week 5
3D Scanning and Printing
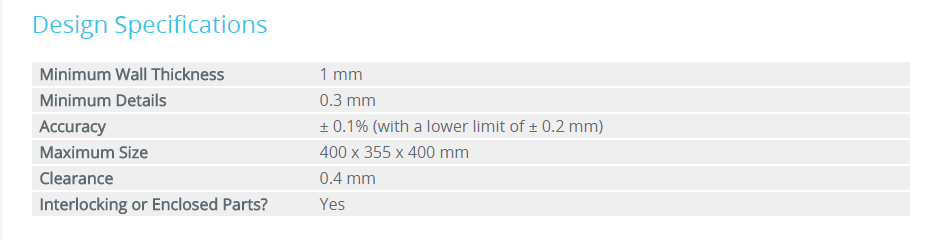
Test the design rules for your printer(s)
Design and 3D print an object that could not be made subtractively
3D scan an object (and optionally print it)
In Tecsup we have the Makerbot replicator 2x, for testing, download Thingiverse files , the first result was not good as we used the default settings of the printer, then we read the manual and some recommendations on the basic settings such as temperature, infill, speed among others. Being able to observe better results.On a website we found some basic rules, tips, and tricks to design a printable model in ABS. Since we could only print with ABS
A limitation detected in the makerbot software is that it has a very generic automated interface which does not allow to test with different styles of supports, to save time and print with better finishes.
