Final Project Updates and Progress
Go back HOME
Introduction
A central part of Fab Academy is to conceptualize and execute a final project using the skills learned during the program. Please find my Final Project updates in the sections below:
1st Update: Week 1 - Initial Deliberation
//see my Week 1 Assignment page for specific steps on how I reached this result
I had decided I want to work on a some kind of a terrestrial rover for my Final Project - but one that was utility based rather than simply navigation based. In addition to exploring a given terrain, the goal of the terrestrial rover would be to pick up trash - and that too, a specific type of trash: (used) Cigarette Butts!
WHY THIS IDEA?
Picking up someone else's trash/waste is probably the least favourite activity of ANYBODY in charge of keeping a place clean, green and tidy. In outdoor settings, even if waste collectors are hired to pick up waste, usually the larger, more noticeable waste is the first to be spotted, scooped up or swept away - leaving the almost invisible used cigarette butts still lying on the street, ignored.
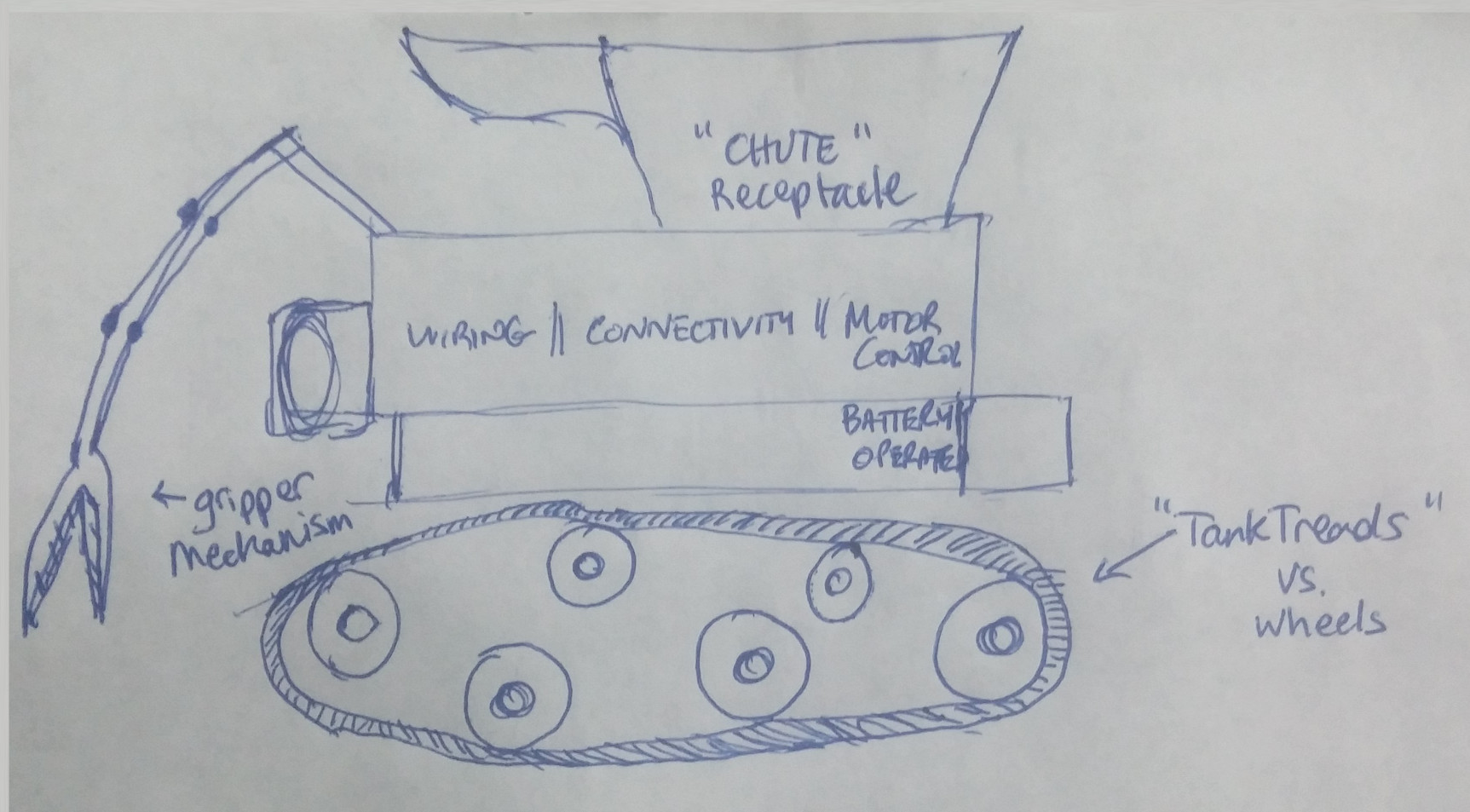
WORKING MODEL (Tentative)
Please see my (work in progress) sketch below:
2nd Update: Week 2 - 2D and 3D CAD Modeling
//see my Week 2 Assignment page for specific steps on how I reached these results
Looking at my original hand-drawn sketch, I noticed that my drawing roughly consisted of Shape Primitives - such as Rectangles, Ellipses, Concentric Circles and Lines. I explored drawing a 2D sketch of my proposed final project using QCAD:
