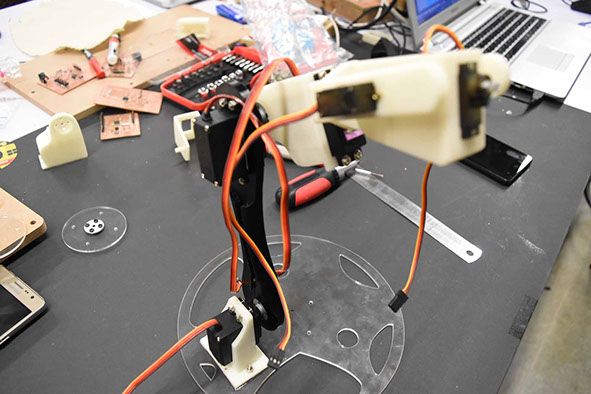
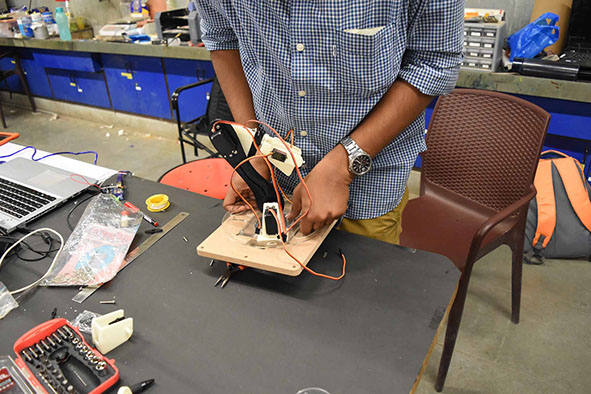
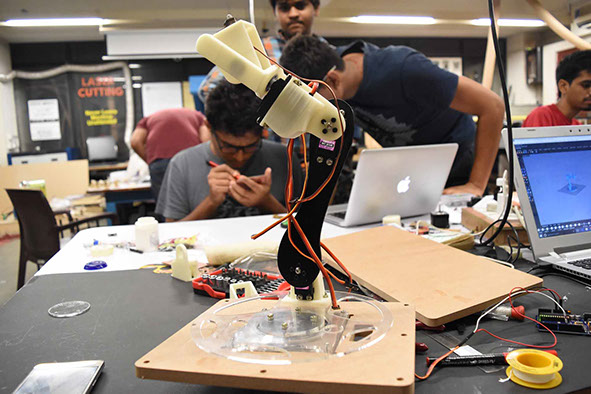
Once the board and mechanism was done. Both were connected and final project was ready to go.
what still need to be
resolved yet
Running 6 motors in perfect sync is a task in itself. Sometimes due to heavy power draw by the servos there is a delay in the whole system. That needs to be resolved. If not in the scope of Fab academy but in the next 2 years as I want to take it project further.
The Servo Jitter is a problem. Using smart servos will be another target in next 2 years.
Servos like Dynamixel will be tried to be used.
what have
i learned
I have learnt a great deal of system integration of various systems like : Design, mechanical design, electronics and interface. They might look simple but at each transition of one mode to other one need to be cautious about the failures and they will happen. I have learnt to tackle the failure and learn from them.
A special thanks to Gautam and Mohit for their help in electronics and Arunima for her endless support to go on.
go to final project >>
Avishek Das | 2017 | FabLab CEPT