Networking and Communications
Assignment
design and build a wired &/or wireless network connecting at least two processors
What is Networking
interact with others to exchange information and develop professional is called networking.
Networking and Communications
Networking is the basically communication between two microcontroller, and thus tranfer data between them, we can control and co-ordinate here i did my input week with ultrasonic sensor i made the distance measuring mechanism and in output week i made a RGB LED here i am going to communicate with them before that i am going to learn some aspects about
Serial buses dot the landscape of embedded design. From displays to storage to peripherals, serial interfaces make communications possible.
Many serial communication interfaces compete for use in embedded systems. The right serial interface for your system depends on several key factors. In this article I will describe seven of the most common serial interfaces, to help you decide which bus is right for your next project.
Why serial
There are many different reasons to use a serial interface. One of the most common is the need to interface with a PC, during development and/or in the field. Most, if not all PCs have some sort of serial bus interface available to connect peripherals. For embedded systems that must interface with a general-purpose computer, a serial interface is often easier to use than the ISA or PCI expansion bus.
I2C
The Inter-Integrated Circuit bus (I2C) is a patented interface developed by Philips Semiconductors. (In order for an IC manufacturer to implement the I2C bus in hardware, they must obtain licensing from Philips.)
The I2C bus is a half-duplex, synchronous, multi-master bus requiring only two signal wires: data (SDA) and clock (SCL). These lines are pulled high via pull-up resistors and controlled by the hardware via open-drain drivers, giving a wired-AND interface.
I2C uses an addressable communications protocol that allows the master to communicate with individual slaves using a 7-bit or 10-bit address. Each device has an address that is assigned by Philips to the manufacturer of the device. In addition, several special addresses exist, including a “general call” address (which addresses every device on the bus) and a high-speed initiation address.
SPI
The Serial Peripheral Interface (SPI) is a synchronous serial bus developed by Motorola and present on many of their microcontrollers.
The SPI bus consists of four signals: master out slave in (MOSI), master in slave out (MISO), serial clock (SCK), and active-low slave select (/SS). As a multi-master/slave protocol, communications between the master and selected slave use the unidirectional MISO and MOSI lines, to achieve data rates over 1Mbps in full duplex mode. The data is clocked simultaneously into the slave and master based on SCK pulses the master supplies. The SPI protocol allows for four different clocking types, based on the polarity and phase of the SCK signal. It is important to ensure that these are compatible between master and slave.