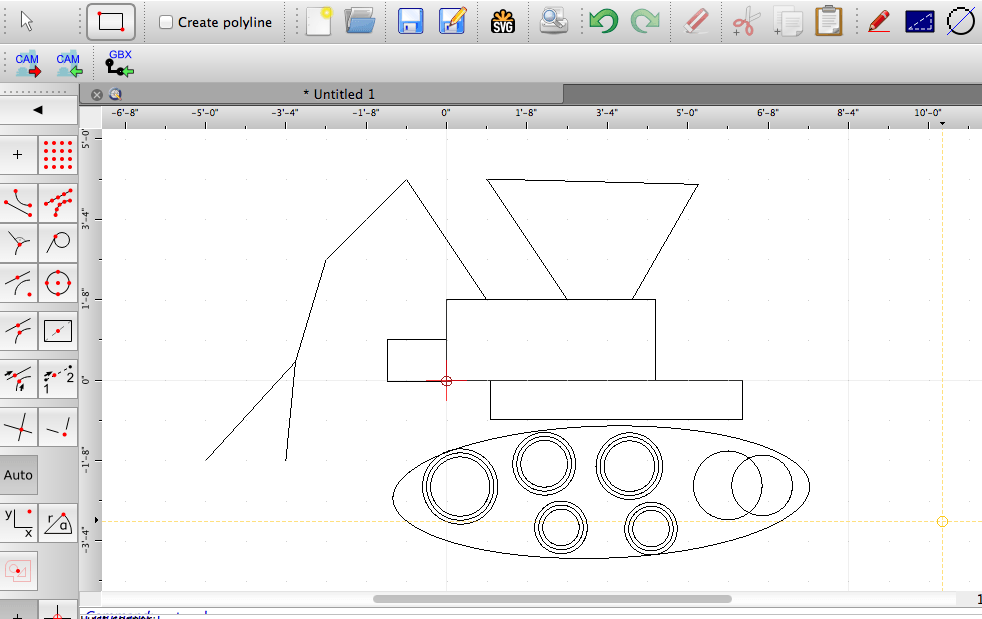
Please find a copy of my 2D Model designed using QCAD: QCAD 2D Model v.1
My next steps were to create a similar model, but using 3D CAD modeling software - which took me some time due to the steep learning curve! However, I cobbled something together on Autodesk's 123D cloud software after having gone through its easy-to-access tutorials on shape primitives and transforms modeling:
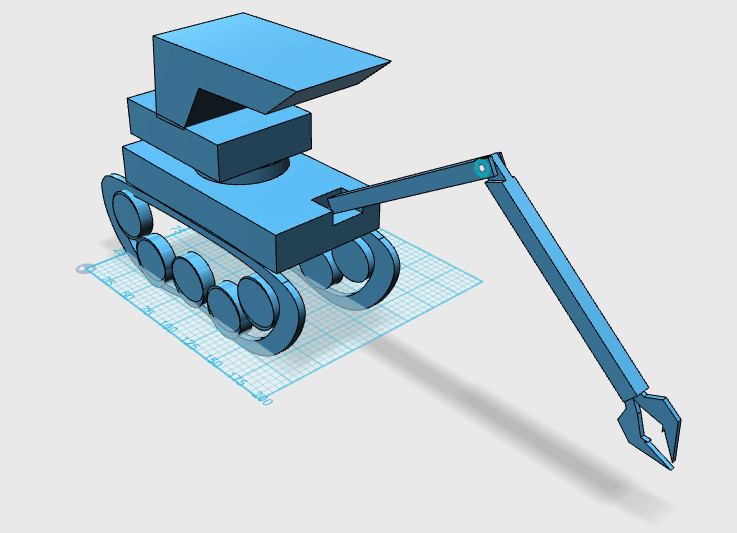 Here is the 123D CAD file depicting my model: Robot Project v.2
Here is the 123D CAD file depicting my model: Robot Project v.2
[Update 1st May 2016] Although I have tentatively decided to design and fabricate a "Terrestrial Rover that picks up Cigarette Butts" I am having second thoughts about the final level of complexity that this final project will include :)
Project Inspiration
The inspiration for this project came as a result of ideating what would be "cool to build" that "I've never attempted before". As a curator of maker events in Bangalore, India (where I reside) I am familiar with organizing plenty of events and initiatives that focus on smaller projects with discrete outcomes that can be completed in a day -- I wanted to get outside my comfort zone and try something really big with the help of my peers in Fab Academy, as well as with the support of the huge Maker community I have the privilege of being associated with in Bangalore (Bangalore Makespace).
