Dc motor block diagram
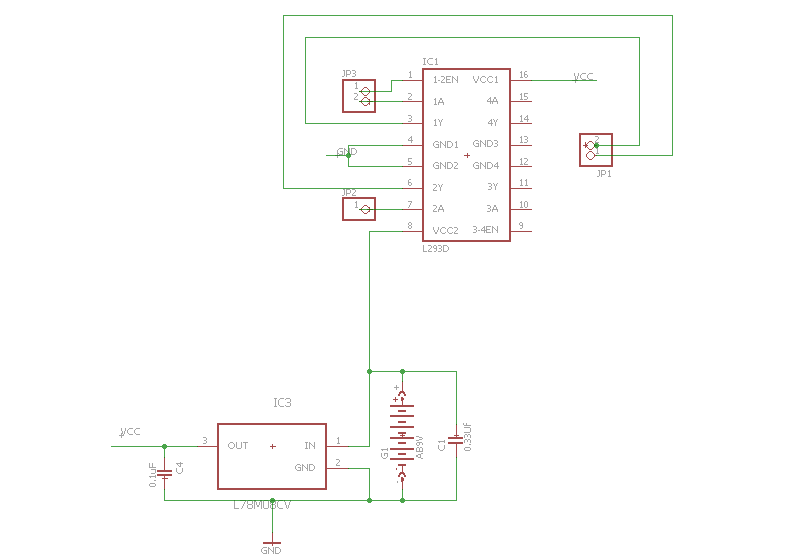
 H-bridge schematic
H-bridge schematic
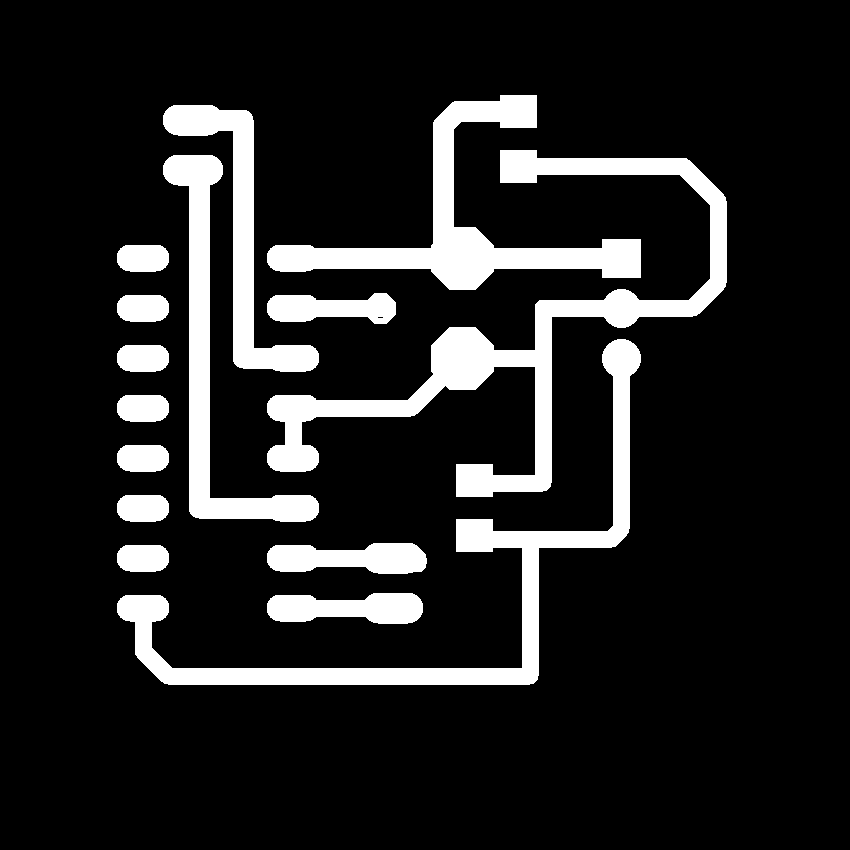
 H-bridge board
H-bridge board
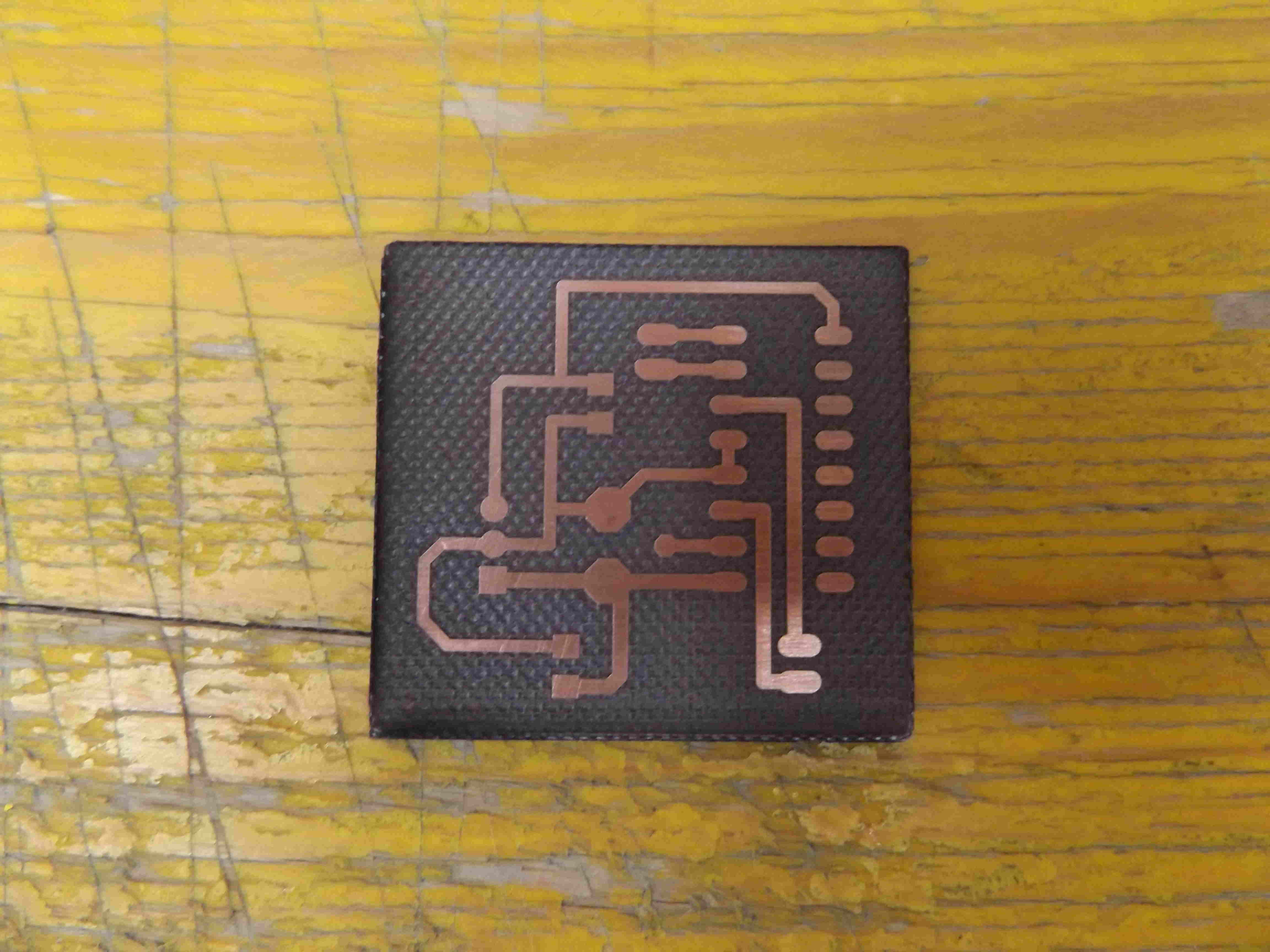
 H-bridge board milled
H-bridge board milled
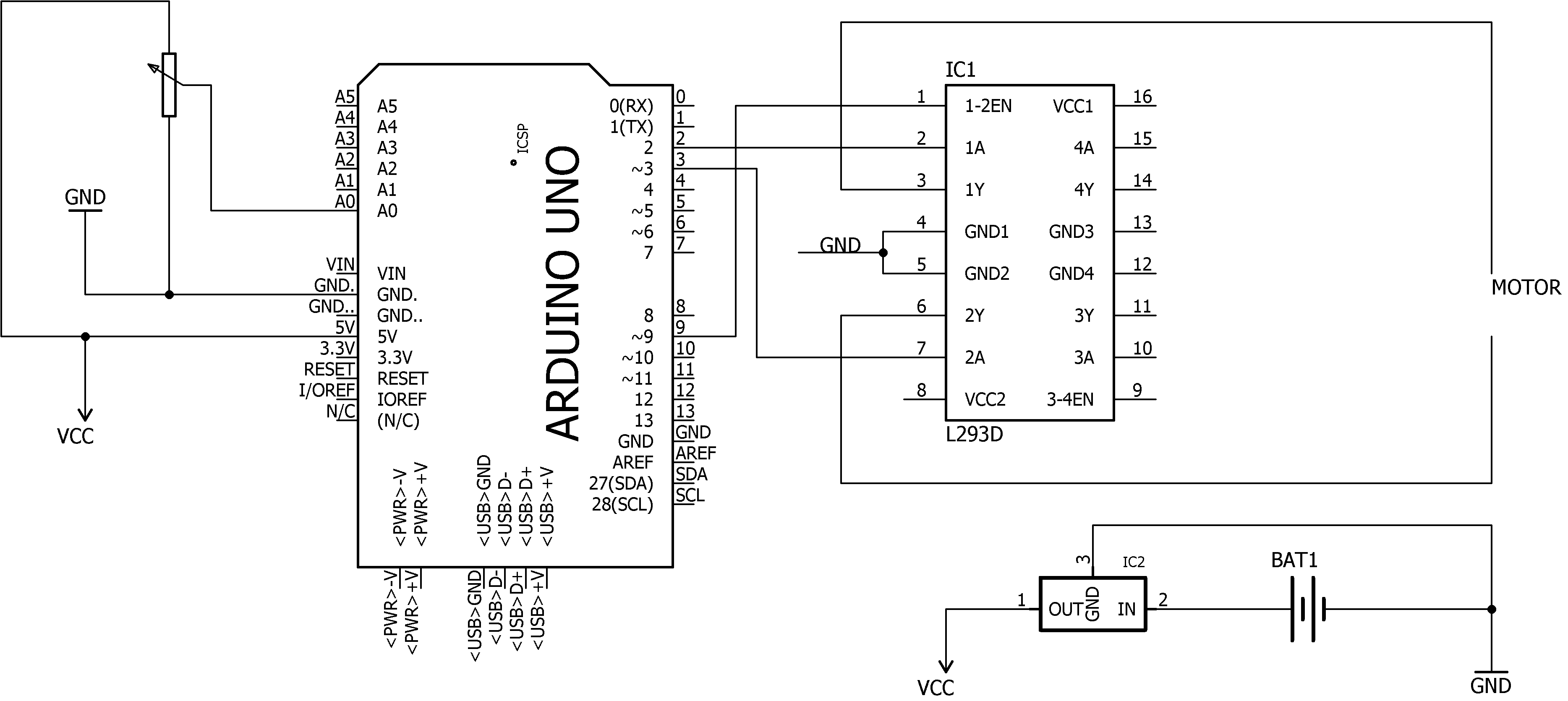
 H bridge driving DC Motor circuit
H bridge driving DC Motor circuit DC motor code
DC motor code
 code
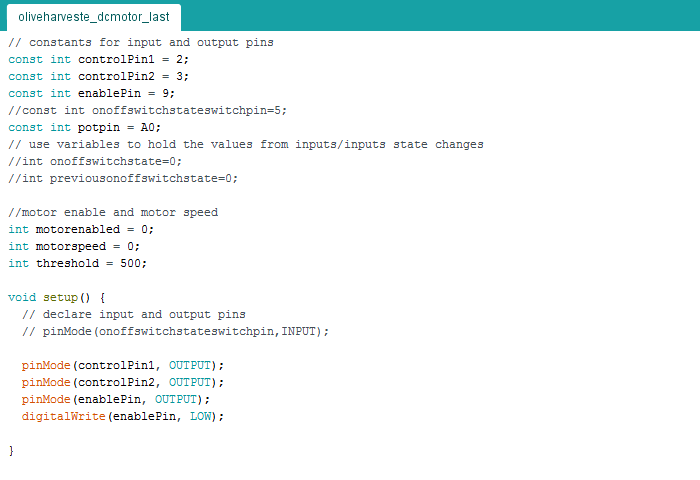
codeaccording to the schematic above in the code I declare constants for input and output pins
const int controlPin1 = 2; here to define that controlpin1 in Hbridge is connected to pin2 in satshakit board