Netwoking with my Ultrasonic to RGB
what i am planning is that to connect my input and output week thats based on the reading of the ultrasonic sensor i am going to vary the color combination of the RGB
first i plan to program the ultrasonic attached board
For the programming i refered the schematic diagrams
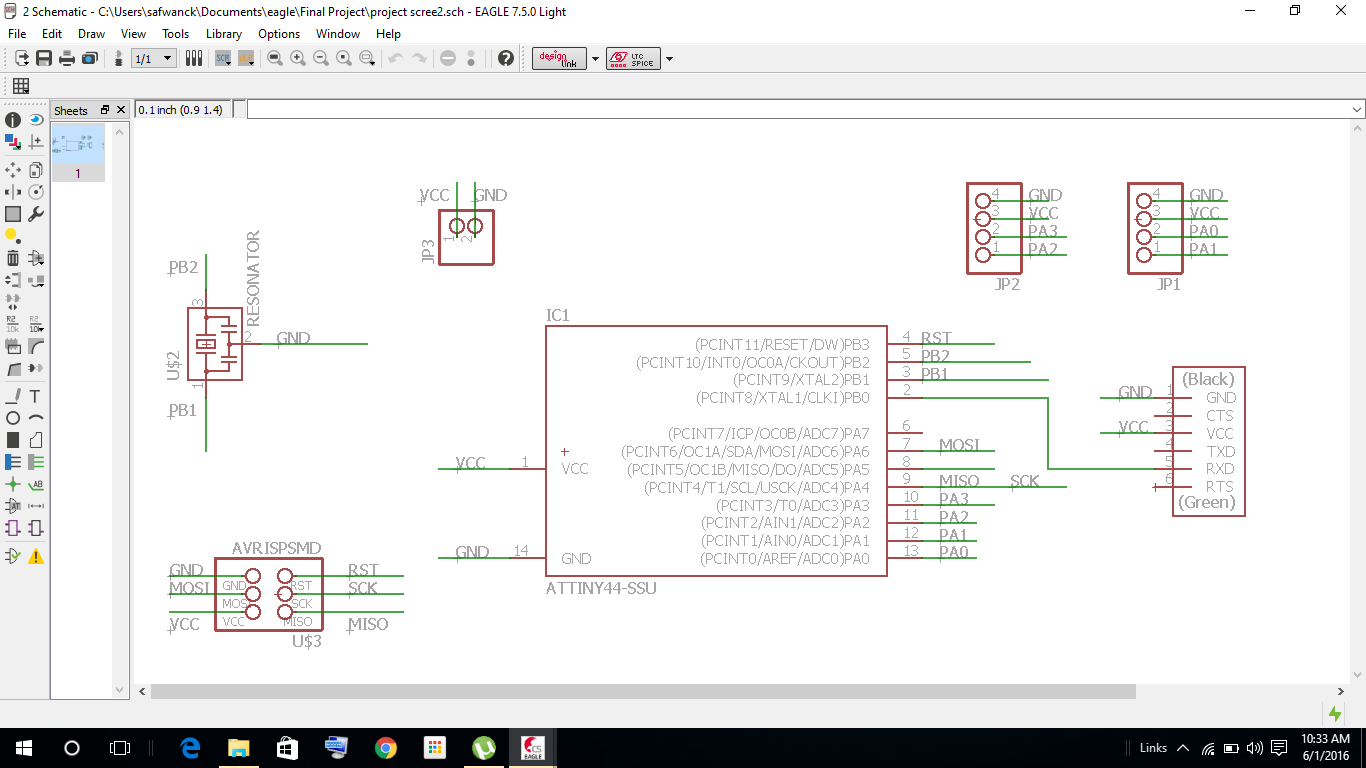
here is the board diagram
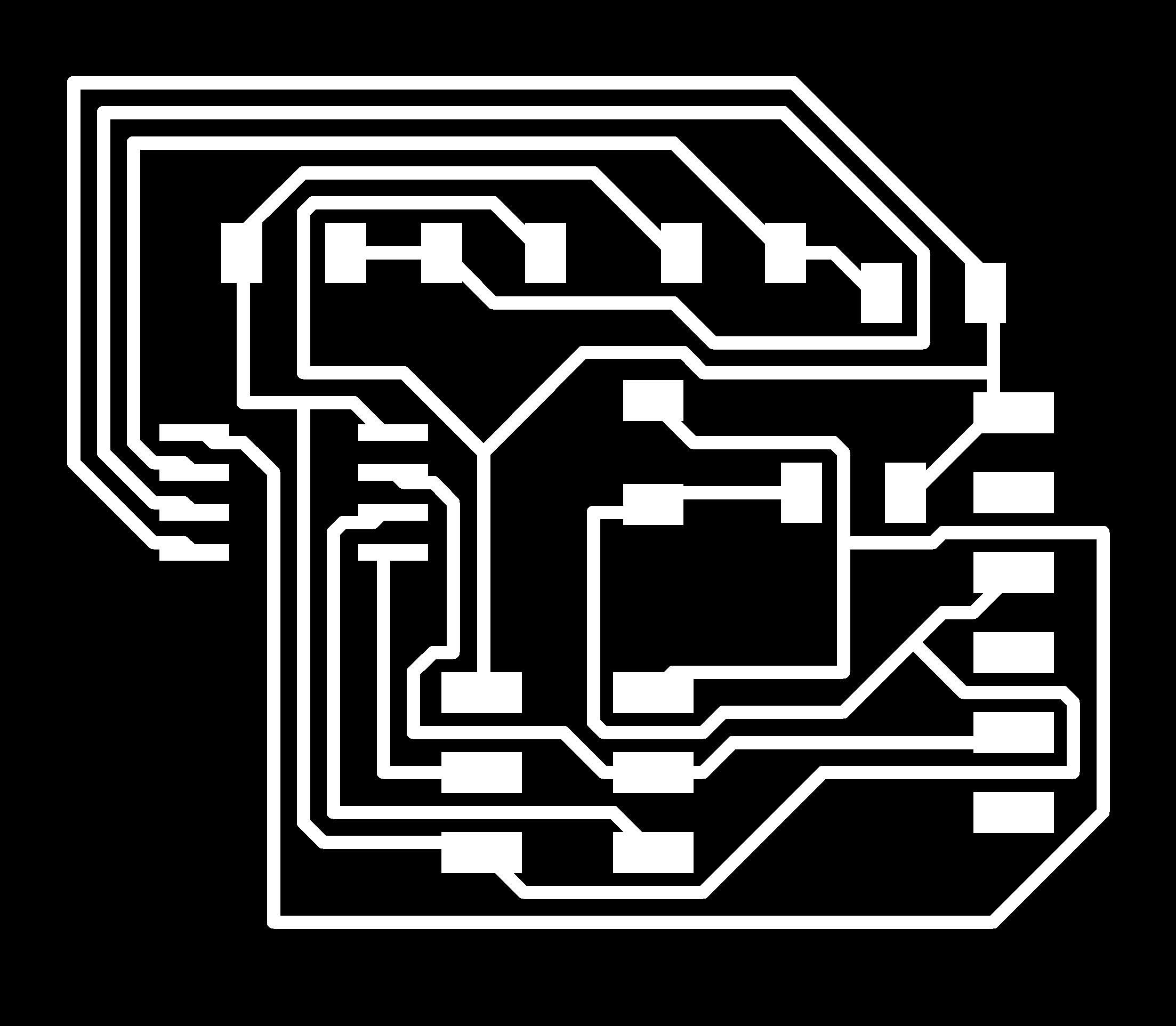
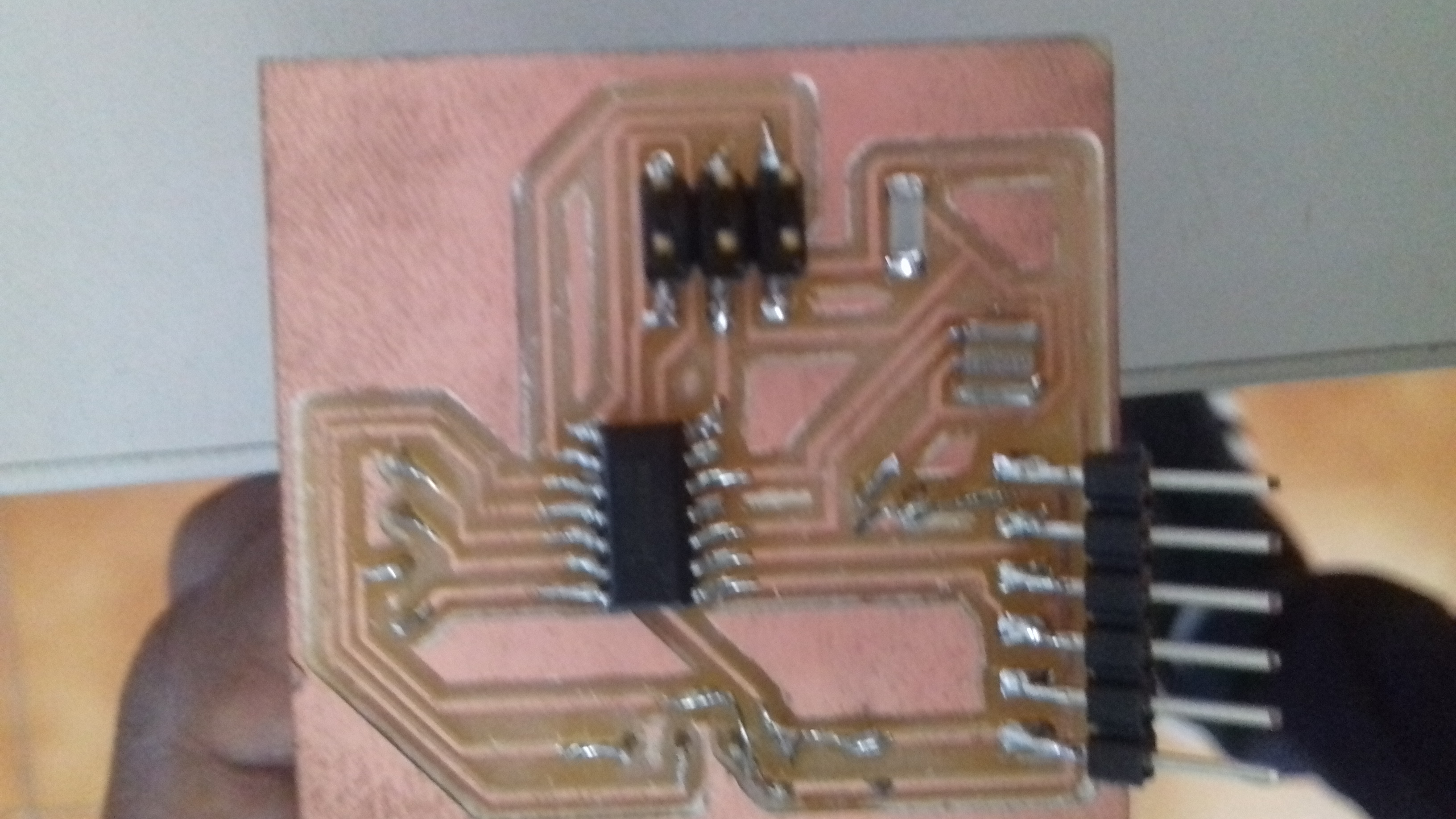
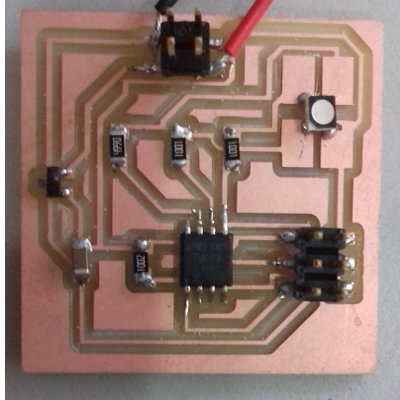
here is the board
For The programming I preferd the arduino program
#include <NewPing.h>
#include <SoftwareSerial.h>
#define RxD 1
#define TxD 2
#define DEBUG_ENABLED 1
int Range = 0;
SoftwareSerial sserial(RxD,TxD);
NewPing sonar(0,1,30); //NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup()
{
sserial.begin(9600);
}
void loop()
{
// Range = sonar.ping();
sserial.write(Range);
sserial.write('#');
}
Stating the RGB led program
the schematic diagram of RGB board

Download the orginal files
{kind=link}
here is the stuffed RGB board
program
#define redPin 1
#define greenPin 2
#define bluePin 0
#define RxD 1
#define TxD 2
#define COMMON_ANODE
#include <SoftwareSerial.h>
SoftwareSerial sserial(RxD,TxD);
void setup()
{pinMode(redPin, OUTPUT);
pinMode(greenPin, OUTPUT);
pinMode(bluePin, OUTPUT);
sserial.begin(9600);
}
char c;