Although the idea for the Terrestrial Robot with mini Robot Arm was something I conceived -- I realized that there were probably many such ideas and conceptualizations by others. The closest match to my idea that I found online happened to be images and instructions on how to create "Bomb Disposal Robots" (first and last pictures) in addition to a "Space Rover":

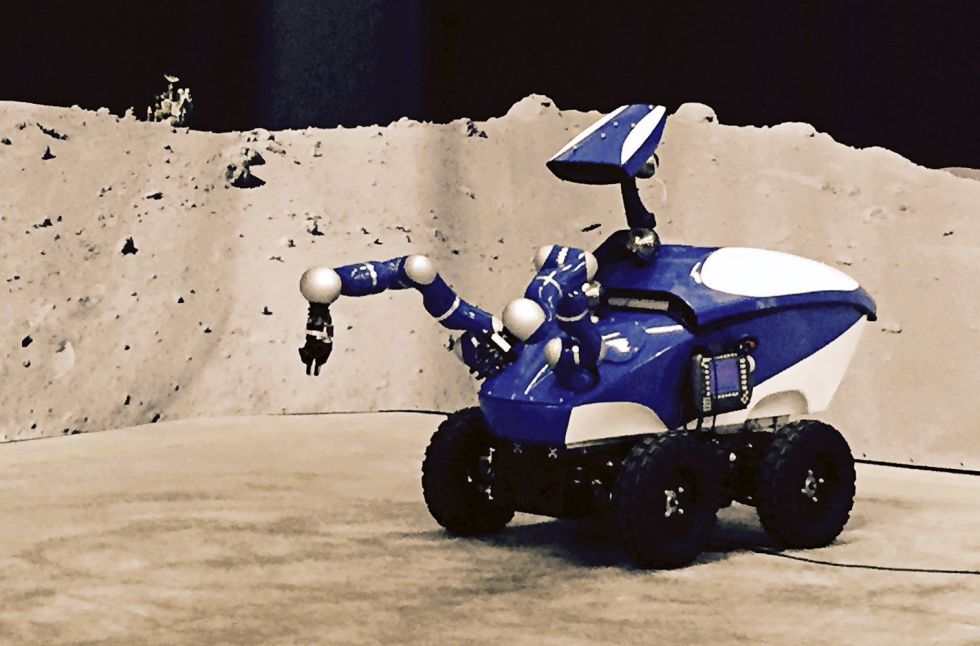

The "Termenator" Bomb Disposal Robot[Source] The "Interact Centaur Fibreglass Space Robot" [Source] The "ICO CAL-MINI (Mini-CALIBER Robot SWAT Robot)" [Source]
Project Breakdown
All the above real world example models helped me better structure my build. I decided I could go in two different routes -- the academic route based on tons of engineering drawings and careful measurements, numerous CAD models and some precise (but minimal) fabrication OR via the DIY route: which involved tons of iterations, tons of fabrication experiments using wood, metal, used and bought components and a lot of educated guesswork! Naturally, true to maker spirit, I chose the DIY route ;)
I divided the overall build into 3 distinct stages:
Rover Build: Design and Fabrication of the moving terrestrial robot portion of the overall build
Robot Arm Build: Design and Fabrication of the robot arm which would sit on top of the moving rover which would pick up the actual cigarette butts.