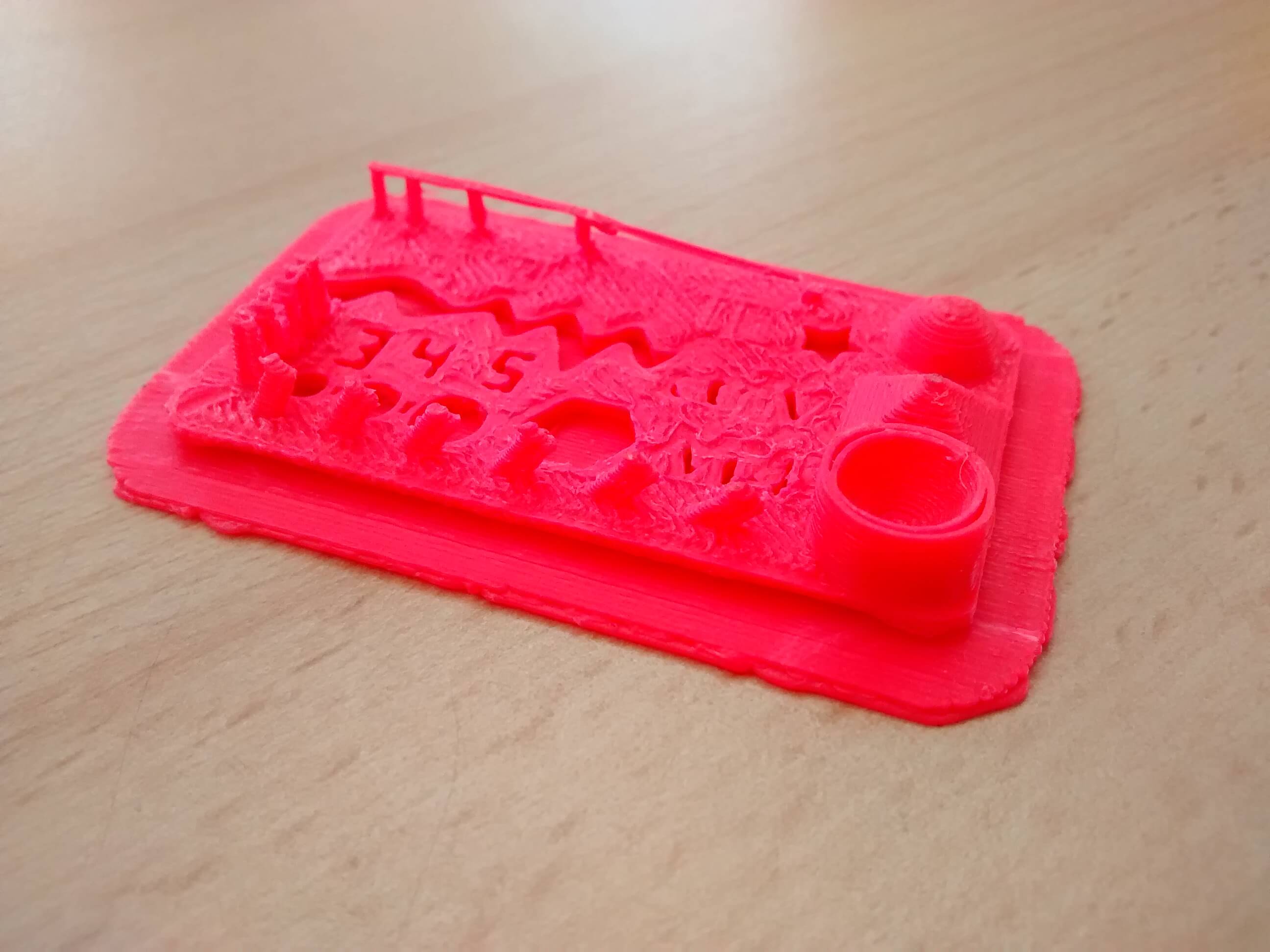
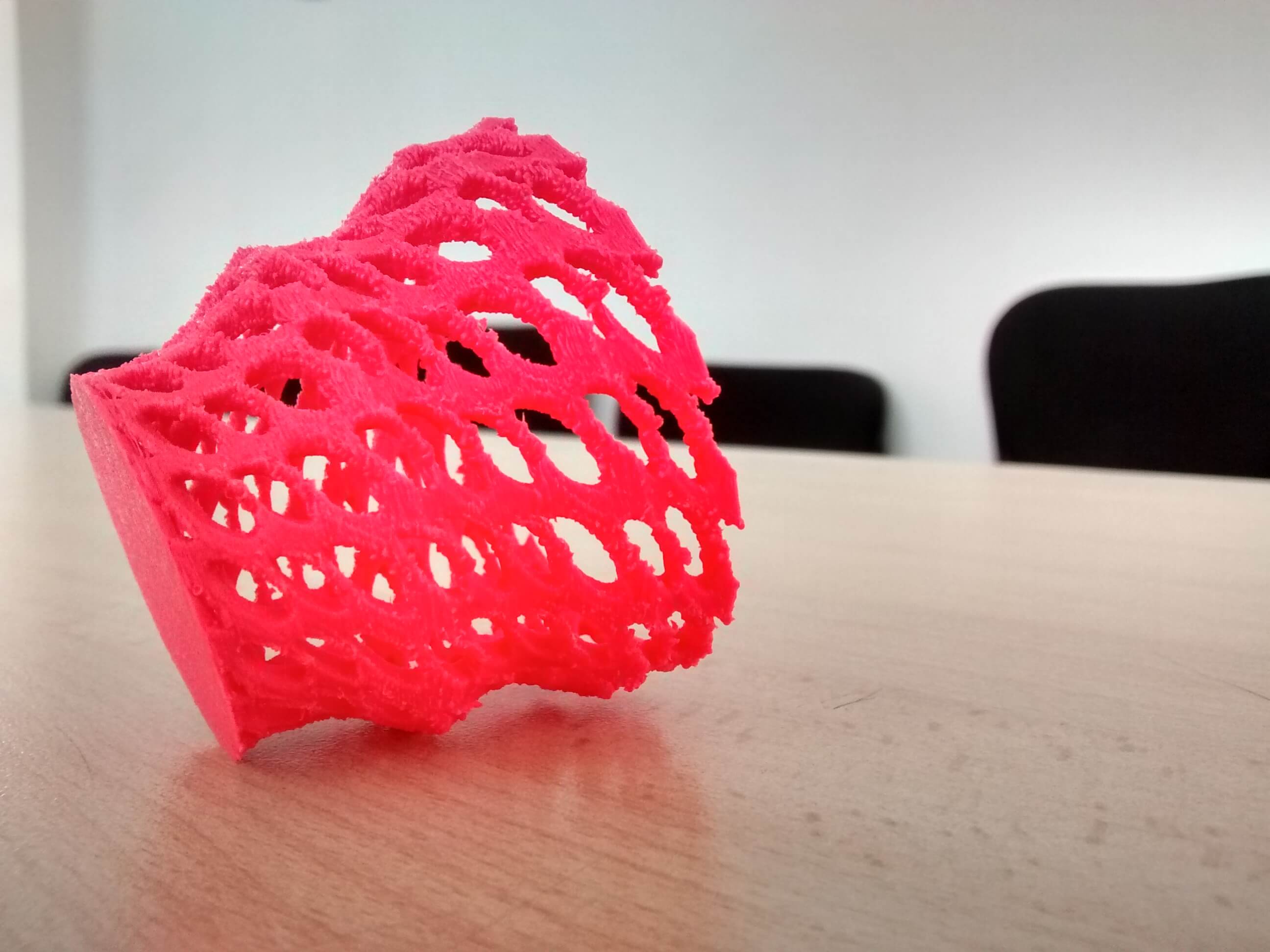
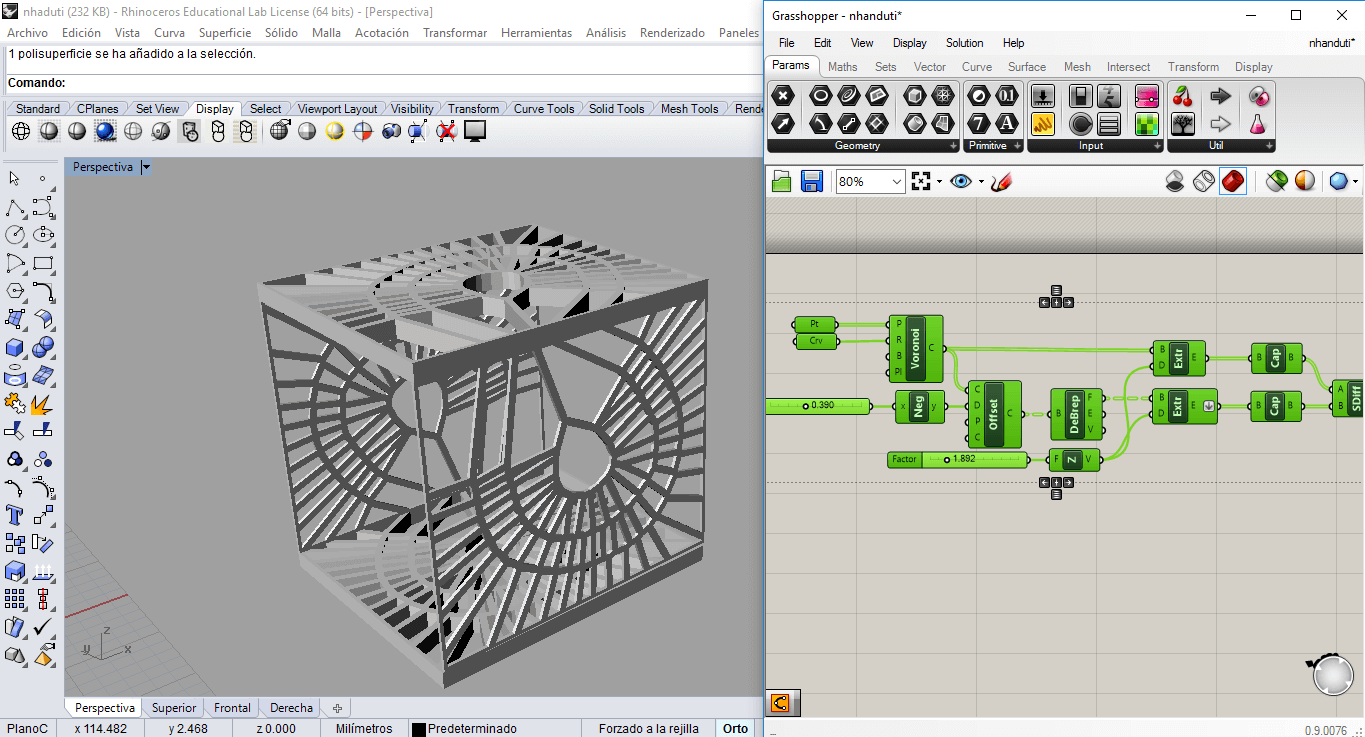
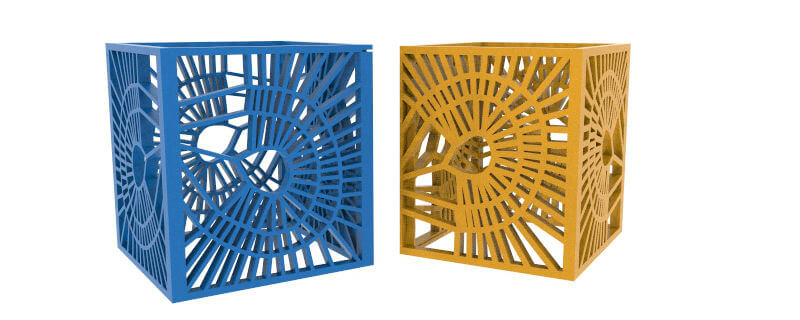
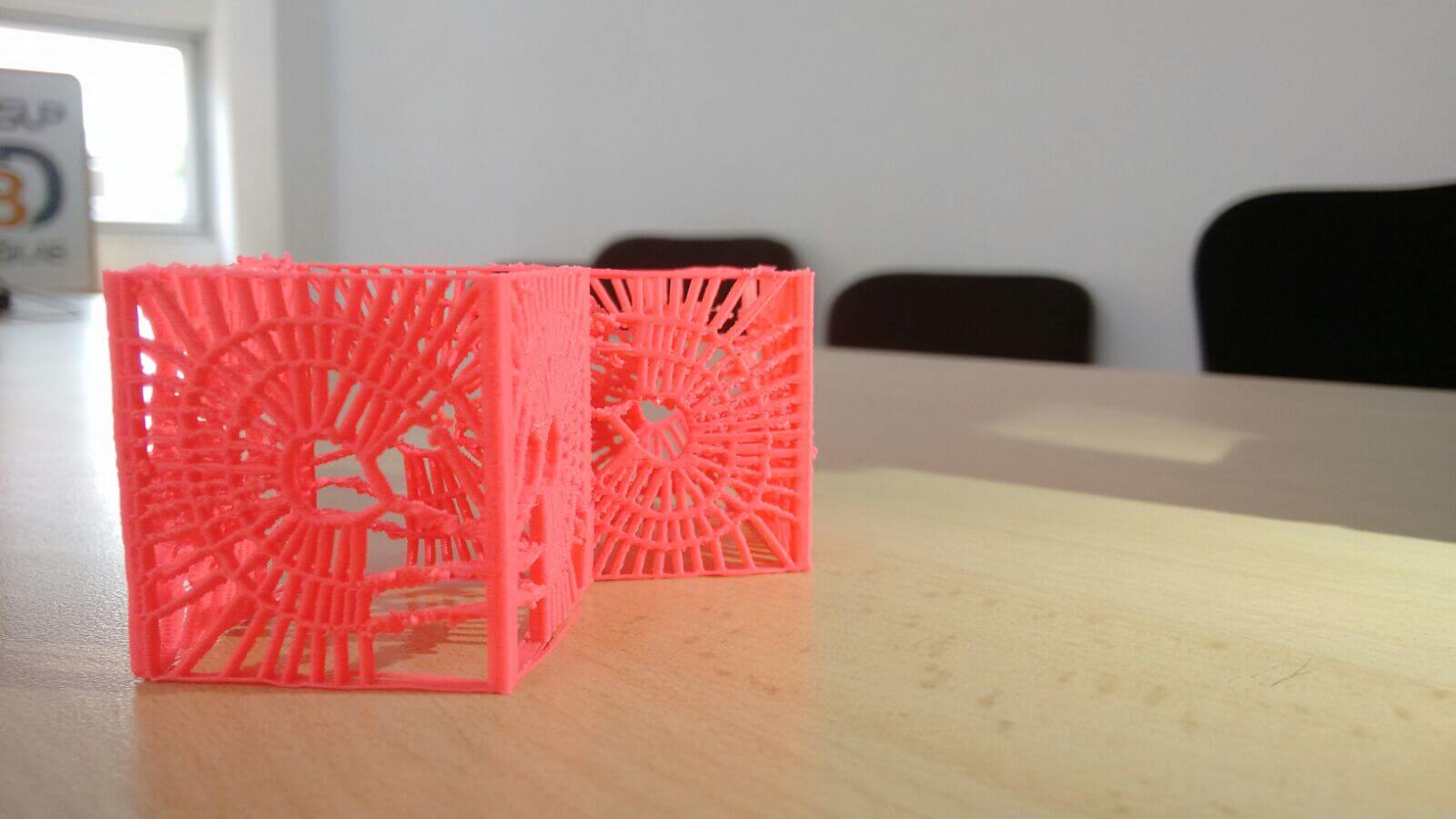
To test with parametric design, I designed a cube with four Voronoi surfaces inspired in a Ñanduti tissue (spider like tissue in Guarani, Paraguay's native language) This object also allowed me to set some parameters for printing fine structures.