const int controlPin2 = 3; controlpin2 in H bridge is connected to pin3 in satshakit board
const int enablePin = 9; enable pin in hbridge is connected to pin9 in satshakit board.
const int potpin = A0; input pin for potentiometer in A0 port in satshakit board.
int motorenabled = 0; define that motor enable is 0 in the beginning means motor is not enabled.
int motorspeed = 0; starting speed of the motor is 0.
int threshold = 500; threshold value is defined to 500
void setup() {
// declare input and output pins
setup section is to define input output pins in the IDE code
pinMode(controlPin1, OUTPUT); controlpin1 and contolpin2 are output ports value sent to h bridge to drive the dc motor forward or reverse
pinMode(controlPin2, OUTPUT);
pinMode(enablePin, OUTPUT); enable pin value is output pin in satshakit board and send to h bride to enable or disable the chip
digitalWrite(enablePin, LOW); enable pin is low means that the chip is not enabled in the beginning. motor is in stop state.
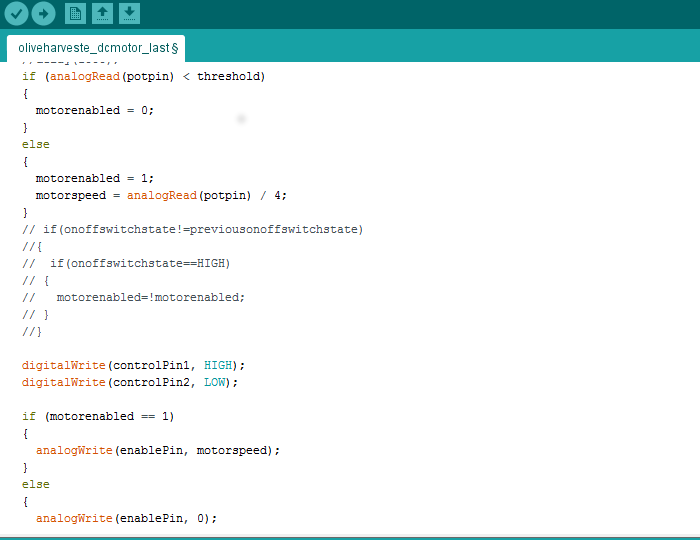
void loop(): here in this section reside the code of the card
{ if (analogRead(potpin) < threshold): I read input value of potentiometer in A0 port in satshakit board I turn potentiometer right and left one is to read ascending values or descending values accordng to the installation, values read fropotentiometer will be from 0 to 1023. here I compare the value read with threshol value 500.
{
motorenabled = 0; if condition is true means potentiometer input is less than 500 motor is not enabled
}
else
{
motorenabled = 1; if condition is false value read greater or equal 500 motor is enabled this is to filter the noise.
motorspeed = analogRead(potpin) / 4; this is to map values from 0-1023 to 0-255. this mapping is necessary because the motor speed should be within the range of 0-255.