Partial Object Recognition and Obstacle Detection: Programming and Assembly of a potential camera/visual recognition system for the overall build
Stage 1: Rover Build and Assembly
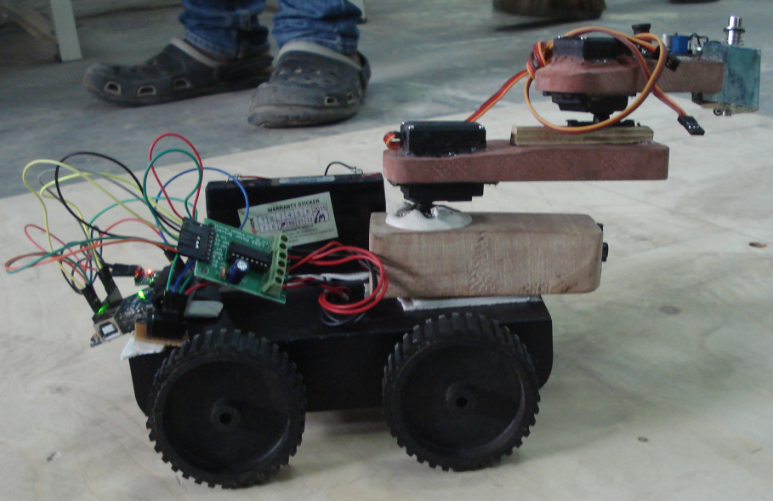
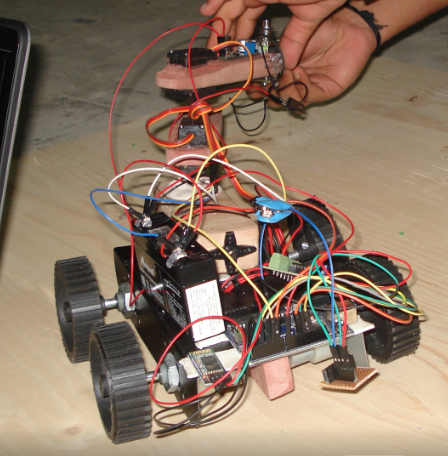
The Rover was the most fun aspect of this entire robot project! I have been inspired by mobile robotics for as long as