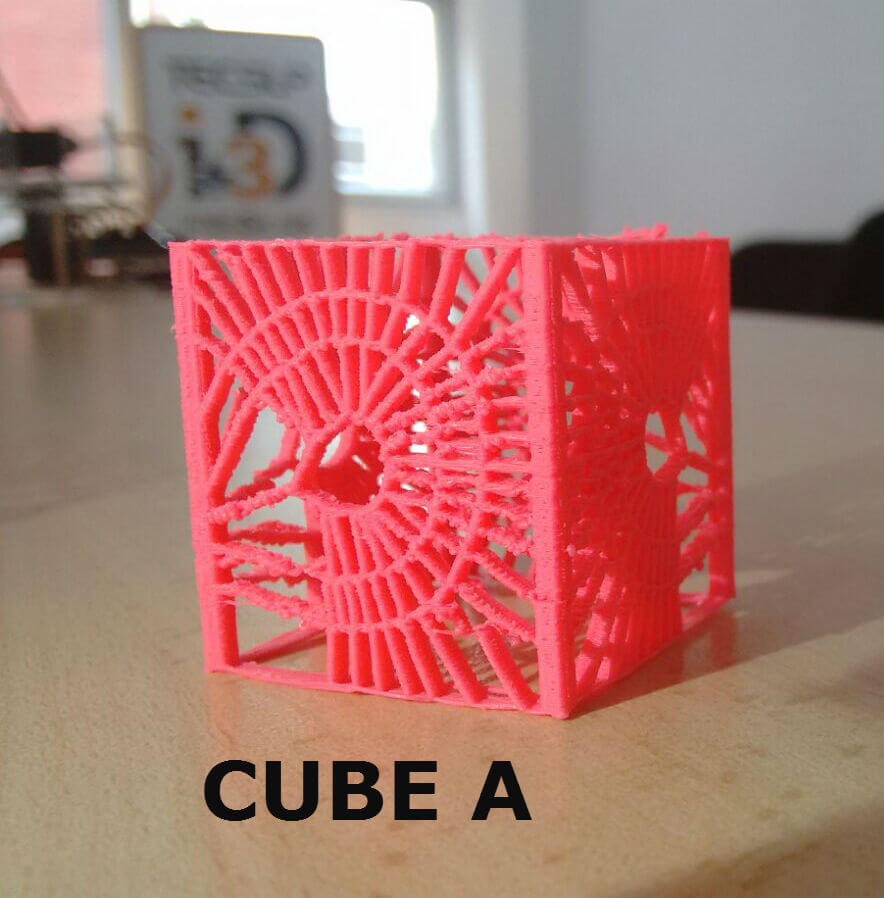
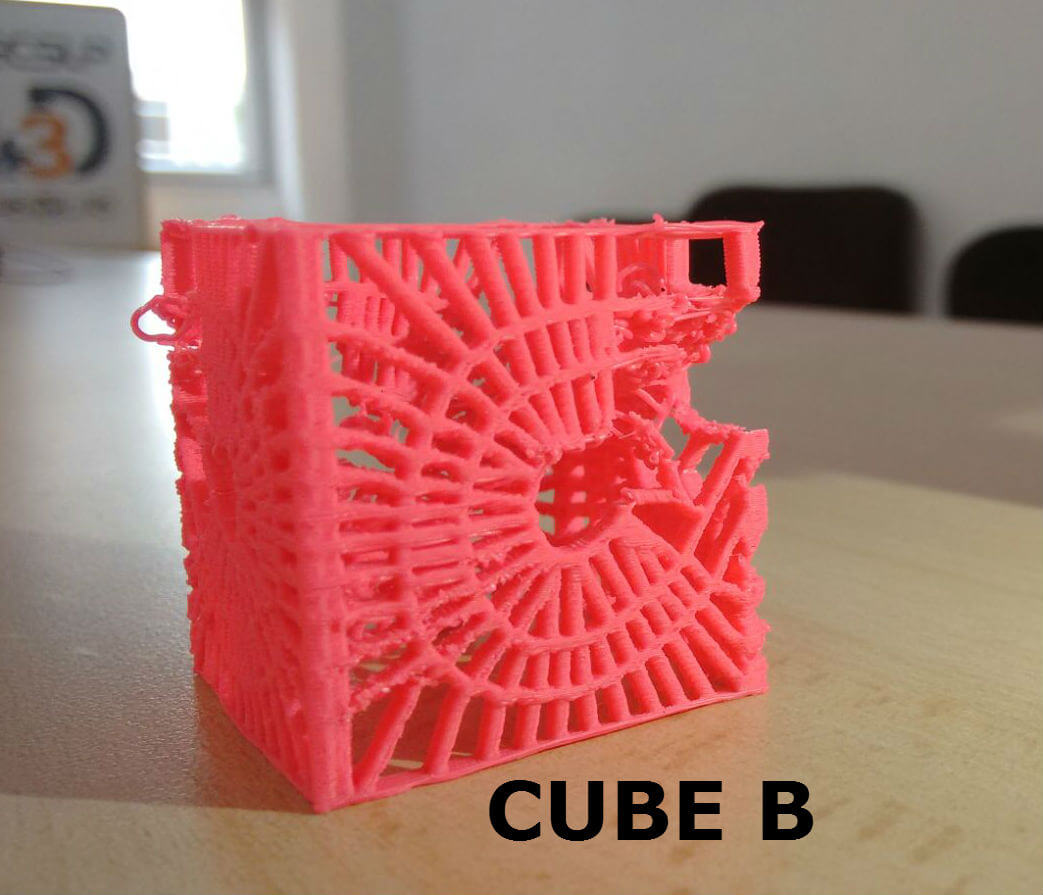
To print, I tried two cubes, each with dither of different thickness, the result is displayed in the pictures. Cube "A" (fine dithering) completed the whole impression, but the finish was not polished as some strips generated ledges. While the Cube "B" (hatched thick) had a better construction, but the position on the print bed was unfavorable to the upper corners, because the support of the print was lost.
