For my final project I want to create a small, 2 powered wheel robot that knows where it is in space. For this week I would like to get over the first hurdle of creating a small two powered wheel robot, or at least control two motors hopefully with the use of a joystick.
I have found theITP Physical computing website incredibly useful. I will be following this tutorial, but also the other pages have helped to to get a greater grasp on the different components and why we have them.
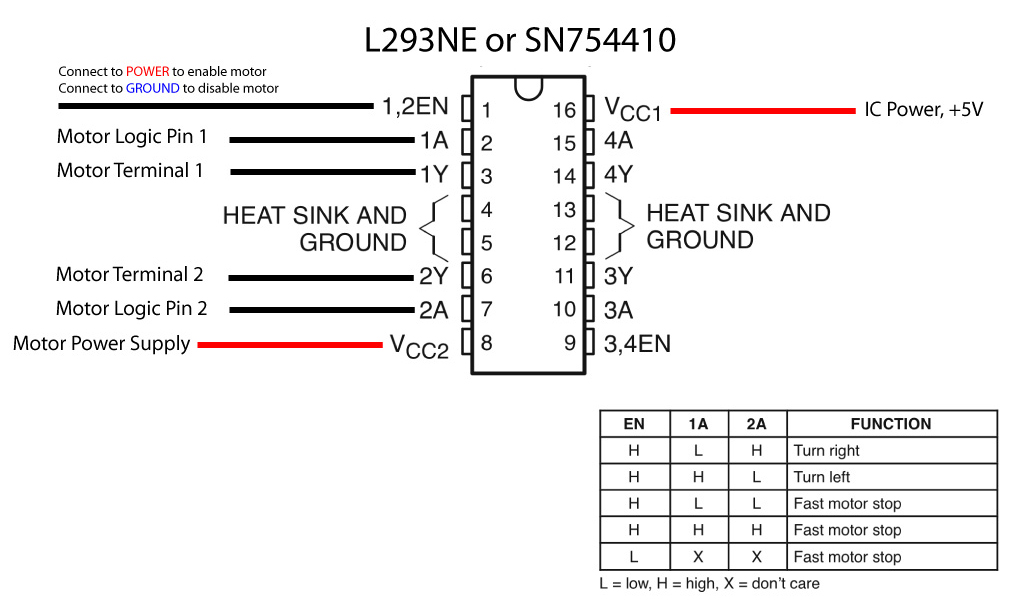
Following the tutorial I was succesful in creating a motor that moves back and forth or switches off with a 3 place button, an Arduino and a SN754410 H-bridge.
As I wanted to control the speed as well as the direction of two motors, I used the SN754410 data sheet for more info.
With this information I used used a joystick to allow me to vary the voltage going to pin 1 and 9 whilst controlling the direction of each motor using pins 2 and 7 for one motor and pins 10 and 15 for the other.
Week 13 is where I continued this project with the input devices using the joystick.
Week 15 is also where I am putting together the board for all output/input and networking weeks.