I can remember, and Fab Academy gave me a chance to try some things I'd always wanted to, but kept putting off. I modeled the Rover based on an Arduino UNO microcontroller and varieties of motor driver modules, one of which included an L293 Motor Driver. I used pre-defined metal chassis' and readymade low-cost injection molded wheels to test the kinematics of the rover during initial prototyping, along with the drivetrain consisting of four 500 RPM geared DC motors. The visuals below highlight this experimentation
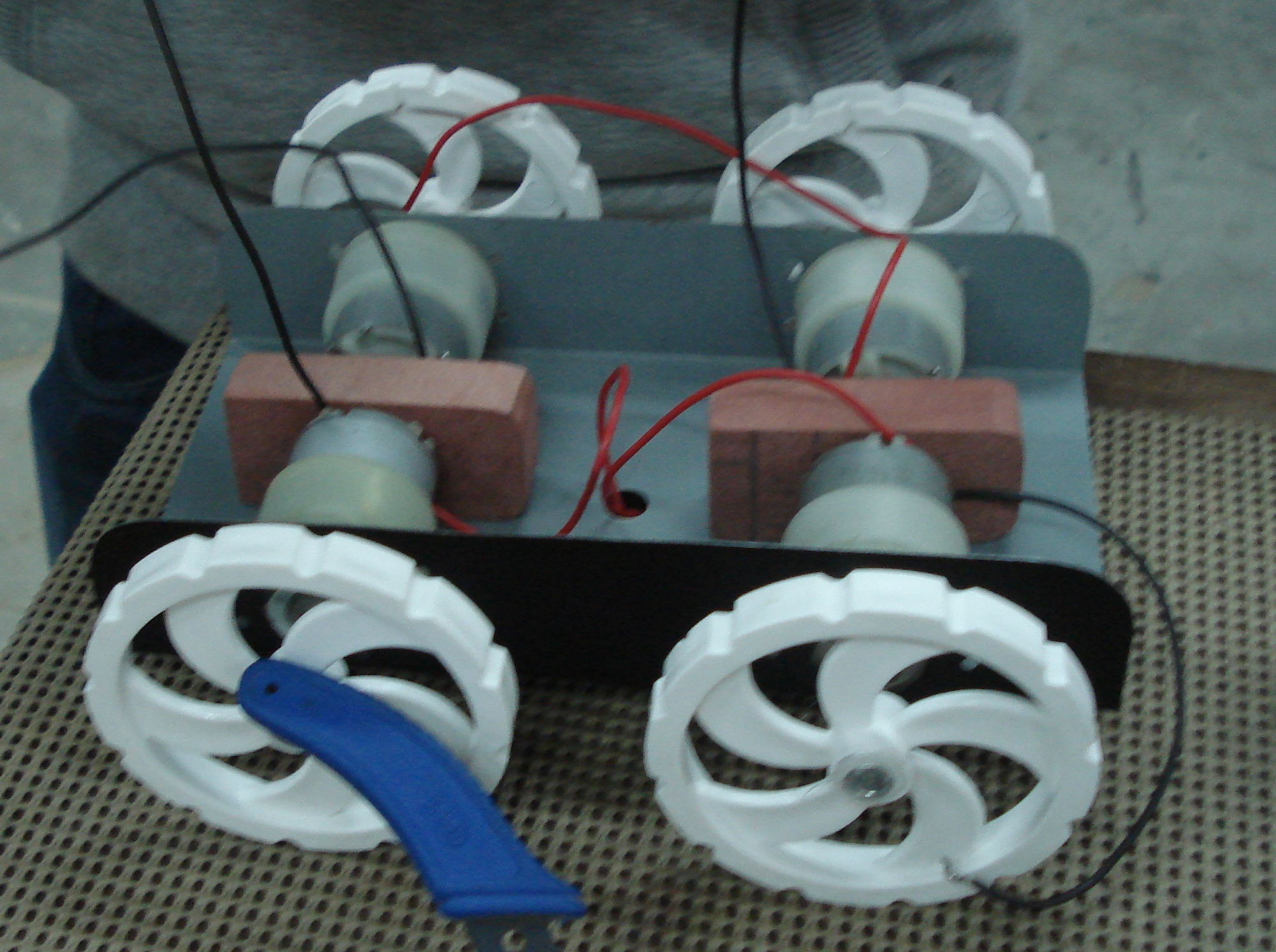
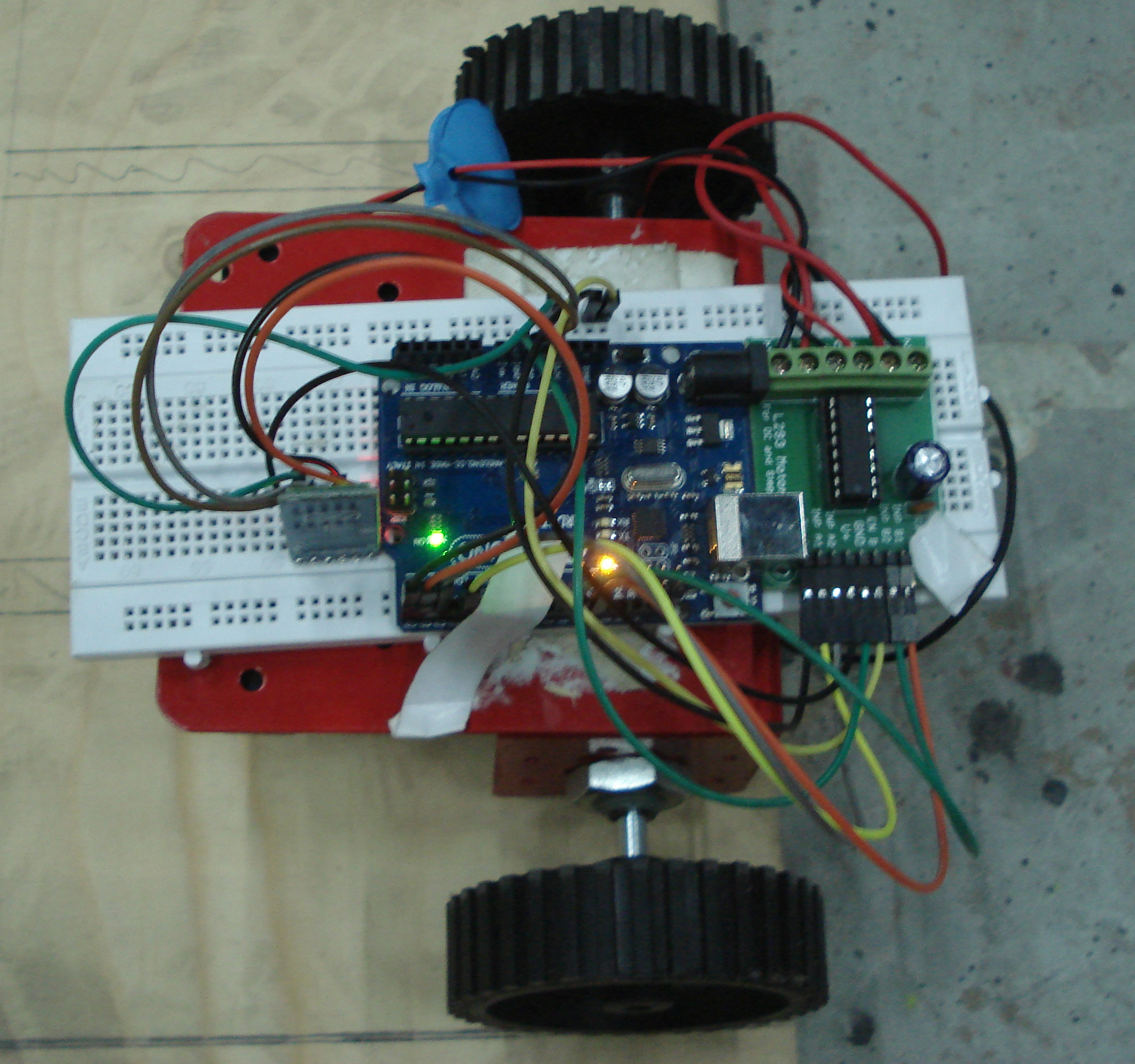
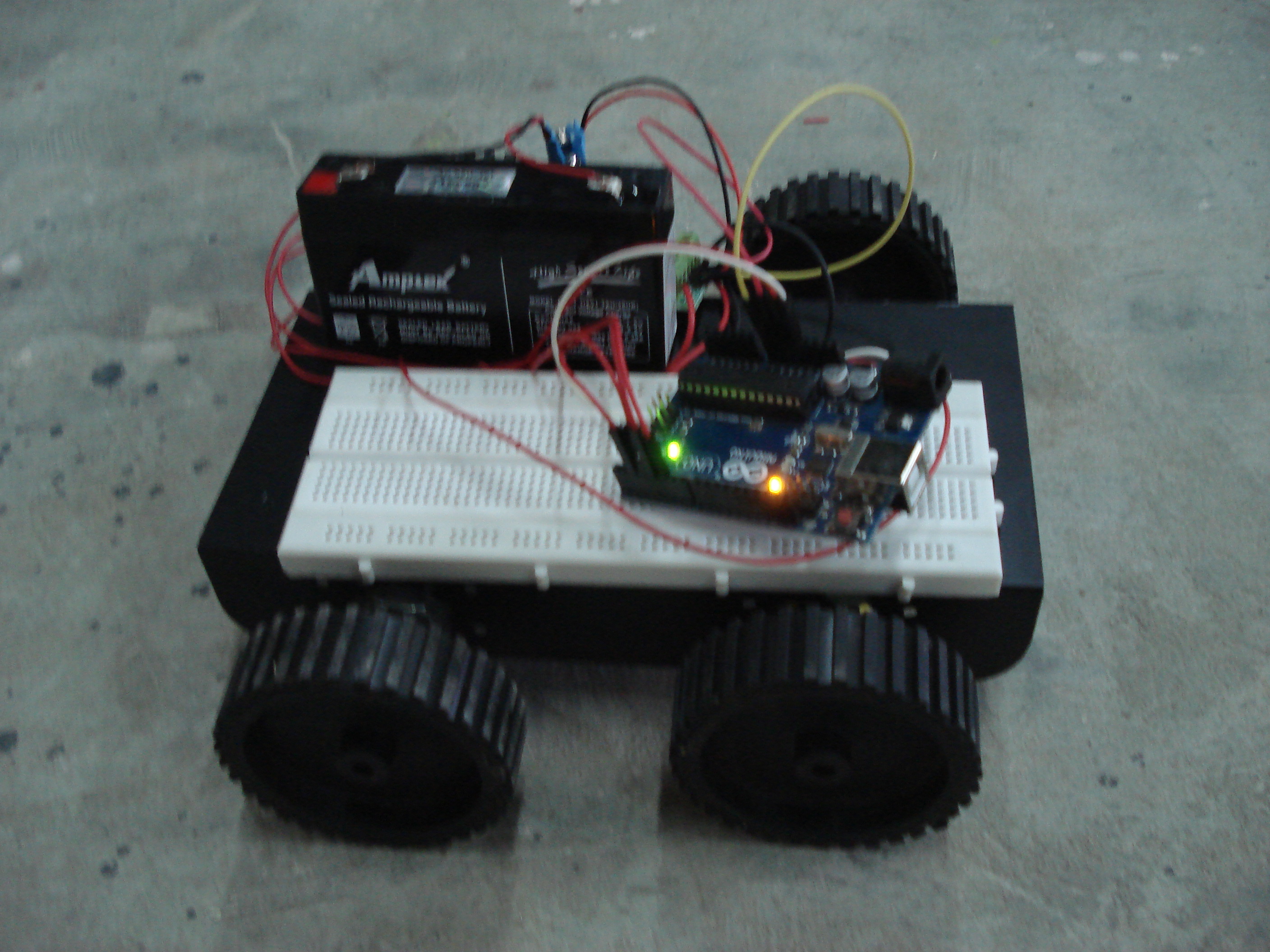
Ultimately, this is what I was able to create using the resources I had with me at the time:
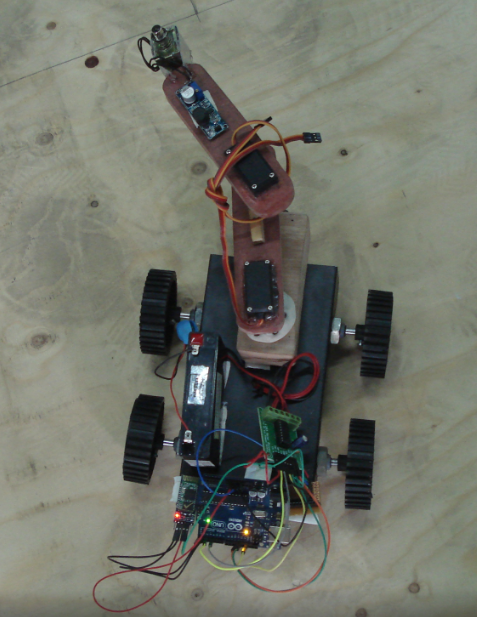