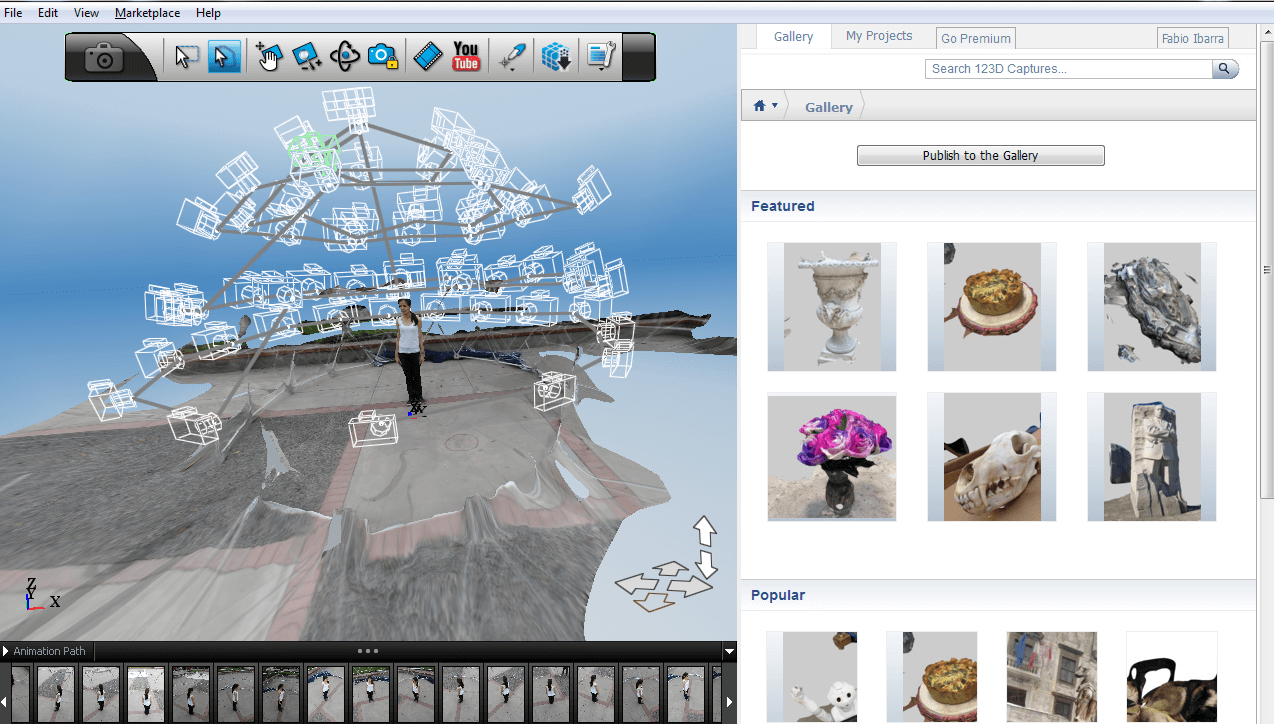
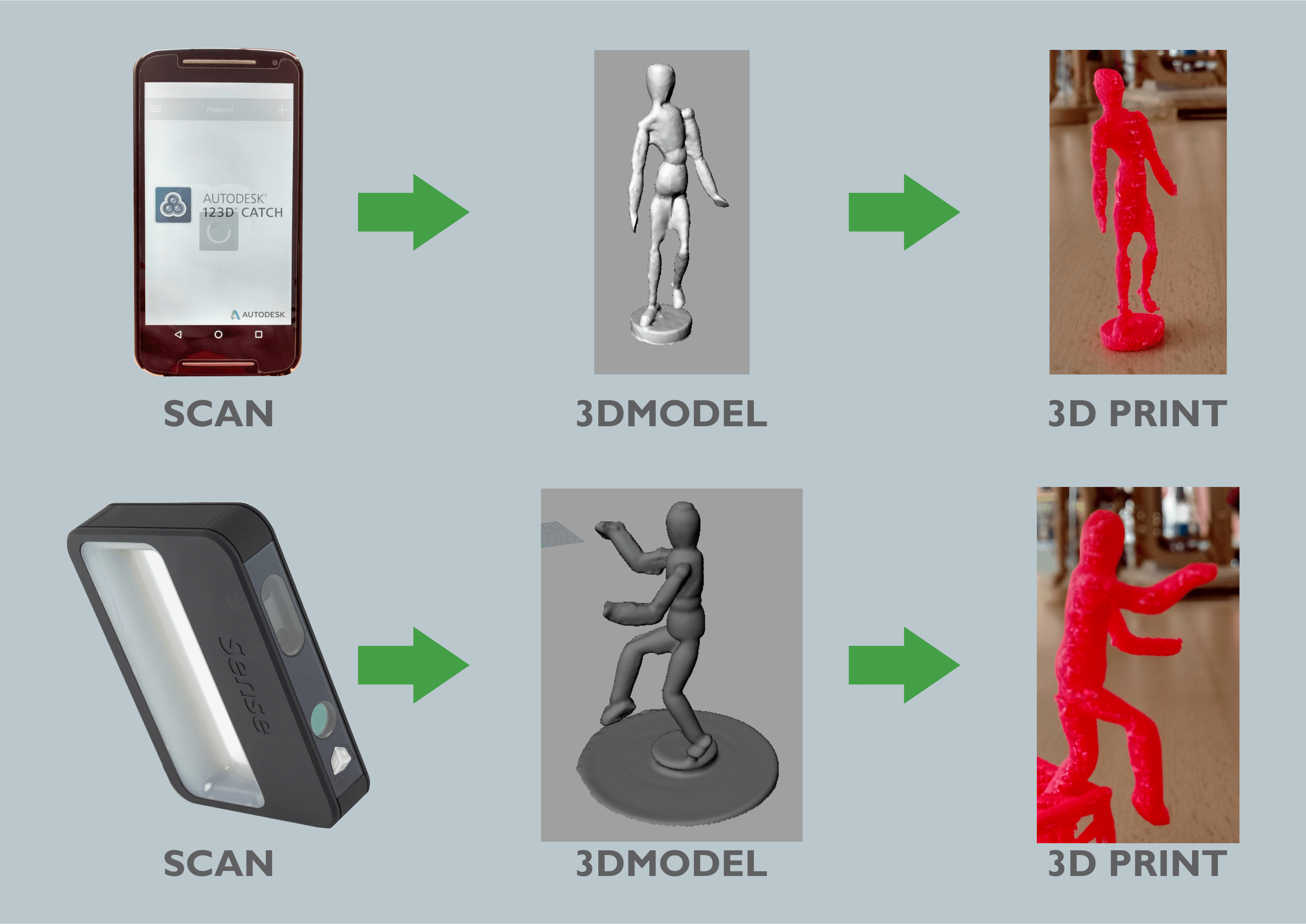
For 3D scanning, I tried Autodesk 123D Catch with my mobile phone and with 3D systems sense scanner, I used the same object to compare the results. In the image is displayed as the 123D catch is more useful for detailed objects, the sense result in increased volume of the object.

