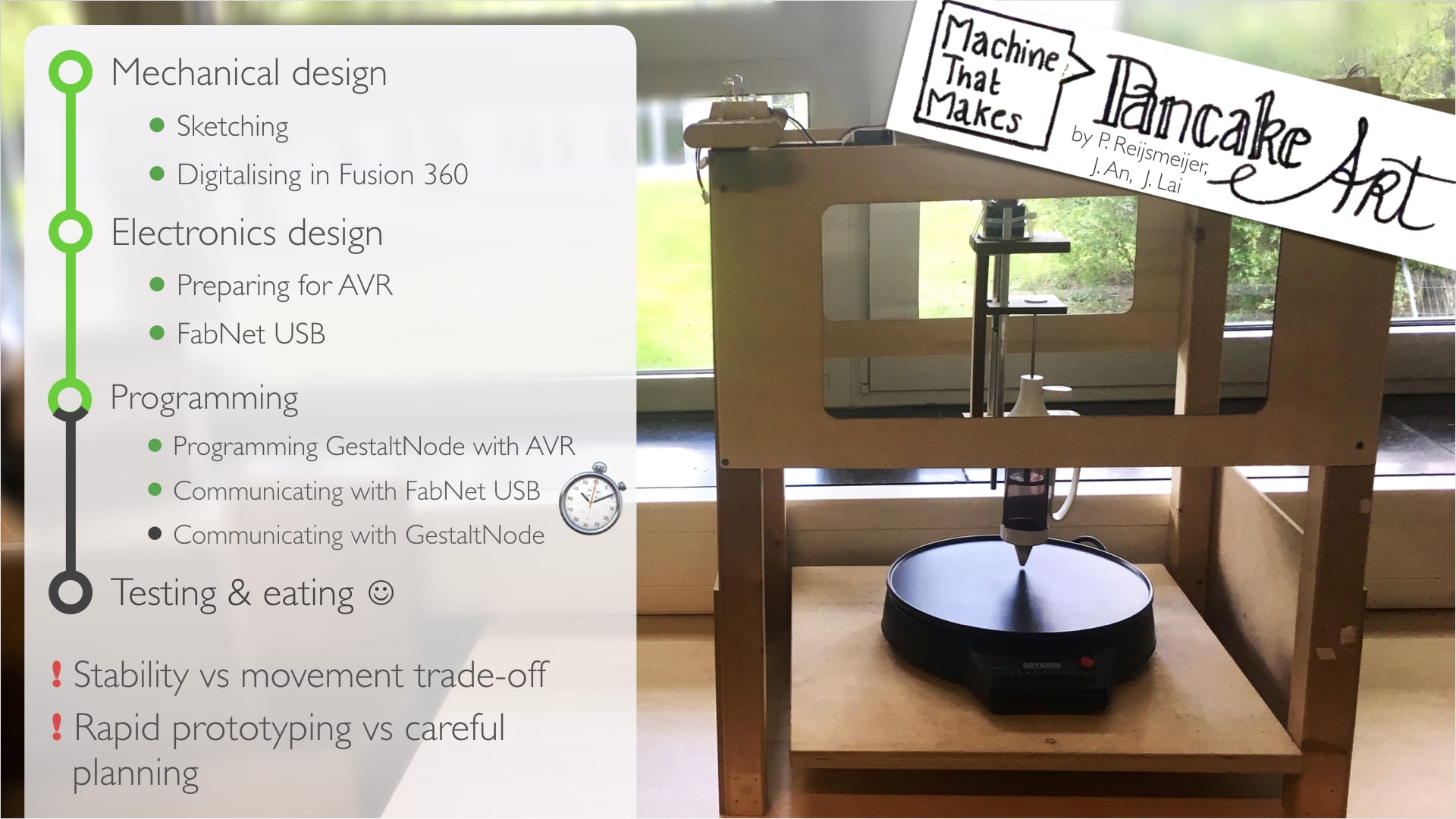
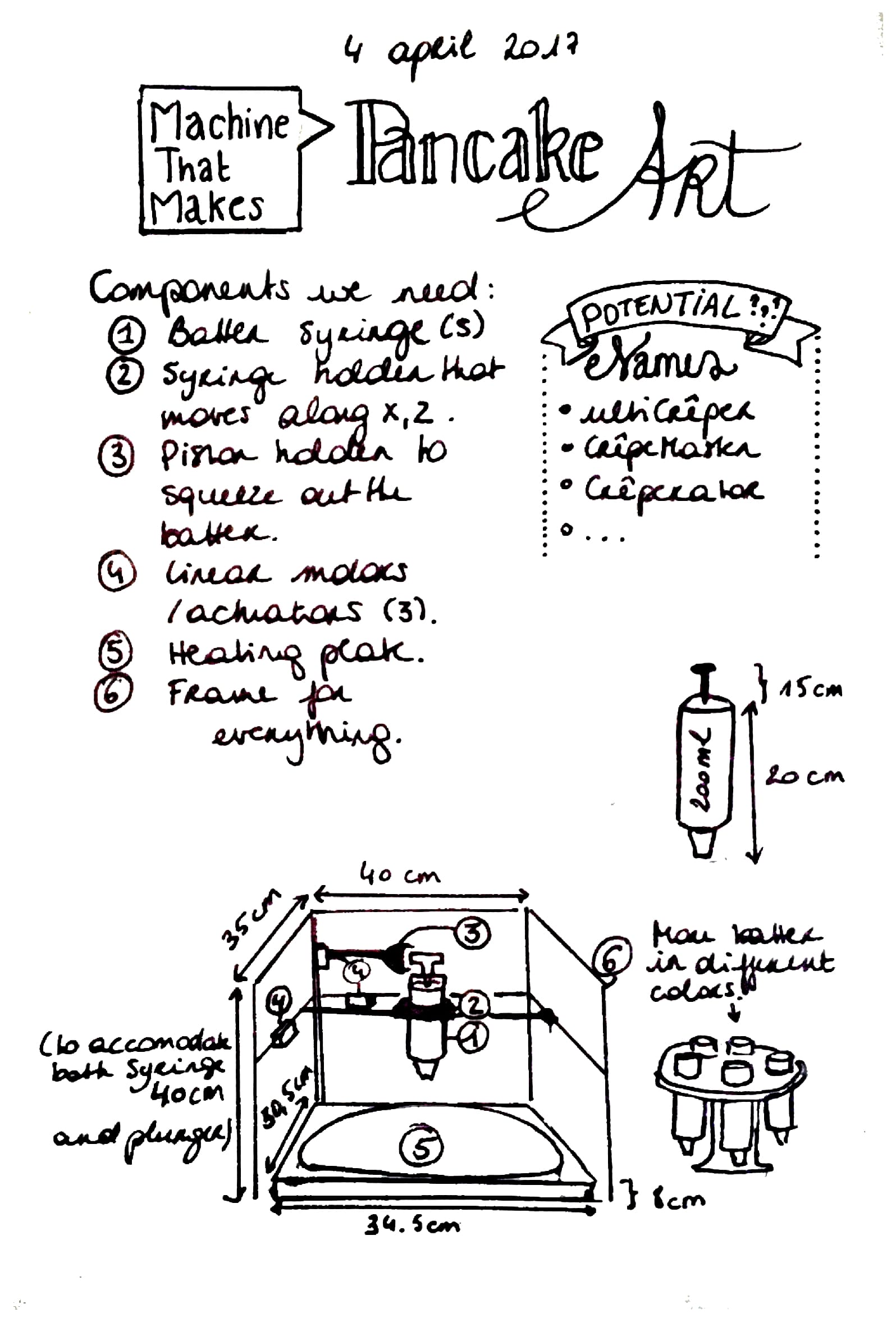