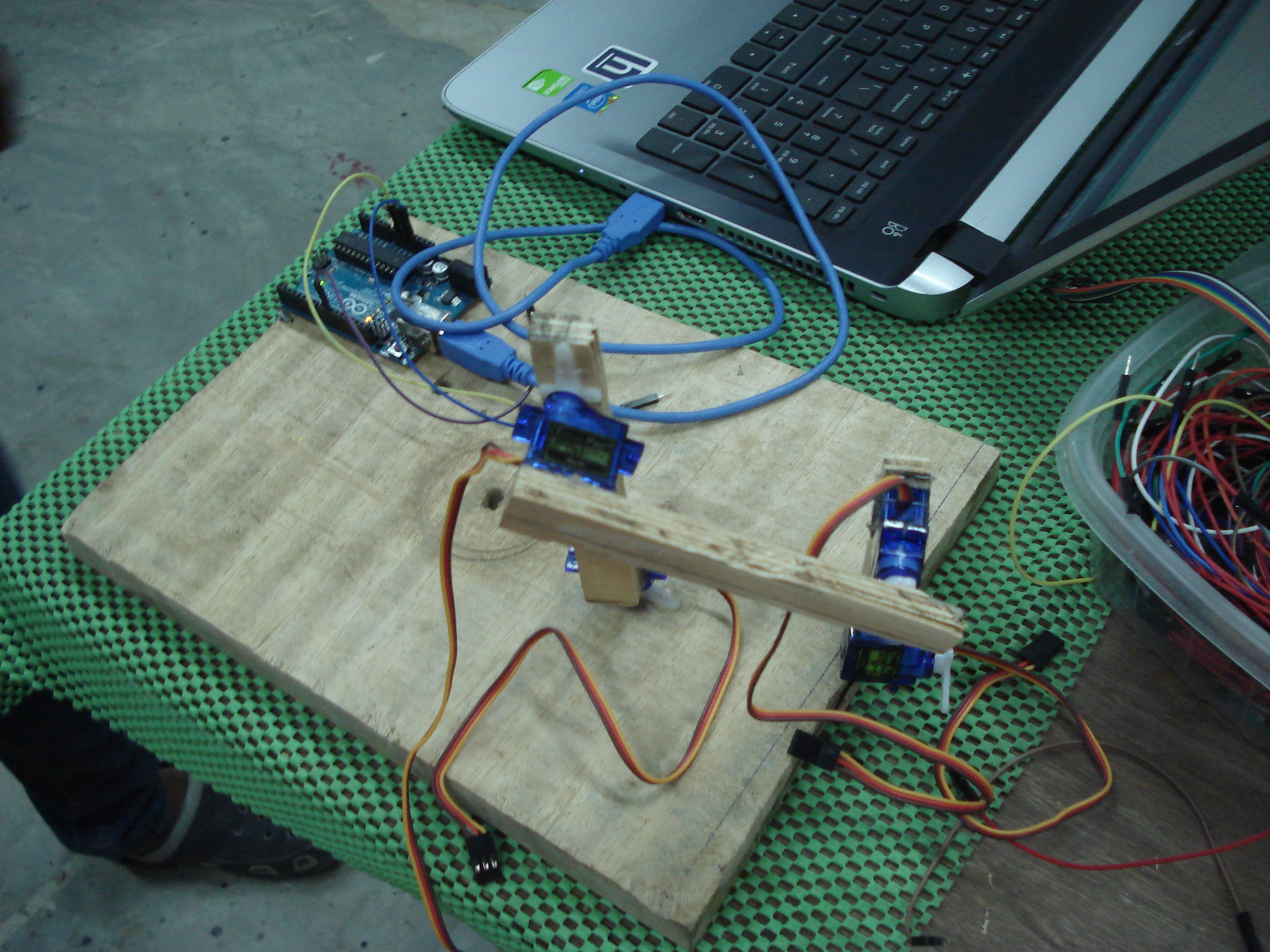
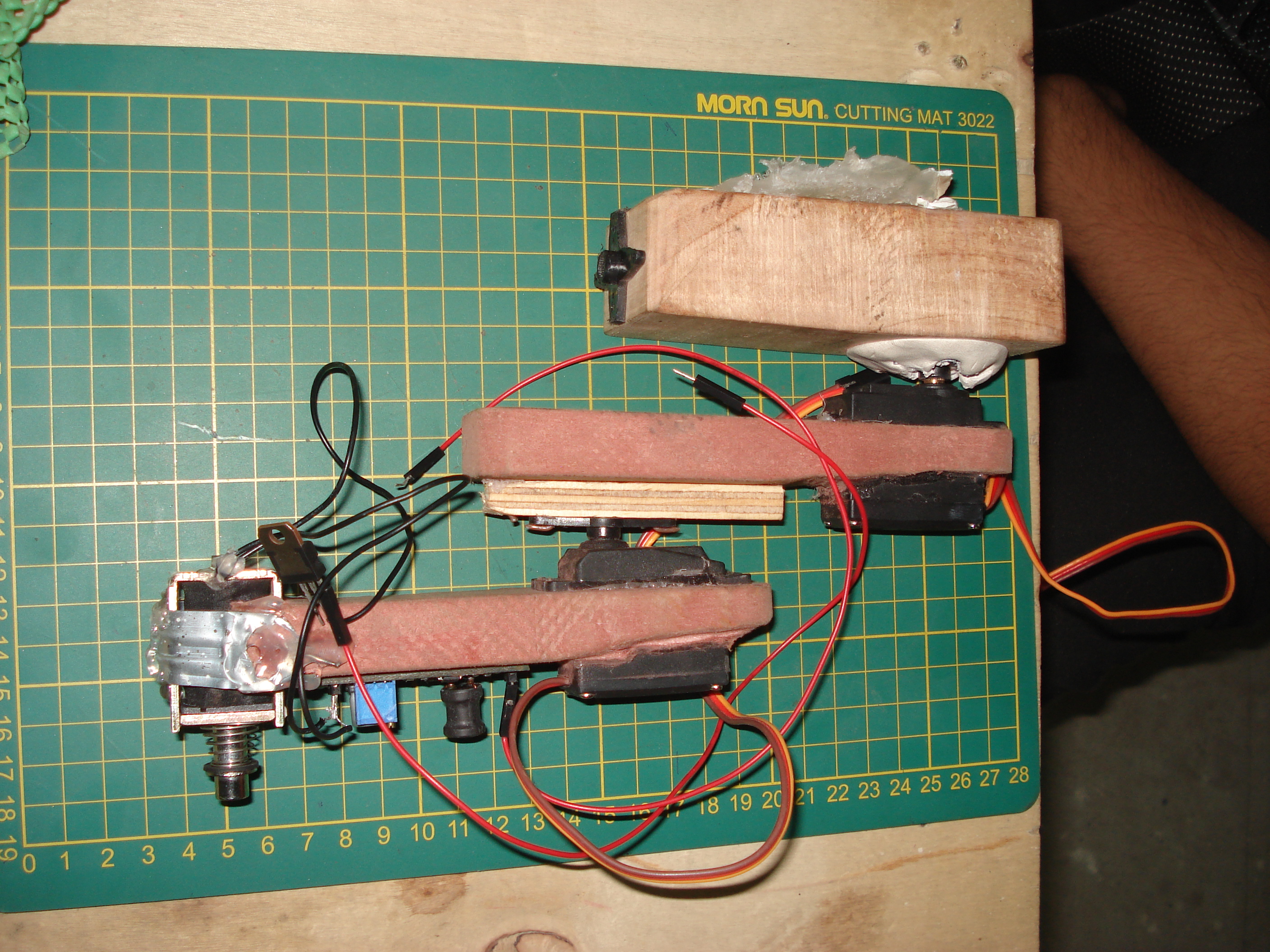
Stage 2: Robot Arm and Assembly
The Robot Arm was probably the most challenging aspect of this final project. I knew I had set myself up for multiple challenges when I first conceived the plan to attach an arm to a mobile robotic platform! However, I was a bit obsessed by the idea that my mobile robot had to "do something". In my mind, a utility-based rover that had an arm to "pick stuff up" seemed the most logical. Little did I know how not-so-straightforward this task would be! The visuals below highlight the various experiments I carried out to create different study models for the final arm in question:
Assignment Updates are still in progress!
Go back HOME