}
digitalWrite(controlPin1, HIGH); at default state control pin1 is 1 and control pin2 is 0 this set the motor turning forward in one direction, if I want the motor to turn in the reverse direction these values should be LOW and HIGH respectively. here Im running motor in forward direction. digitalWrite(controlPin1, HIGH); digitalWrite(controlPin1, HIGH);
digitalWrite(controlPin2, LOW);
if (motorenabled == 1) check for motor enable value if 1 is enabled and we can send the speed of running to its input port, otherwise its not running and motor speed is 0.
{ analogWrite(enablePin, motorspeed); motor speed is the value read and mapped of the potentiometer, enable pin will receive the motor speed value as well if its different than 0.
}
else
{ analogWrite(enablePin, 0); if condition is false enable pin is 0 and motor speed is 0 as well, as the first state.
} close open brackets.
}
no need to install the bootloader this time for uploading program. board programming.
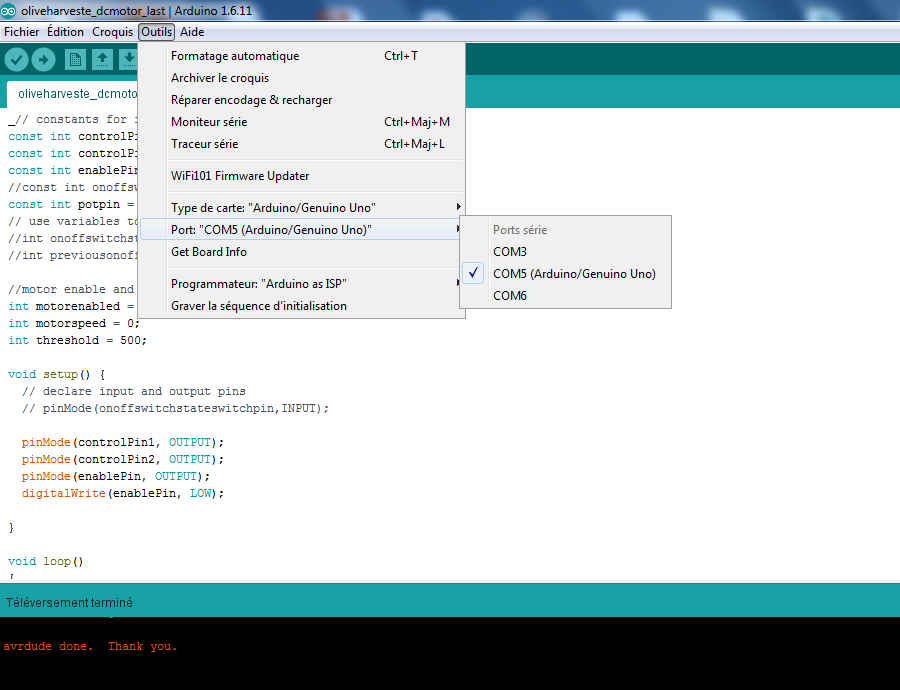 result on video
result on video all sashakit_pot files you can find in input devices page. To download design on eagle and png files. here is the design H-bridge board on eagle
here is the shematic H-bridge board on eagle
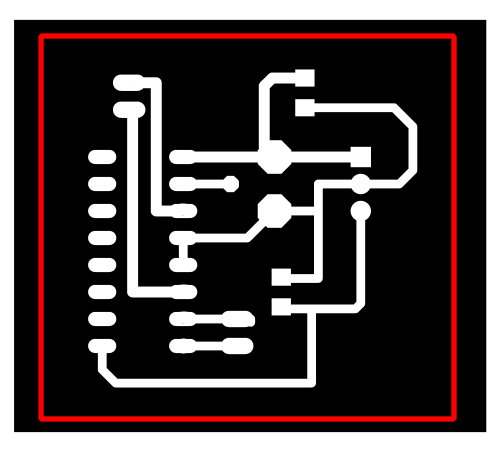
here is H-bridge board traces and outline.
{kind=link}
here H-bridge driving Dc motor program in arduino IDE