This week we got the following tasks:














/*
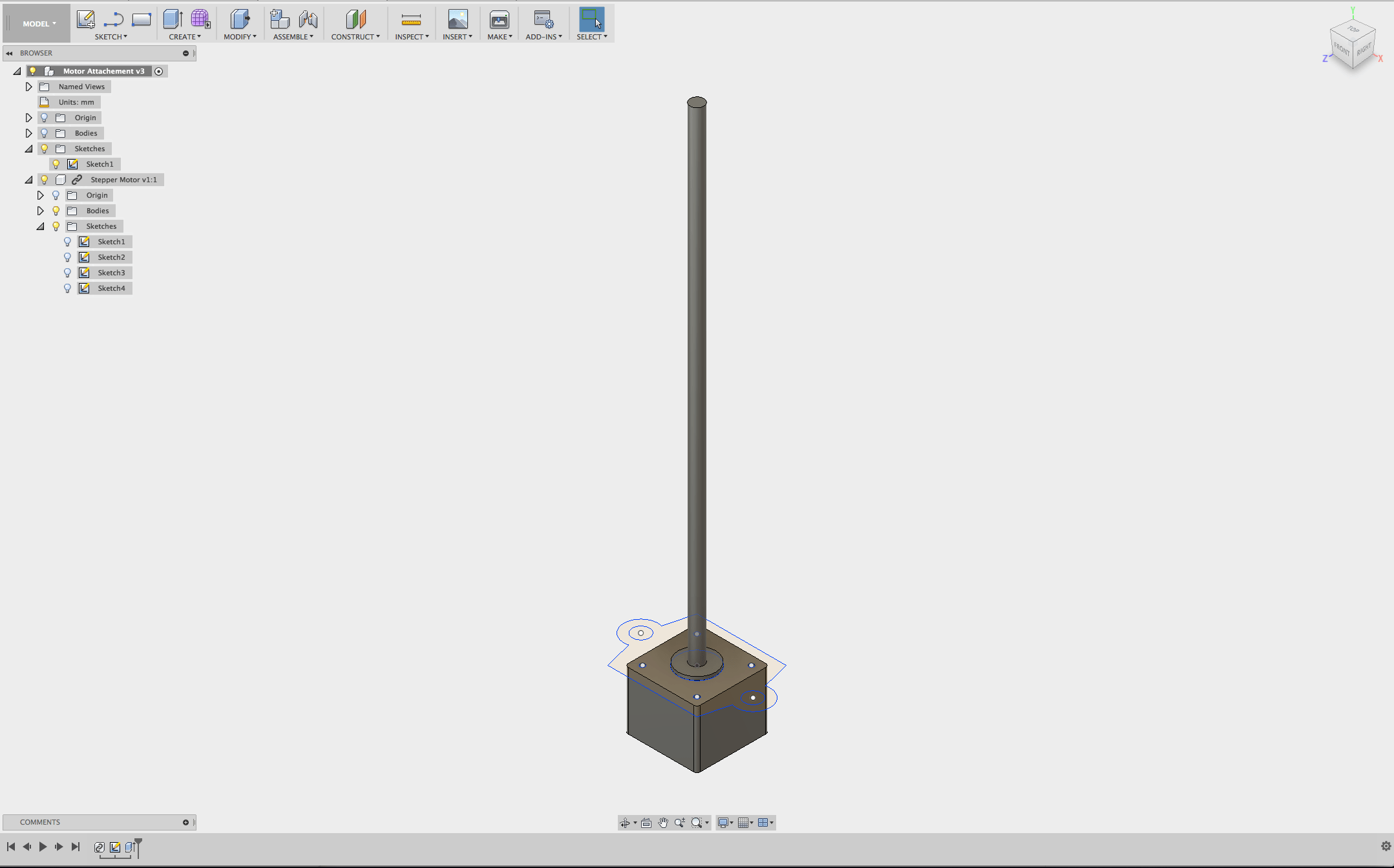
Using a Pololu A4988 or StepStick Stepper Motor Driver with FabScan-Shield.