int range = 0;
int t;
void loop()
{
c = sserial.read();
if (c == '#')
{
range = 0;
}
else
{
t = c;
if (t > 47 && t < 58)
{
t = t - 48;
range = range * 10 + t;
}
}
if (range<10)
{
setColor(range*25, 0, 0);
}
else
{
if (range<20)
{
setColor(255, range*25, 0);
}
else
{
setColor(255, 255, range*25);
}
}
}
void setColor(int red, int green, int blue)
{
#ifdef COMMON_ANODE
red = 255 - red;
green = 255 - green;
blue = 255 - blue;
#endif
analogWrite(redPin, red);
analogWrite(greenPin, green);
analogWrite(bluePin, blue);
}
The above progam has two parts has it works in two different boards.
The first part is meant for the board that interfaces with the ultrasonic snesor. It’s stright forward, just initializes the ultrasonic sensor, takes the reading from it and send it via a soft-serial output. Between each reading, a ‘#’ is inserted to identify the end one reading and the beginning of the next.
The second part of the program is meant for the LED board. This accepts the serial data from the other board. The data is recived character by charecter. If ‘#’ is found, the vlaues are reset. if a sequence decimal is found, it’s converted to a number. This number, if less than 10 the RED led in the RGB led is lit up with the appropriate brigtness. If more than 10 and less than 20, RED is lit with full brighness and GRENN with the brightness corresponding to the distance, similarly for the distance between 20 and 30. For more than 30 all are lit with full brightness.