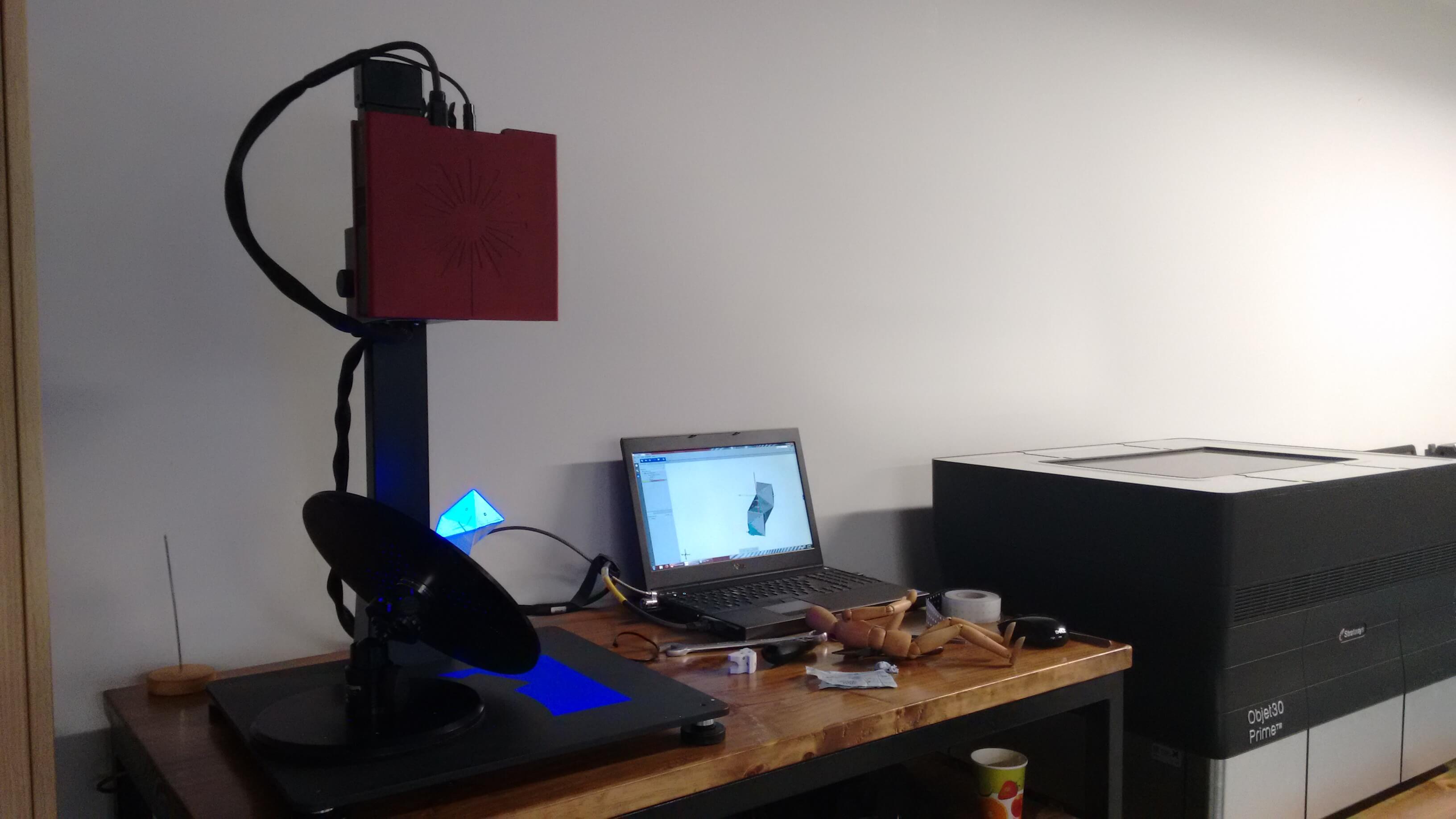
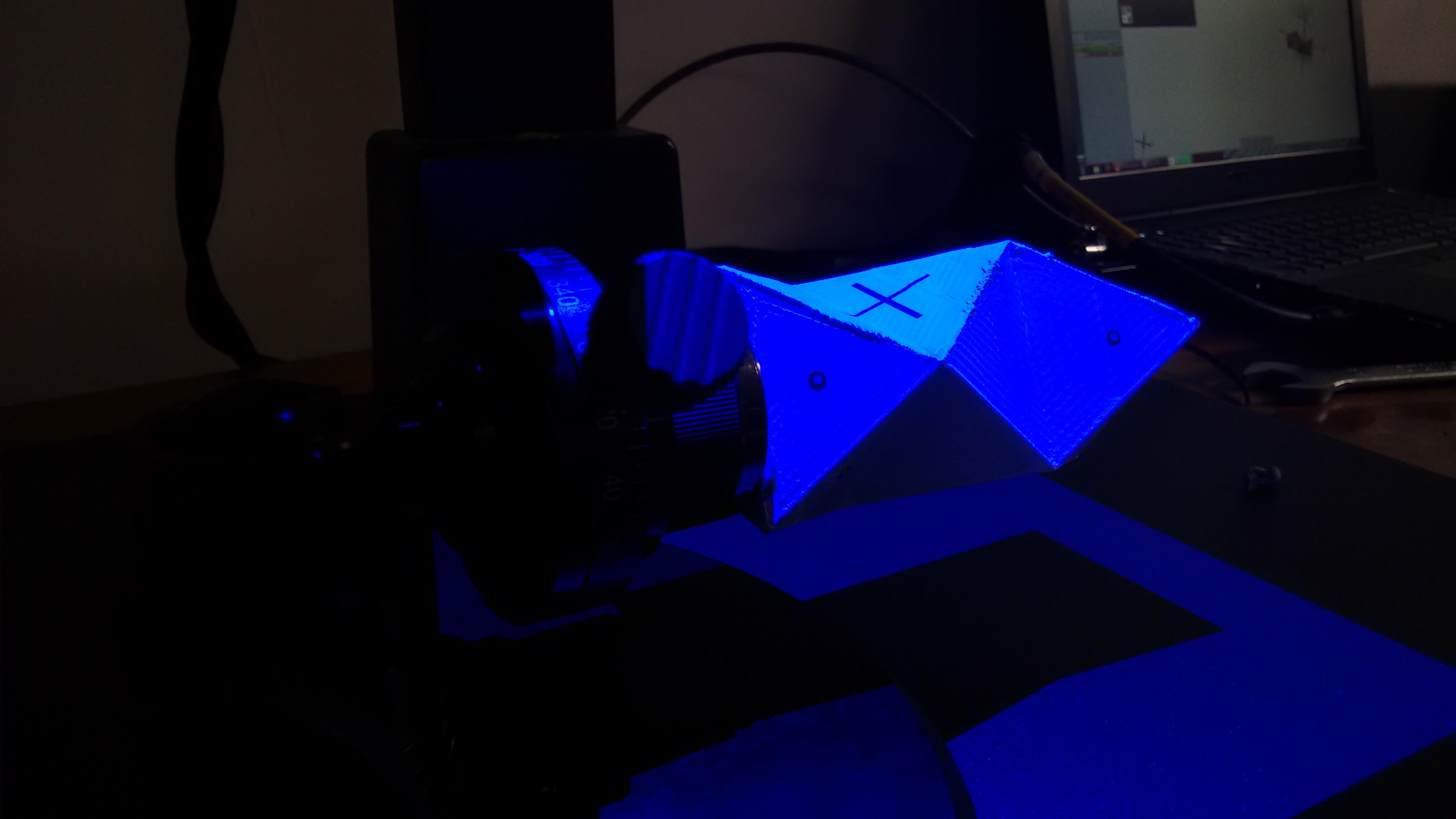
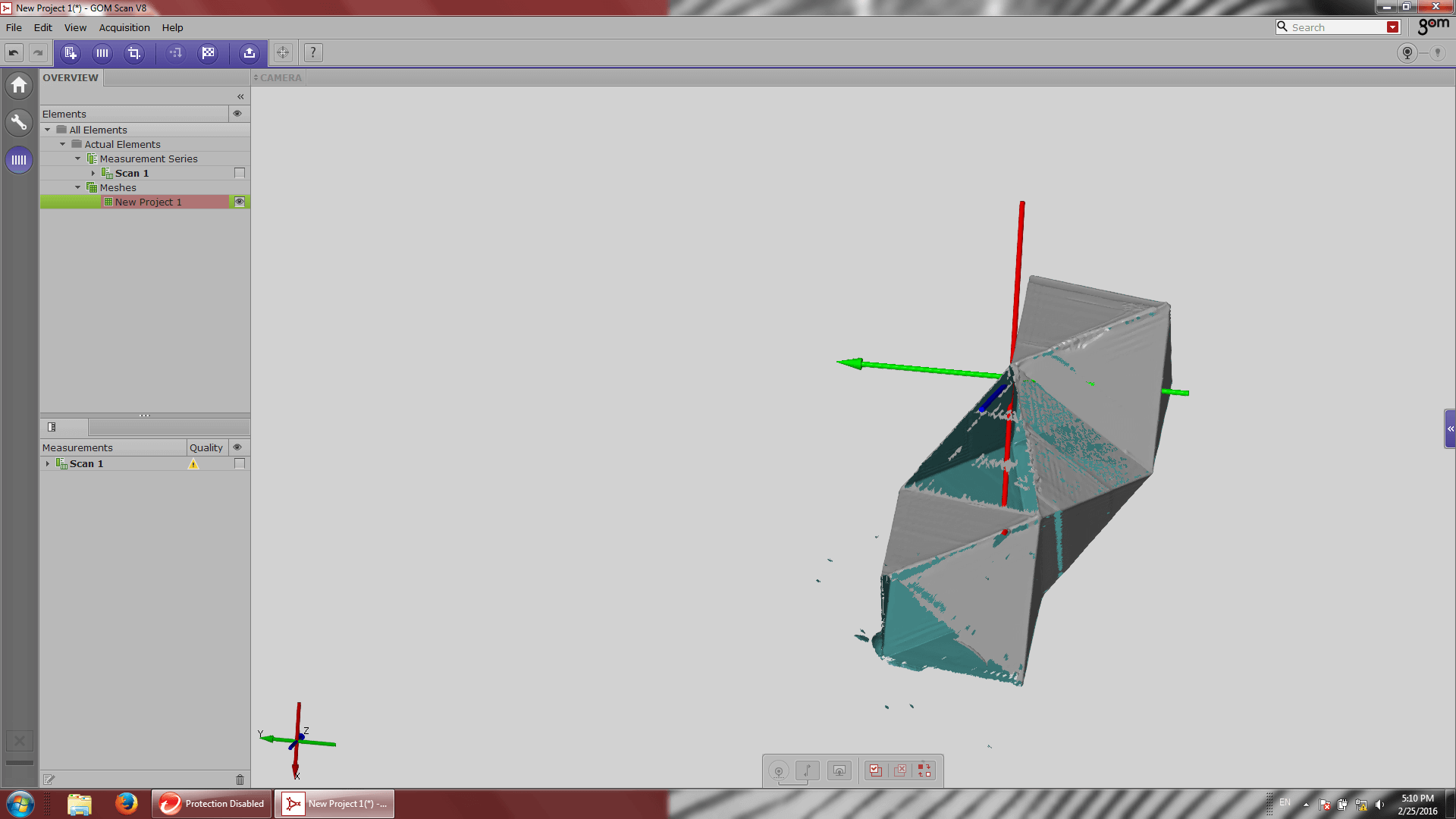
Also, with my partner tried a high precision scanner Atos Core, this works by placing identified benchmarks that allows arming the object go through different shots. We