*/
#define MS_PIN A5 //HIGH for 16 microstepping, LOW for no microstepping
#define EN1_PIN 2
#define STEP1_PIN 3
#define DIR1_PIN 4
#define EN2_PIN 5
#define STEP2_PIN 6
#define DIR2_PIN 7
#define EN3_PIN 11
#define STEP3_PIN 12
#define DIR3_PIN 13
#define EN4_PIN A0
#define STEP4_PIN A1
#define DIR4_PIN A2
int x;
boolean done;
int curDIRx;
String forwards;
String backwards;
String left;
String right;
String down;
String up;
int pumpx;
void setup()
{
pinMode(EN1_PIN, OUTPUT);
pinMode(EN2_PIN, OUTPUT);
pinMode(EN3_PIN, OUTPUT);
pinMode(EN4_PIN, OUTPUT);
digitalWrite(EN1_PIN, HIGH); //deactivate driver (LOW active)
digitalWrite(EN2_PIN, HIGH); //deactivate driver (LOW active)
digitalWrite(EN3_PIN, HIGH); //deactivate driver (LOW active)
digitalWrite(EN4_PIN, HIGH); //deactivate driver (LOW active)
pinMode(DIR1_PIN, OUTPUT);
pinMode(DIR2_PIN, OUTPUT);
pinMode(DIR3_PIN, OUTPUT);
pinMode(DIR4_PIN, OUTPUT);
digitalWrite(DIR1_PIN, LOW); //LOW or HIGH
digitalWrite(DIR2_PIN, LOW); //LOW or HIGH
digitalWrite(DIR3_PIN, LOW); //LOW or HIGH
digitalWrite(DIR4_PIN, LOW); //LOW or HIGH
pinMode(STEP1_PIN, OUTPUT);
pinMode(STEP2_PIN, OUTPUT);
pinMode(STEP3_PIN, OUTPUT);
pinMode(STEP4_PIN, OUTPUT);
digitalWrite(STEP1_PIN, LOW);
digitalWrite(STEP2_PIN, LOW);
digitalWrite(STEP3_PIN, LOW);
digitalWrite(STEP4_PIN, LOW);
pinMode(MS_PIN, OUTPUT);
digitalWrite(MS_PIN, LOW); //no microstepping
x = 0;
done = false;
forwards = "FRONT";
backwards = "BACK";
down = "down";
up = "up";
left = "left";
right = "right";
pumpx = 0;
}
void setDirX(String dir)
{
if (dir == "FRONT") {
digitalWrite(DIR2_PIN, 0); //LOW or HIGH
digitalWrite(DIR3_PIN, 0); //LOW or HIGH
} else {
digitalWrite(DIR2_PIN, 1); //LOW or HIGH
digitalWrite(DIR3_PIN, 1); //LOW or HIGH
}
}
void moveX(String dir, int n) //maximum 6000 back and forth from front or back position
{
while (x < n) {
digitalWrite(EN2_PIN, LOW); //activate motor
digitalWrite(EN3_PIN, LOW); //activate motor
setDirX(dir);
digitalWrite(STEP2_PIN, HIGH);
digitalWrite(STEP3_PIN, HIGH);
delay(2);
digitalWrite(STEP2_PIN, LOW);
digitalWrite(STEP3_PIN, LOW);
delay(2);
digitalWrite(EN2_PIN, HIGH); //deactivate motor
digitalWrite(EN3_PIN, HIGH); //deactivate motor
x++;
}
x = 0;
}
void setDirY(String dir)
{
if (dir == "left") {
digitalWrite(DIR1_PIN, 0); //LOW or HIGH
} else {
digitalWrite(DIR1_PIN, 1); //LOW or HIGH
}
}
void moveY(String dir, int n)
{
while (x < n) {
digitalWrite(EN1_PIN, LOW); //activate motor
setDirY(dir);
digitalWrite(STEP1_PIN, HIGH);
delay(2);
digitalWrite(STEP1_PIN, LOW);
delay(2);
digitalWrite(EN1_PIN, HIGH); //deactivate motor
x++;
}
x = 0;
}
void setDirPump(String dir)
{
if (dir == "down") {
digitalWrite(DIR4_PIN, 1);
} else {
digitalWrite(DIR4_PIN, 0);
}
}
void resetPump(){
while (pumpx > 0) {
digitalWrite(EN4_PIN, LOW); //activate motor
setDirPump(up);
digitalWrite(STEP4_PIN, HIGH);
delay(2);
digitalWrite(STEP4_PIN, LOW);
delay(2);
digitalWrite(EN4_PIN, HIGH); //deactivate motor
pumpx--;
}
}
void pumpIt(String dir, int n) //maximum 3000 units up or down
{
if(pumpx == n){
resetPump();
}
while (pumpx < n) {
digitalWrite(EN4_PIN, LOW); //activate motor
setDirPump(dir);
digitalWrite(STEP4_PIN, HIGH);
delay(2);
digitalWrite(STEP4_PIN, LOW);
delay(2);
digitalWrite(EN4_PIN, HIGH); //deactivate motor
pumpx++;
}
}
void drawPat(int a) { //One Unit is 4000 by 4.5cm distance to the plate edge
moveX(forwards, a);
moveY(right, a - 500);
moveX(backwards, a - 500);
moveY(left, a - 1000);
pumpIt(down,1000);
a = a - 500;
while (a >= 1000) {
moveX(forwards, a - 500);
moveY(right, a - 500);
moveX(backwards, a - 500);
moveY(left, a - 1000);
a = a - 500;
}
}
void loop()
{
while(!done){
drawPat(4000);
done = true;
}
}