didn't have much time for experiment to get the desired results, but with the tested learned that the object should not be bright material, preferably works best if it is white. If the object is symmetrical, it is recommended to place points in helical way because if you place them aligned the program it's confused and doesn't finish assembling.
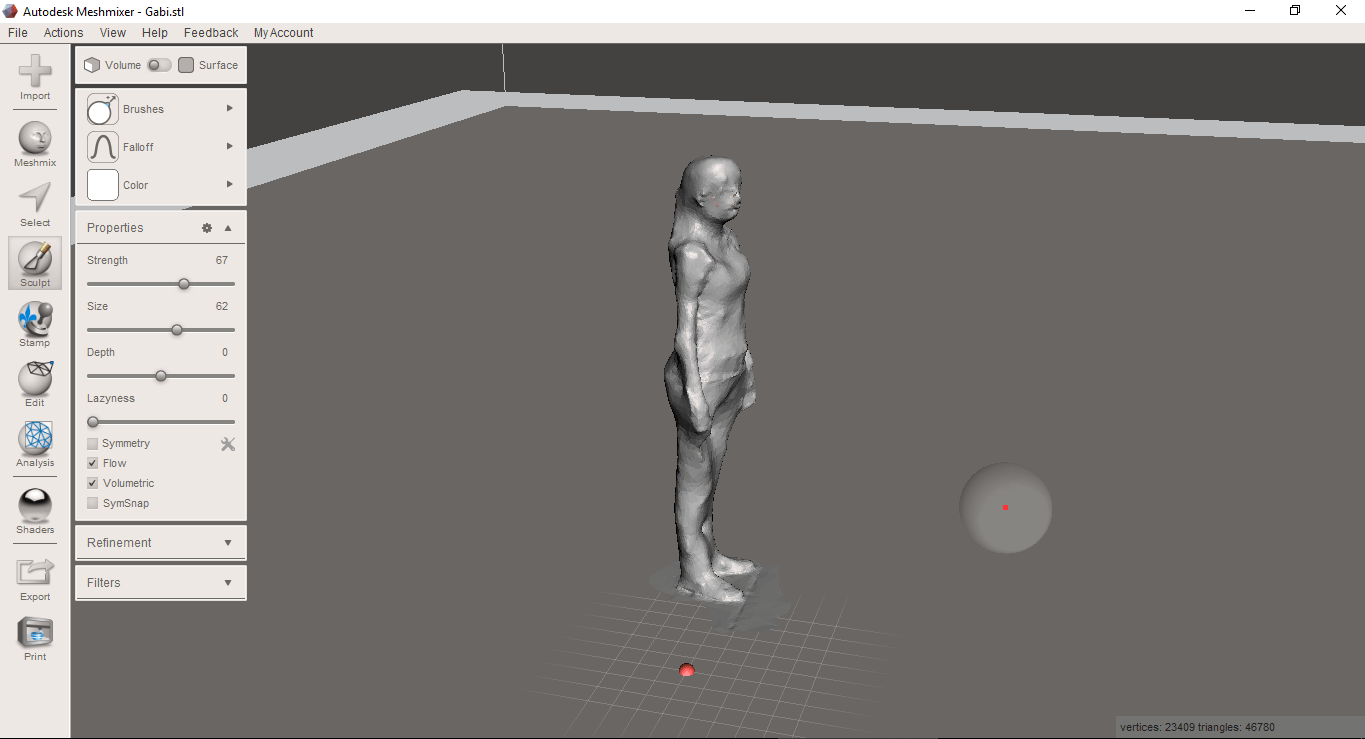
Another thing that we tried was to use a Domo structure to scan because using the joints as reference for taking pictures in all the necessary angles to later build a 3D model. We took photos with a Canon T3, imported photos to 123d Catch and clean the file with Meshmixer.